
基于物联网技术的非机动车协同防盗系统
2018-06-29 06:00马向进周新明李学飞欧朴康包学才
物联网技术 2018年6期
马向进,周新明,李学飞,欧朴康,包学才
(南昌工程学院 信息工程学院,江西 南昌 330099)
0 引 言
社会公共安全一直以来都是热点问题,非机动车防盗也已成为社会公共安全的关注热点之一,由于非机动车存在易盗易销赃以及丢失后追踪困难等问题,导致电动车被盗案件高发,而目前的防盗系统却不能有效改善这种局面。
目前,针对非机动车偷盗的问题,市场上也出现了一些预警防盗系统。其大体分为两类:一是单一的振动感应报警系统,其以单片机作为控制单元,弹簧开关(振动传感器)作为信号触发,蜂鸣器作为报警装置。通过触发系统中振动传感器工作,检测车体是否有人触碰,进而控制系统报警,通过报警器模块震慑偷盗者[1,2];二是安装基于GPRS或GSM方式传输报警信息的装置,通过红外传感器检测车体周边是否有人靠近,通过GPS对车体进行定位,若检测到车体发生位移,便通过GPRS或GSM方式传输报警信息给车主[3-6]。但是这两类防盗装置都存在一定的不足之处。对于前者,单一传感器仅仅起到震慑偷盗者的作用,不能及时传输预警信息,以及被盗后装置无法持续追踪车辆位置;对于后者,防盗器后期的维护费用较高。此外,当车辆处于类似地下停车场等信号较差的场所时,易产生预警盲区防盗系统无法有效预警。
从目前防盗系统存在的缺点着手,依托物联网技术应用推广的大环境[7],本文提出了一种智能协同防盗系统,该系统主要特点包括以STM32作为系统的主核芯片,很大程度上降低了系统的功耗[8];以智能无线射频网络和智能传感器技术作为系统核心;通过多智能传感器感知,降低系统虚警率;运用无线射频传感网络通信[9]进行预警信息的传递,减少用户后期对防盗系统所支付的维护费用;无线射频采用LoRa扩频技术,其传输能力强,在减少传输过程中信息丢失的同时有效解决了高功耗问题[10];提出并建立协同防盗网络,解决非机动车在信号盲区下的持续追踪问题;此外,充分结合当今物联网技术开发独有的手机APP,实现人机同步。因此本文设计了一款智能的、应用型强的、用户可接受的、在无流量费用下持续协同的多等级智能预警以及可持续智能防盗追踪的防盗系统。
1 系统架构与工作原理
整个系统可划分为感知层、汇聚层和应用层三个技术层级,采用物联网和云计算两项核心技术,感知层以振动传感器、红外传感器、位移传感器等多传感器的信息采集作为防盗预警端,以穿透能力较强的无线射频RF 433作为汇聚端的数据收集,以手机APP、商用云平台作为预警决策终端,采用协同防盗策略,实现多预警器协同持续追踪报警功能。在监测预警过程中,采用规范的数据包格式来描述非机动车状态,有效进行数据传输和区分。
1.1 多传感器监测端
感知层包括振动传感器、红外传感器、位移传感器、智能报警器等多传感器,及GPS定位信息采集,预警报警器,发送采集信息的无线射频端。通过多传感器综合运用,起到预警防范和提醒用户的作用,进而降低系统虚警率。
鉴于现有报警系统传感器单一和虚警率较大的问题,本文提出多传感器等级预警这一概念,如下所述:
一级预警:红外传感器检测到人靠近车体时,系统会再次进行感应检测以避免误判干扰。再次感应检测到有人时,系统便视车体处于一级预警状态并向主机发送报警信息;
二级预警:振动传感器检测到人触碰车体时,系统会再次进行感应检测以避免误判的干扰。再次感应检测到有人时,系统便视车体处于二级预警状态。此时MCU驱动蜂鸣器发声震慑靠近者,并向主机发送报警信息;
三级预警:位移传感器感知到车体移动时,系统便立即视车体处于三级预警状态(最高级别预警状态)。此时,蜂鸣器发声更加强烈,并向主机发送最高级别报警信息。
1.2 无线通信网络
汇聚层包括接收信息的无线射频端和蓝牙中转端,主要用于中转采集信息。无线射频接收端在接收感知层报警信息后,通过微控制器MCU中转经蓝牙发送给应用层,解决了防盗系统后期维护费用高的问题,减少用户后期开支。
汇聚层中的通信也奠定了系统通信的基础。系统采用无线射频RF 433通信技术便于预警信息的准确传输,此外采用LoRa扩频技术,实现预警信息的远距离传输,从而获得更广的传输范围和距离;通过蓝牙通信技术有效将汇聚层接收的预警信息传送给应用层(APP),成功建立预警端和应用层之间的桥梁;此外,借助商业云平台,将手机APP接收到的丢失态信息发布在云平台中,便于车主寻找。
1.2.1 无线射频RF 433
无线射频RF 433模块应用于预警信息的传输,分布在感知层信息发送端和汇聚层信息接收端。感知层采集的预警信息会通过RF 433向外广播,此时处在汇聚层的RF 433接收到外来信息并发送给MCU进行数据的处理分析。
为了有效解决信号盲区问题以及由于GSM,GPRS传输信息所产生的流量费用等问题,本文提出通过无线射频RF 433技术传输预警信息,选取433 MHz免授权频段进行数据传输;选用低频段通信旨在提高信息传输穿透能力、解决信号盲区问题;为进一步提高RF 433无线射频模块的传输效率,对不同装置的产品信息、用户信息、车体所处状态等信息进行编码,以构建无线通信网络,进而提高信息的传输距离。
1.2.2 协同防盗
当非机动车被盗时,此时系统便默认车体为丢失状态,并向外界发出求救信号,其中求救信号包含此时的定位信息、时间、非机动车的序列号等。借助建立的无线通信网络,一方面可以直接通过无线传感网络传输给用户,起到提醒和追踪的作用,另一方面接收到车体求救信号的其他用户可以向服务器传送该车辆的状态信息,方便丢失车主根据自己车辆的信息进行车辆位置查询。
1.3 智能追踪应用层
应用层包括面向用户的Web和APP。Web主要用于丢失态信息发布,便于用户查询搜索,APP主要用于建立人与系统的桥梁达到实时监测。该部分主要功能是解决车辆丢失后的追踪问题和实现智能可持续追踪。由以RF 433构成的无线传感网络、手机APP应用端以及商业云平台构成。其中无线传感网络用于车辆后的丢失态信息传输,手机APP用于收集监测信息,进而通过WiFi或基站经互联网传到云平台进行信息的发送。
无线传感网络的构成可实现远距离信息的传输,解决了单个通信设备传输距离较近的问题,采用无线传感网络可有效将信息快速准确地传送给用户。手机APP则用于收集监测信息,非丢失车主接收到信息后可通过WiFi或基站经过互联网传输到云平台进行数据信息的发布,丢失车主可在该平台进行信息查询。如若丢失车主接收到信息,则可直接根据信息对车辆进行定位,将无线传感网络和智能手机APP相结合,实现了物网相连,进而达到持续追踪、协同防盗目的。
该系统提出了一套完整的防盗解决方案,充分利用物联网技术的各种信息传输手段(GPS、无线射频、蓝牙等),实现信息的有效传输与处理,解决了非机动车防控、及时预警、持续追踪等一系列问题,可以保证24小时远距离监控,及时消除被盗隐患,持续追踪被盗车辆。系统的整体构架如图1所示。
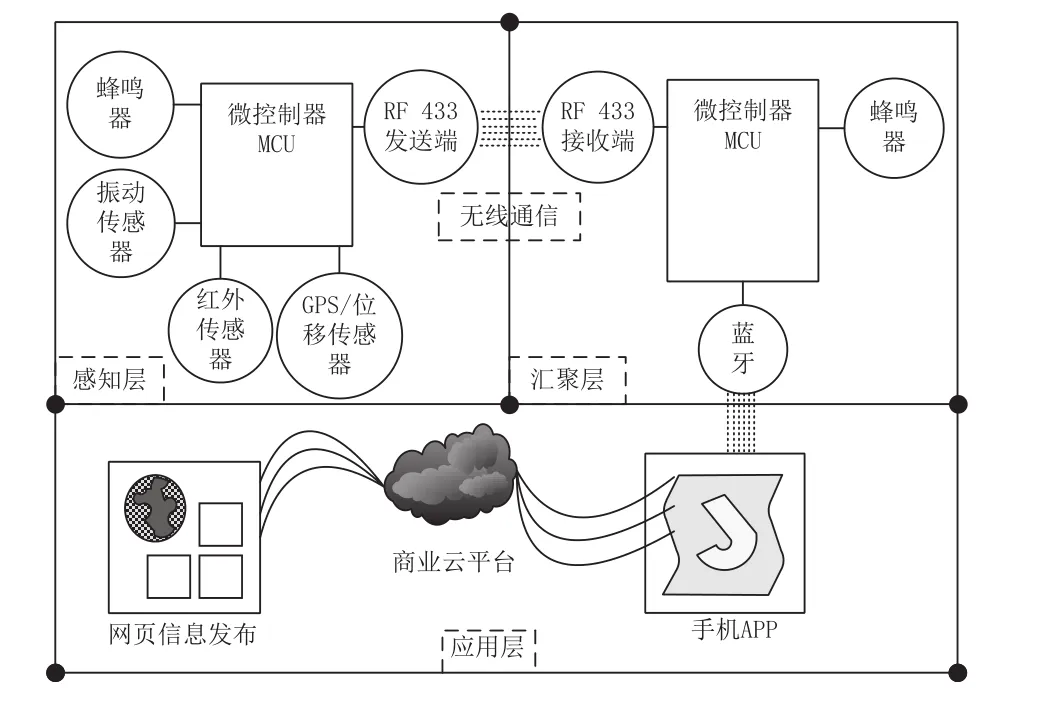
图1 系统框架结构图
2 系统验证与分析
为验证本系统的有效性,我们从实际使用环境出发,在不同条件的信号传输区域下(广场空旷区域、地下车库、室内、车流量较多的街道等)进行多次测试以及对各个传感器数据传输的时效性及准确性、无线射频及蓝牙的传输质量和不同环境下传输极限距离、应用层APP的实时数据更新情况稳定度和判断等级的准确性等方面进行多次测验及数据记录。
2.1 各个部分功能测试分析
(1)多传感器采集分析数据测试。通过对单一模块的测试,借助串口调试助手,将红外、振动传感器作为触点,一旦触发红外、振动传感器工作,MCU便通过串口向调试助手发送“不正常”信息,若未检测到传感器触发则MCU通过串口向调试助手发送正常指令。测试结果如图2所示。
(2)GPS定位信息数据测试。MCU通过发送读GPS信息指令即可返回GPS所采集的信息,此时MCU通过串口将读取的信息传输到调试助手,在串口助手中显示GPS所采集的数据信息,包含经纬度信息,时间信息;此外把第一次数据作为基准,当定位信息发生变化,会迅速发送“dangerous”报警。数据测试结果如图3所示。

图2 传感器测试数据
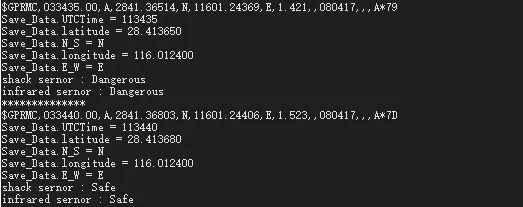
图3 GPS定位测试数据分析
(3)RF无线射频之间传输测试数据,需借助PC端串口调试助手。配置图1中,RF无线射频通道等参数相同,连接RF 433发送端与串口CH340模块,实现RF 433与PC直连,通过串口调试助手控制RF 433发送信息以及观测RF 433接收的信息,记该装置为RF1装置,同样对汇聚层中的RF 433接收端做同样的操作,记该装置为RF2装置。
通过RF1广播发送“RF1-RF2测试”,观测RF2装置的串口助手显示窗口,接收到“RF1-RF2测试”便认为单向测试成功。同样通过RF2装置向外广播发送“RF2-RF1测试”,观测RF1装置的串口助手显示窗口,接收到“RF2-RF1测试”便认为双向测试成功。测试结果如图4所示。
图4 无线射频测试
(4)蓝牙与用户手机通信测试。借助手机蓝牙调试助手、PC端串口调试助手、CH340串口接口,配对蓝牙模块和手机端,通过连接CH340和蓝牙装置,借助串口调试助手模拟蓝牙收发功能,蓝牙模块向外发送“Bluetooth test”信息,观测蓝牙调试助手,显示串口为Bluetooth test”便视为导通。测试结果如图5所示。
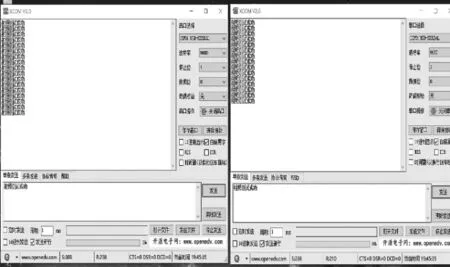
图5 蓝牙接收测试
2.2 整体功能测试分析
在不同的环境下,对系统的稳定性进行测试,系统环境分为空旷环境和信号盲区(地下车库)。测试了车辆处于这两种环境下,信息传输是否有所影响。
(1)空旷环境:整体测试的系统装置如图6、图7所示,配对手机与蓝牙模块,靠近车体和触碰车体,观测到APP显示的状态如图8所示。APP会根据预警情况显示经纬度,预警等级,初始状态,变化位置。经纬度在界面上方,界面中右侧显示预警等级,白色为一等预警,黄色为二等预警,红色为三等预警(图未显示),界面中红点为初始化位置,蓝点为变化位置,可寻导位置。系统测试正常,不受干扰。
(2)地下车库:系统安装同上,依次靠近车体、触碰车体以及移动车辆,观测到手机应用端数据依次发生变化,无干扰情况出现。信息接收频率和空旷环境下的情况一致。所得结论为系统测试正常,无盲区干扰。

图6 模拟车模型

图7 汇聚端模型

图8 初始状态的显示界面
3 结 语
本文从用户实际体验角度出发,在物联网大环境的推动下,建立了一整套可准确预防和智能持续追踪的体系。针对传统防盗系统的不足以及协同防盗市场的空白等问题,设计了一种智能的、应用型强的、用户可接受的非机动车协同防盗系统,实现了在无流量费用下持续协同的多等级预警智能防盗功能,有效解决了现有的单一传感器带来的虚警率高、用户后期对防盗系统维护费用高、在信号接收不灵敏区域的持续追踪等一系列问题。此外本系统进行了小部分功能扩展,还可应用到走失儿童定位追踪、贵重物品防盗、老幼看护、宠物防走失等领域。
[1]李铮,许又泉,汤神根,等.基于单片机的电动自行车无线防盗报警器[J].电子世界,2016(7)27.
[2]张培君.几款新颖实用的电动车防盗报警器[J]. 电动自行车, 2013(6):38-41.
[3]孙慧,孙凯,贾冰心,等.基于GPS与GPRS通信的车辆主动防盗报警系统[J]. 传感器世界,2012,18(7):29-31.
[4]刘一纬,张云飞,马千里.基于GPS和GSM的电动车防盗追踪报警系统[J]. 科学与财富, 2015(8):119.
[5]张皓.基于MSP430单片机和GSM模块的电动车防盗器设计[J].通讯世界, 2015(10):31-32.
[6]吴昌东.基于GPS与GPRS的嵌入式车载防盗系统的研究与开发[D].南京:南京理工大学,2014.
[7]刘云浩.物联网导论[M].北京:科学出版社,2011.
[8] 彭刚.基于ARM Cortex-M3的STM32系列嵌入式微控制器应用实践[M].北京:电子工业出版,2011.
[9] Carl J.Weisman.射频和无线技术入门[M].北京:清华大学出版社,2005.
[10]杨磊,梁活泉,张正,等.基于LoRa的物联网低功耗广域系统设计[J].信息通信技术,2017(1):40-46 .
猜你喜欢
装备制造技术(2020年11期)2021-01-26
军事文摘(2018年24期)2018-12-26
家庭影院技术(2018年10期)2018-11-02
家庭影院技术(2018年3期)2018-05-09
电子制作(2018年2期)2018-04-18
汽车维修技师(2018年10期)2018-03-14
玩具世界(2017年8期)2017-02-06
通信电源技术(2016年5期)2016-03-22
地矿测绘(2015年3期)2015-12-22
晚报文萃(2015年6期)2015-08-12
