
智能搏击教练机器人的设计
2018-06-29 06:00赵国飞边洪宁
物联网技术 2018年6期
赵国飞,边洪宁
(山东协和学院,山东 济南 250109)
0 引 言
2016年6月23日,国务院印发《全民健身计划(2016—2020年)》国发〔2016〕37号文,明确提出开展全民健身活动,推广武术、太极拳、健身气功等民族民俗民间传统和乡村农味农趣运动项目。同年7月26日,国家体育总局武术运动管理中心印发《中国武术发展五年规划(2016-2020年)》。据中国武术协会不完全统计,目前中国学习武术的人口超过6 500万,占世界总习武总人数的四分之一;现有武术馆、校、院、社1.2万余所,常年在武馆习武的人数达200万余人。如此庞大的群体是推动武术搏击产业发展的强大动力。在美国,搏击被公认是发展最快的体育产业。2000年终极格斗锦标赛UFC被娱乐大亨洛伦佐.菲尔蒂塔兄弟以200万美金买下,14年后UFC市值已超过18亿美金,市值翻了900倍[1]。
近年来,散打、拳击、跆拳道等武术搏击行业正处于飞速发展阶段,国内外搏击市场发展如火如荼。但调查发现,目前搏击行业在训练方面存在两大问题:
(1)即基本训练仍采用传统器械;
(2)雇用专业陪练价格不菲。
以上两大问题导致搏击训练效率较低及训练成本过高[2]。
针对上述问题,本文设计了一款智能搏击教练机器人(以下简称“智能教练”),该设计主要利用传感器技术和机械原理,以人形机器人的形式实现与训练者一对一的搏击训练陪练。该系统投入市场后,不仅会大大方便广大搏击运动员和搏击爱好者,同时还可创造可观的经济效益。
1 系统设计概述
本系统利用内置压力传感器监测搏击者的打击力度,将打击力度分为若干等级,各等级对应相应的语音回复。当机器人身体某部位的压力传感器监测到数值时,会根据各受压点的力度大小及位置判断当前搏击者的动作,通过驱动机械臂的直流电机做出简单出拳出腿等动作回应。各点的打击力度可在触摸屏上显示。同时,底座小轮在电机的驱动下使 “智能教练”进退自如,增强了灵活性和专业性。
系统包括两种模式,即对练模式与陪练模式。对练模式即模拟真实的擂台竞赛。对练模式下,“智能教练”将按搏击规则与使用者实战对练。此过程中“智能教练”的体能会随着比赛时间的推移及受到使用者的打击力度而下降,模拟真实搏击比赛过程中运动员因体力下降而出现的反应变缓,攻击力度减小等状况。
陪练模式用于日常训练。陪练模式下,“智能教练”只防守不进攻。它可借助底座轮子实现整体移动、躲闪,最大程度模仿搏击教练的动作。
为了实现系统的人机交互性,系统增加了语音播报功能、自动出击功能、显示功能、触摸屏选择训练模式等。
2 系统硬件设计
2.1 系统硬件概况
“智能教练”由橡胶人形靶及硬件电路两部分组成。人形靶是使用者直接击打的对象,主要包括人型机械架、击打点、机械臂(含2只手臂和1条腿)、驱动机械臂的直流电机和光电传感器。在人形靶的头、腹、腰部安装有压力传感器,机械臂驱动电机安装在人形靶的背部。橡胶人形靶的外型结构如图1所示。
硬件电路由CPU模块、AD数据采集模块、电源模块、显示模块和语音模块组成。系统功能结构如图2所示。
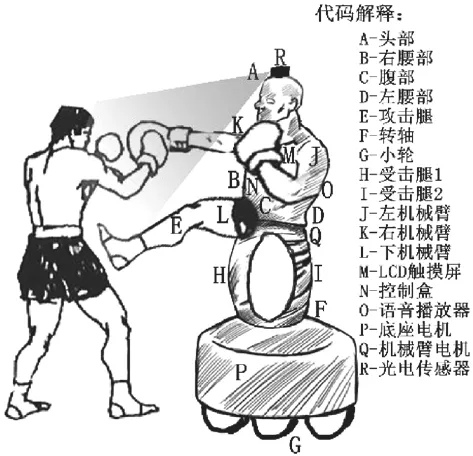
图1 智能搏击教练机器人外型结构图

图2 系统功能结构框图
光电传感器及头、腹、两腰的压力传感器相互配合,采集前方有无训练人及当前训练者的姿势等信息,传送给S3C2440。CPU根据训练者上一个动作状态控制电机,驱动机械臂模拟出拳出腿动作,同时,控制显示模块显示当前出击的力量等级,并通过语音模块播报相关信息。
光电传感器采集的光电信号通过光耦和CD4093芯片连接至CPU的I/O口。CPU通过CD4093芯片和光耦控制大功率MOS管IRF3205的导通和截止来控制电机。光耦的作用在于隔离开发板、光电传感器、电机[3]。
2.2 硬件电路设计
2.2.1 CPU模块
S3C2440基于ARM920T核心,0.13 µm的CMOS标准宏单元和存储器单元。ARM920T实现了MMU,AMBA总线和哈佛结构高速缓冲体系结构。这一结构具有独立的16 kB指令高速缓存和16 kB数据高速缓存。每个都由具有8字长的行组成。它采用了新的总线架构,如先进的微控制总线构架(AMBA),16/32位RISC体系架构和以ARM920TCPU为核心的指令集,拥有24个外部中断端口和130个复用输入/输出端口[4]。
指令、数据高速缓存,具备写缓冲和物理地址TAGRAM,可大大减少执行主存储器带宽和延迟性能的影响。同时还具有低功耗、简单、精致等优点,且全静态设计适合对成本和功率较敏感的应用。
2.2.2 数据采集模块
AD数据采集模块由传感器和ADC转换器组成。传感器主要包括压力传感器和光电传感器。
(1)压力传感器
该模块采用半导体压力传感器采集“搏击教练”被击打瞬间的压力数据。当“搏击教练”的传感器受到击打时,半导体晶体会产生一定的应力σ和应变ε,从而使得电阻值发生变化,通过该变化可计算出相应压力的大小。
采用MPX5100SERIES压力传感器。该传感器需要5 V直流电源供电,量程为100 kPa,对应的输出为0~5 V。AD转换器使用S3C2440内部的ADC转化器,为确保AD转换器能采集到更大范围压力传感器的输出压力,同时保证AD转换器能采集到微小压力的变化,故将压力传感器输出端经过一个由高精度电阻构成的分压电路后,传输给ADC转换器输入端,经实验验证,发现分压比例为5/6时效果最佳。分压电路原理如图3所示。

图3 高精度电阻分压电路原理图
(2)光电传感器
光电传感器采用扩散反射型光电开关,用于分析判断使用者的位置。将传感器的发光部分及收光部分装入“搏击教练”头部位置。当使用者在其攻击范围内时,传感器发出的光线被反射回来,传感器输出一个开关信号,CPU根据信号进行判断,发出控制指令。
光电传感器采用漫反射式光电开关,当被检测物体经过时,光电传感器便产生开关信号。光电传感器信号采集的有效张角范围为15°,采集距离范围为0~1.5 m,光电信号采集电路如图4所示。

图4 光电信号采集电路原理图
2.2.3 显示模块
本系统采用三星公司生产的3.4寸320×240分辨率TFT真彩超薄液晶触摸屏。S3C2440处理器的AD转换器ADC和触摸屏接口功能框图如图5所示。
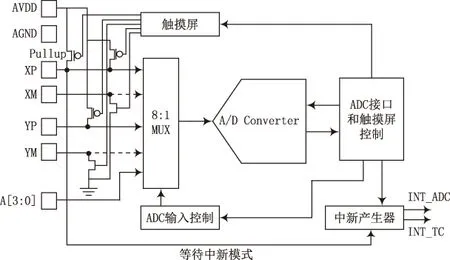
图5 ADC和触摸屏的接口功能框图
2.2.4 语音模块
该部分功能由专用语音芯片UDA1341来实现。首先编译UDA1341的驱动,所使用的编译工具为交叉编译器arm-1inux-gcc3.4.1,编译成功后将驱动文件下载到ARM开发板并将驱动挂载到系统,通过播放器播放各种mp3格式文件。
2.2.5 电机控制模块
电机控制电路如图6所示。该部分由CD4093、光耦4N26和大功率MOS管IRF3025组成。芯片CD4093的1,2脚和12,13脚分别与S3C2440处理器的30脚和28脚相连,分别控制模拟出拳、出腿。
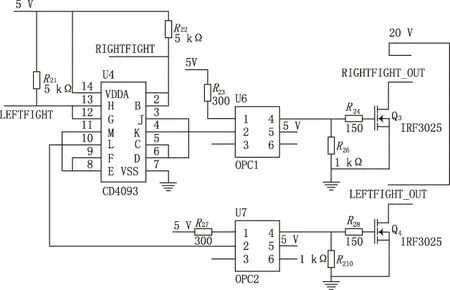
图6 电机控制电路原理图
2.2.6 程序设计
系统程序流程如图7所示。

图7 系统程序流程图
使用“搏击教练”时,首先需选择模式。选择“对练模式”时,程序启动控制“搏击教练”的底座万向轮并检测使用者位置的光电传感器。此时,光电传感器发射信号,程序判断传感器是否接收到来自使用者身体反射的信号,如果接收到信号,则说明使用者在其攻击范围内,否则继续发射信号检测,直至接收到信号为止。之后程序启动拳腿控制电机,发动攻击。同时,若压力传感器受到小于100 lb的打击力量,则程序播放“Try Again”语音;若受到的打击力量为200~300 lb,则程序播放“Great”语音;若受到的打击力量大于300 lb,则程序播放“Perfect”语音;至此,程序运行结束。
选择陪练模式,程序只启用压力传感器,检测打击力量并播放语音即可,无需启用底座万向轮和光电传感器。
3 软件设计与实现
一个嵌入式Linux系统从软件的角度,通常可分为四个层次,即引导加载程序、操作系统内核、文件系统、用户应用程序。
嵌入式系统软件是拳击娱乐系统开发的重点,其中包含AD数据采集模块、UI用户界面模块、主控模块、SQLite数据库模块、结果显示模块。
AD数据采集处理模块:采集击打点压力值,通过测力算法计算击打力量;结果显示模块:包括语言播报和LCD结果显示,该模块将AD数据采集模块计算得到的击打力量在显示屏显示并语音播报对应评价;自动出击模块:采集光电信号并在系统运行时随机模拟出拳;SQLite数据库模块:保存快速击打模式下,每次击打的详细数据,包括击打位置、力量大小和击打时间,为UI模块中的结果演示提供详细击打数据;UI用户界面模块:提供图形化用户界面,并以液晶触摸屏的形式实现系统与用户的交互。
一个完整的系统需要硬件和软件兼容结合,“智能教练”系统在充分考虑硬件和软件的实际情况下实现了智能搏击教练机器人的各项功能。
4 结 语
本文设计的智能搏击教练机器人可代替人工搏击教练,提高了专业搏击运动员的训练效率。该机器人最大的特色在于寓教于乐,使原本辛苦枯燥的搏击训练变得生动有趣。
[1]胡进,侯增广,陈翼雄,等.下肢康复机器人及其交互控制方法[J].自动化学报,2014,40(11):2377-2390.
[2]郑亚光.小型仿人搏击机器人的研究与设计[D].北京:中国矿业大学,2016.
[3]陈娟,李元,李万国. 基于B/S模式的嵌入式系统测试方法与实现[J/OL].电子技术应用,2016,42(2):50-52,56.
[4]张建军,杜莉.基于WSN和嵌入式系统的收割机智能监测优化设计[J].农机化研究,2017,39(9):66-70.
[5]殷松瑜.Qt/Embedded的安装配置和使用[J].物联网技术,2015,5(8):92-93.
[6]陈侃松,邵冲,张丹,等.基于S3C2440平台的USB-WiFi驱动移植[J].物联网技术,2015,5(5):34-35.
[7]罗怀杰.拳击对练与条件实战[J].搏击,2004(7):60-61.[8]徐歌.基于TMS320F2812的机器人控制系统的设计与实现[D].郑州:郑州大学,2012.
猜你喜欢
阅读(快乐英语高年级)(2022年10期)2022-11-08
阅读(快乐英语高年级)(2019年5期)2019-09-10
电子制作(2019年14期)2019-08-20
小学生优秀作文(低年级)(2019年6期)2019-07-01
电子制作(2019年9期)2019-05-30
小说界(2018年5期)2018-11-26
前卫文学(2016年3期)2016-07-01
