一种基于电磁流体的载人航天器人工重力方案研究
2018-06-28 11:43:24刘超镇于学文
载人航天 2018年3期
刘超镇,卢 山,于学文,孙 玥,耿 淼
(1.上海航天控制技术研究所,上海201109;2.上海市空间智能控制技术重点实验室,上海201109)
1 引言
现阶段载人航天飞行能达到的最远距离限于近地轨道以及短期登陆月球,飞行时间通常持续数天或几周,失重所产生的负面影响较小;但未来长期月球或更远距离星球载人探测飞行时间将大大延长,失重环境对航天员的健康影响不容忽视[1]。事实上,现有的失重对抗措施还没有完全被证明有效,不能为执行长期航天任务(时间大于3个月)的航天员提供充分的保护[2]。
人工重力是在载人航天器上通过对整体或部分进行稳定持续旋转或线性加速以模拟重力的作用,对失重生理效应进行防护的一种措施[2]。人工重力不是单独针对某个系统进行防护,而是再现地球重力环境对所有生理系统的刺激。作为一种高效的多系统长期失重对抗措施,人工重力的合理应用能有效解决骨丢失、心血管功能失调、肌萎缩、神经前庭功能紊乱、航天贫血和免疫功能下降等问题[3]。除对生理系统有益外,人工重力也可明显改善长期飞行的适居性,并且有利于个人卫生的保持,航天员也更容易开展每日的工作,是一项在轨综合性失重对抗措施[3]。
人工重力的产生主要有线性加速和旋转方式两种方法。以线性加速产生人工重力的方法主要依赖于推进系统工作,无法实现长时间1g重力需求[4]。以旋转方式产生人工重力主要有两种思路:一是基于短臂离心机产生间歇人工重力;二是基于长臂旋转航天器产生连续人工重力[5]。短臂离心机为达到1g人工重力,需要较高的转速,这将导致航天员运动病或方向紊乱症状明显。长臂旋转航天器则具有较长的旋转半径,因此转速相对较低。为了让航天员在太空尝试更长时间的驻留,基于长臂旋转航天器产生人工重力的方法更可行,且更能提供综合性防护。
从早期冯·布劳恩提出的车轮状空间站[6]到近期以载人登火为背景提出的刚性架构航天器[7]都采用航天器整体旋转的方式产生人工重力,但其旋转动力来自于推力器或核动力,存在以下缺点:
1)核动力技术难度大,存在安全风险。
2)环境干扰、航天员日常活动等产生的力矩会影响人工重力稳定性,这就需要推力器经常保持工作状态;对于数年的星际旅行来说,燃料预算较大,且频繁启动推力器容易引起挠性附件振动。
本文针对上述人工重力产生方式的不足,面向长期载人探测对连续人工重力环境需求,提出一种基于电磁流体驱动的载人航天器人工重力新方案,利用电磁驱动航天器转动,产生人工重力环境,克服传统方式振动大、燃料预算高等缺点。
2 人工重力方案性能指标参数
2.1 重力大小
人工重力加速度大小等同于作用于物体上的向心加速度,大小如式(1):

基于地面长期的离心机作用效果研究,俄罗斯科学家建议,对人类来说最小且有用的人工重力大约是0.3g,而0.5g的人工重力能够增强舒适感和各种正常表现[8]。 因此,本文针对0.3g、0.5g和1g开展设计以满足不同航天器约束下航天员对重力需求。
2.2 转速
科里奥利力在转速较低时影响可忽略不计,但在转速达到几rpm时就会产生不良影响,使简单的单腿移动变得困难[4]。因此,离心机或旋转航天器的最大转速须有所限制。科里奥利力大小可由式(2)表示[8]:

2.3 重力梯度
重力梯度描述的是航天员受到的重力大小与距离旋转中心长度的函数。考虑航天员身高为h,躺在半径为r的旋转航天器中,那么他头部的旋转半径为r⁃h。则头部和脚部承受的加速度的比值可表示为式(3):

若航天员身高h为2 m,旋转半径小于10 m,重力梯度将达到20% ~100%,人们会明显感觉到这个会使人呈弯曲姿势的重力梯度[4]。
2.4 舒适域
随着20世纪60年代载人航天飞行的开始,确定旋转环境的舒适标准一直在努力进行,期间公布了一些人工重力舒适度的指导方针[10⁃11],如图1所示。其中包括了假想的舒适域图,该图由重力大小、头脚方向重力梯度、转速和线速度的值确定。
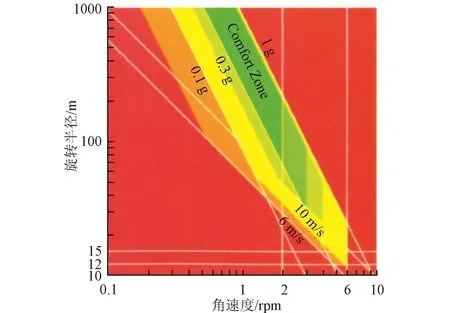
图1 重力大小与旋转半径、速度关系[11]Fig.1 Rotation rate as a function of the radius of ro⁃tation for four gravity levels[11]
早期研究指出舒适域是由最小半径12 m、最大重力1g、最小重力0.3g、最大转速6 rpm确定的区域[10]。但近些年的研究表明这些界限可能过于保守[12]。
3 电磁流体人工重力方案
3.1 系统组成
电磁驱动流体环内液体旋转,流体产生角动量,根据角动量守恒定律,流体与航天器间进行角动量交换。基于该原理,设计电磁流体驱动的人工重力方案:考虑流体环工作方式以及旋转稳定性,人工重力航天器主体结构为圆环状,如图2所示,由环形总体结构、人工重力生活舱、微重力实验舱、GNC系统、电源系统、电磁驱动系统、推进系统及其它辅助系统组成。

图2 电磁流体驱动的大型人工重力太空船Fig.2 Preliminary configurations of artificial gravity space vehicle
1)大型流体环
人工重力动力来源。是一个能够绕中心轴旋转的巨大圆环,内部腔体充有导电流体(如液态金属镓等)。在电磁场交互作用下,液态金属受洛伦兹力作用产生运动,根据角动量守恒,太空船反向运动。
2)生活舱
产生人工重力环境,为航天员提供生命保障、类地生活环境及设备仪器空间,四个生活舱沿中心轴对称分布。
3)电磁驱动泵
太空船人工重力的动力来源。通过驱动流体环内液体流动产生旋转角动量,且距离生活舱一定距离,以产生与地球环境近似的磁场。
本文重点在于电磁流体驱动产生人工重力这一创新途径,太空船其它分系统不再一一论述。
3.2 工作原理
电磁流体驱动的基本原理是:当导电液体中的载流子在电场中定向运动时,若受到和电场垂直方向的磁场作用,就会产生洛伦兹力,洛伦兹力反过来推动液体流动。如图3所示。

图3 电磁驱动基本原理图Fig.3 Operation principle of electromagnetic driver
磁流体驱动方式可以大体分为直流式和交流式。本项目考虑到整体重量、效率以及航天器电源情况,采用直流传导式驱动方式,其中磁场由永磁体提供。如结构图4所示,电磁场垂直作用于磁流体腔,流体腔内产生电磁力即安培力,进而推动流体沿管道循环流动。磁通密度和电流密度的矢积如式(4)所示,决定了作用在流体体积元上的力。


图4 电磁驱动泵结构简图Fig.4 Structural diagram of electromagnetic driver
当圆环内流体旋转运动后产生角动量,根据角动量守恒定律,流体环内液体角动量HL与太空船角动量HS之和为零,即HL+HS=O。由此可知,液体的转动使得太空船产生了旋转,即人工重力环境。
3.3 参数设计
参考舒适域环境关系(图1),选择比较舒适的区间,那么旋转速度应不大于4 rpm,旋转半径应不小于30 m。在此基础上,能够产生1g、0.5g、0.3g的最小半径为60 m。空间站舱段一般为25 t左右,本方案4个生活舱总重量设为100 t。其转动惯量I=mr2,角动量J=Iω。
1)1g参数设计
旋转速度取4 rpm,若在生活舱内产生1g的人工重力且满足舒适域区间,那么生活舱旋转半径应为56 m,则需要约1.3×108量级角动量。
2) 0.5g参数设计
与上述设计同等结构下,即取生活舱旋转半径为56 m,若在生活舱内产生0.5g的人工重力且满足舒适域区间,那么旋转速度应为2.8 rpm,则需要约9.1×107量级角动量。
根据舒适域区间约束,生活舱最小旋转半径为30 m,若在生活舱内产生0.5g的人工重力且满足舒适域区间,那么旋转速度应为3.8 rpm,则需要约3.7×107量级角动量。
3) 0.3g参数设计
取生活舱旋转半径为56 m,若在生活舱内产生0.3g的人工重力且满足舒适域区间,那么旋转速度应为 2.1 rpm,则需要约 6.8×107量级角动量。
取生活舱旋转半径为最小半径30 m,若在生活舱内产生0.3g的人工重力且满足舒适域区间,那么旋转速度应为3 rpm,则需要约2.8×107量级角动量。
4 人工重力设计结果分析
4.1 能耗分析
流体环剖面简化如图5,其中l为电磁驱动泵磁场作用区域长度,h为电场作用垂直距离,b为磁场作用垂直距离,等于内外半径之差,即rout-rin。

图5 流体环简化示意图Fig.5 Simplified diagram of the liquid loop
流体环内液体采用镓铟合金液态金属,流体环内液体流速为式(5)[14]:
式中,i为作用在液态金属上的电流,B为作用在液体金属上的磁场强度,D =2hb/h+b( )为水力直径,v为流体的动力粘度(温度303 K时,镓的 动 力 粘 度 为 3.49 × 10-7m2s-1), R =( rout+rin)/2为流体环平均半径,ρ为液态金属密度。 不考虑电极压降,直流电源电压为式(6)[14]:
稳态功率Pa=Uei。
针对 0.3g、0.5g 和1g 不同人工重力设计,从节约能量角度出发,选取所需角动量较小的组合,因此所选不同人工重力下结构尺寸及所需能耗参数如表1所示(磁场0.7 T)。
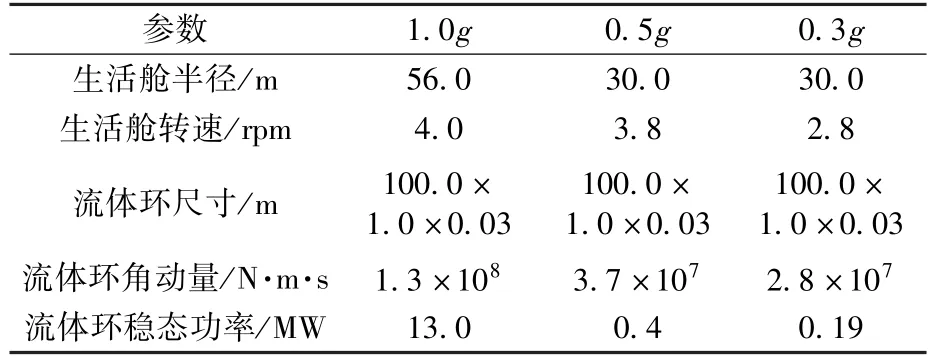
表1 不同人工重力的特性参数Table 1 Parameters of different levels of artificial gravi⁃ty
4.2 与传统方式对比分析
1)相比电机方式
设与电磁流体方案保持同等大小外形和质量,电机连接减速器后直接连接半径r=56 m的圆环运动,质量30 t,为产生1g人工重力(1.3×108Nm·s角动量),基于电机模型计算得出所需功率为700 kW。
流体环方式相对于电机方式在功率、重量方面优势并不明显,但产生如此之大量级角动量需要电机轮体体积较大,因此产生的振动、摩擦等也是难以接受的。流体环无大型机械驱动装置,可靠性较高;流量控制平滑,无振动,有利于人工重力环境的稳定性和舒适性。
2)相比推力方式
假设选择比冲为3000 N·s/kg的推进系统,单推力器力臂长为56 m,那么产生1g重力(1.3×108Nm·s角动量)所需推进剂约为800 kg。假设干扰力矩量级为1 Nm,那么维持人工重力每年的推进剂预算为200 kg。
除此之外,太空船飞行过程中受到常值干扰力矩的作用下,会影响人工重力的稳定性,因此需要周期性开启推力器以维持恒定人工重力。但对于长期深空载人探测来说,推力燃料属于不可再生资源。因此推力方式难以适用于长期载人深空探测活动。流体环方式以电力作为动力来源,具有无燃耗,降低成本;可长期重复使用,适用于星际载人活动等优点。另外,流体环产生的磁场可为生活舱提供防护场,模拟地球磁场环境,抵御空间辐射风险。
因此,对于短期载人航天活动,采用推力方式经济效益较高;但对于数年以上的深空载人探测活动来说,采用电磁流体环方式综合效益(经济性、人工重力稳定性、生理防护等)较高。
5 结论
本文提出的一种基于电磁流体驱动的太空船人工重力方案,其0.3g、0.5g和1g人工重力参数可以满足不同航天器尺寸与能耗约束下的需求。与传统电机方式、推力器方式对比表明,基于电磁流体驱动具有更高的可靠性、稳定性和舒适性,适用于星际载人活动。
[ 1 ] Clément G.Fundamentals of Space Medicine[M].Micro⁃cosm Press.El Segundo and Springer, Dordrecht, 2005:227⁃290.
[ 2 ] Kozlovskaya I B, Grigoriev A I, Stepantzov V I.Counter⁃measure of the negative effects of weightlessness on physical systems in long⁃term space flights[J].Acta Astronaut, 1995,36(8⁃12): 661⁃668.
[3] Paloski W H.Artificial gravity as a tool in biology and medi⁃cine[R].International Academy of Astronautics Study Group 2.2, 2006.
[4] Clément G, Burley A.Artificial Gravity[M].Microcosm Press and Springer, 2006: 38⁃39.
[5] Stone R W.An overview of artificial gravity[C]//the Fifth Symposium on the Role of the Vestibular Organs in Space Ex⁃ploration.Naval Aerospace Medical Center.Pensacola,EL.19⁃21 August 1970,NASA SP⁃314.pp 23⁃33.
[ 6 ] Clément G, Pavy⁃Le Traon A.Centrifugation as a counter⁃measure during actual and simulated spaceflight:A review[J].European journal of Applied Phvsiology,2004, 92:235⁃248.
[7] Joosten B K.Preliminary assessment of artificial gravity im⁃pacts to deep⁃space vehicle design[R].JSC⁃63743, 2002.
[8] Shipov A A,Kotovskaya A R,Galle R R.Biomedical aspects of artificial gravity[J].Acta Astronautica, 1981, 8: 1117⁃1121.
[9] Lackner JR,DiZio P.Adaptation in a rotating artificial gravi⁃ty environment[J].Brain Res Rev, 1998, 28(1⁃2): 194⁃202.
[10] Hall T W.Inhabiting artificial gravity[R].AIAA 1999⁃4524, 1999.
[11] Hall T W.Artificial gravity and the architecture of orbital habitats[J].Journal of the British Interplanetary Society,1999, 52: 290⁃300.
[12] Young L R, Hecht H, Lyne L E.Artificial gravity: head movements during short⁃radius centrifugation[J].Acta Astro⁃nautica, 2001, 49:215⁃226.
[13] 中国科学院力学研究所.液态金属电磁泵[M].北京:科学出版社, 1976:22⁃43.
Institute of Mechanics, CAS.Liquid Metal Electromagnetic Pump[M].Beijing: Science Press, 1976: 22⁃43.(in Chi⁃nese)
[14] Varatharajoo R, Kahle R, Fasoulas S.Approach for combi⁃ning spacecraft attitude and thermal control systems[J].Jour⁃nal of spacecraft and rockets, 2003, 40(5): 657⁃664.
猜你喜欢
科学大众(2022年23期)2023-01-30 07:04:16
大学物理(2022年8期)2022-09-15 05:35:44
国际太空(2022年7期)2022-08-16 09:52:50
海洋通报(2020年2期)2020-09-04 09:22:26
国际太空(2019年9期)2019-10-23 01:55:34
成长·读写月刊(2019年1期)2019-01-28 17:53:46
国际太空(2018年12期)2019-01-28 12:53:20
成都信息工程大学学报(2018年4期)2019-01-23 06:57:32
国际太空(2018年9期)2018-10-18 08:51:32
水利技术监督(2017年3期)2017-06-09 06:55:34