
第三轨供电方式下提高列车通过无电分区能力的方案
2018-06-27 09:43:12彭飞马力
城市轨道交通研究 2018年6期
彭 飞 马 力
(1. 昆明地铁运营有限公司, 650504, 昆明; 2. 昆明铁道职业技术学院, 650208, 昆明//第一作者,高级工程师)
受线路条件限制,采用第三轨供电方式时正线、折返线、存车线等有道岔的位置存在一定长度的无电区。列车在通过无电区时,受流器集电靴与第三轨之间会产生拉弧,进而灼伤第三轨端部弯头;同时,列车也会发生欠压、过压、过流等故障。不仅维护保养费用高,而且存在安全隐患。因此,有必要采取技术措施,提高第三轨供电方式下列车通过无电分区的能力。
1 列车通过无电区时的工况分析
采用第三轨供电的地铁列车通过无电区时的电路情况如图1所示。列车主电路中设置了中间直流充电电路。正常情况下,列车从第三轨取流,短接接触器KM1断开,预充电接触器KM2闭合,电流依次通过R1(充电电阻)、KM2、FL(电抗器),向FC(支撑电容)充电。FC充电完成后,KM1闭合,KM2断开,充电回路断开,直接向牵引逆变器供电。当列车进入无电区时,集电靴与第三轨端部弯头之间会剧烈拉弧烧伤,中间直流电压UC随着牵引逆变器的消耗而迅速下降。当UC低于牵引系统欠压保护门槛值Uth时,牵引系统上报欠压故障。
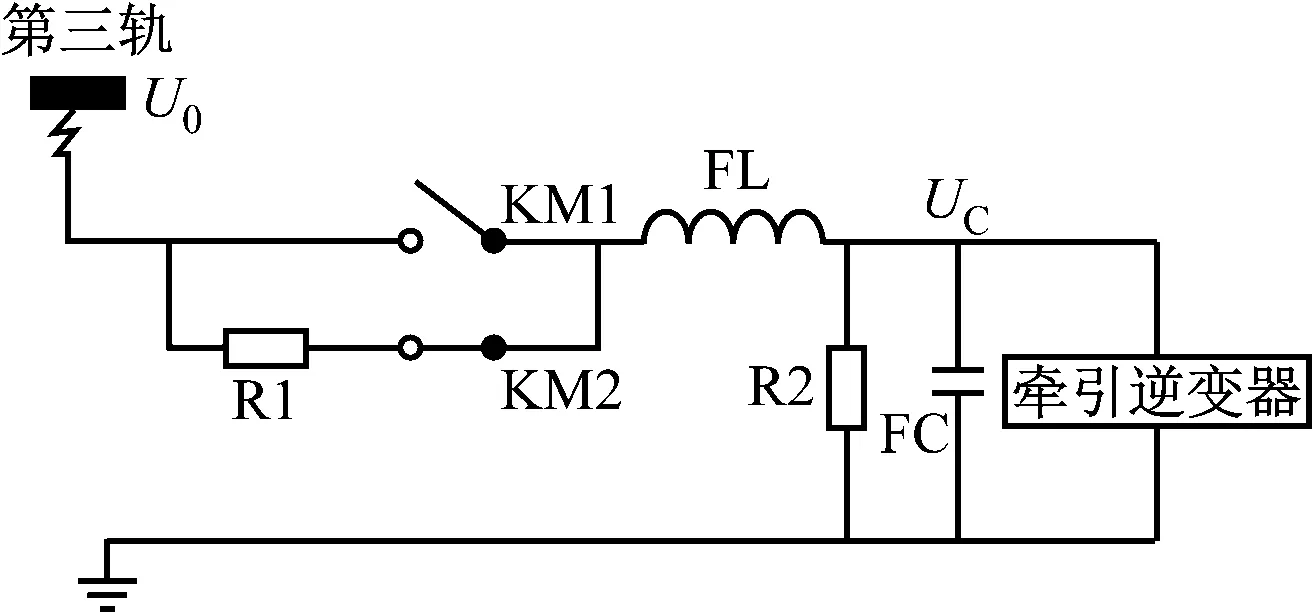
图1 采用第三轨供电地铁列车的电路示意图
如列车进入无电区到牵引系统保护所需的时间tp小于或等于列车通过无电区的时间tf,则牵引系统启动保护,断开KM1,辅助系统充电机也因欠压而停机,全车辅助系统及所有车载辅助设备均由XDC(蓄电池组)供电。列车重新进入有电区后,需完成消除电机磁场、主电路充电、建立电机磁场、建立电机转矩等一系列工作,才能恢复牵引能力。可见,列车恢复牵引能力耗时较久,甚至直接影响列车进站对标停车。而且,牵引系统频繁的保护动作也将损害相关电器元件的寿命, 降低系统的可靠性。
如果tp大于tf,则牵引系统不会进行保护,其各电器元件状态保持不变。当列车再次进入有电区间时,UC比网压U0小很多,电网电流将通过KM1、FL直接涌入FC,充电保护电路相当于失效,UC急剧上升,因LC振荡,中间电压可升至1 000 V以上。此时,牵引系统极易发生直流电流过流及直流电压过压等故障。一旦发生此类故障,高速断路器将立即跳断,辅助系统同样会失电。
综上所述,UC因网侧失电和逆变侧的消耗而快速下降,形成了较大压差,从而使列车在通过无电区时存在诸多问题。所以,消除压差是解决问题的关键。
2 提高列车通过无电分区能力的方案
2.1 方案比选
方案一:列车通过无电区时,司机手动分断主断路器。该方案增加了主断路器的动作次数,缩短了主断路器的使用周期,存在负载电路隔离不彻底,操作失误等风险。
方案二:在列车上增加受流器,将全车主回路贯通。昆明地铁3号线就采用了该方案。该方案会大幅增加生产及维修成本,不仅不能确保全车不会进入无电区,而且场内调车作业还存在窜电风险。
方案三:利用直接转矩控制算法快速响应的特点,确定列车进入无电区的准确位置,及时将列车动能转化为电能,产生预期的、恒定的、略低于网压的UC,并且保持UC在以辅助电源系统为负载的条件下的稳定性。昆明地铁1、2号线列车采用了直接转矩控制方式,使问题得以解决。但受列车、轨道线路、第三轨等综合条件的影响,列车进出无电区的具体位置是动态变化的,无法以某个具体位置来精确控制。
方案四:列车以自适应的方式进行恒定低电压制动后通过无电区。该方案不需硬件设备费用及二次投入的人力费用,不受受流器安装位置的限制,只需在对牵引主回路及逻辑控制上考虑电流涌入的保护,即可实时地自动调整,从而适应外部条件的变化。其在对列车及第三轨的保护上都具有很大优势。
由上述分析可见,方案四(恒定低电压制动控制方案)的优势较为明显,为最优方案。
2.2 恒定低电压制动控制方案论证
当列车只有1个单元失电通过无电区时,有:
WSR+WTC=WSC+WXH
式中:
WSR——列车驶入无电区时的初始动能;
WTC——仍能提供动力的动车所输出的能量;
WSC——列车通过无电区时输出的能量;
WXH——整列列车在无电区中因各类阻力、机械损耗及转换效率等消耗的能量。
此时,辅助系统能取电,不需能量补足,主要依靠WTC就能使列车正常通过无电区。
当列车全车失电通过无电区时:
WSR=WSC+WXH+WFZ
式中:
WFZ——整列列车辅助系统消耗的能量。
此时,只要保证WSR就能使列车正常通过无电区。
以上两种情况,均可采样UC作为反馈,利用列车再生制动的基础条件和直接转矩控制的优点来把控恒定低电压制动投切的时机,通过控制牵引电机电制动力来获得预设且稳定的UC。
首先,必须确定进入恒定低电压制动状态时电机的转速、转矩范围以及电制动力的限制范围。这是判断列车进入和退出恒定低电压制动模式的前提条件。
2.2.1 进入恒定低电压制动模式的条件
恒定低电压制动模式是为了让列车可靠通过无电区。在实际运用中,条件最复杂、最困难的无电区就是在运营线两端的折返线。因此,只要列车能可靠通过两端折返线,就能满足正线的需求。
经分析,列车进入恒定低电压制动模式需满足以下条件:
(1) 根据实际情况,确定UC的正常值,明确辅助系统对UC的需求。选取进入恒定低电压制动模式的动作电压门槛值Umin作为判断依据之一。只有UC低于Umin时,才允许列车进入恒定低电压制动模式。
(2) 根据实际情况,确定中间直流电流的最小变化量。选取进入恒定低电压制动模式的动作电流门槛值Imin作为判断依据之一。只有中间直流电流变化量在1个信号周期内大于Imin时,才允许列车进入恒定低电压制动模式。
(3) 确定UC变化率的门槛值。只有UC变化率大于门槛值时,才允许列车进入恒定低电压制动模式。
(4) 设列车2个单元都掉入无电区时的列车最小初速度为vmin。只有初速度大于vmin时,才允许列车进入恒定低电压制动模式。
(5) 区分列车进入无电区时的工况。在制动工况下,首先应满足制动需求,不叠加低电压制动,确保冲击值不超限;在惰行工况时,列车不进入恒定低电压制动模式;列车仅在牵引工况时才能进入恒定低电压制动模式。
只有当上述条件全部满足时,列车才能进入恒定低电压制动模式。此外,还要考虑再生制动对UC的反馈速度等诸多因素,以精准控制列车恒定低电压制动模式的投切时机。
2.2.2 退出恒定低电压制动模式的条件
(1) 恒定低电压制动产生的UC低于第三轨电压值。设定动作电压Umax,当检测到UC大于Umax时,列车退出恒定低电压制动模式,恢复正常工作状态。
(2) 为避免恒定低电压制动时间过长导致列车停车,或是网侧电压不稳导致恒定低电压制动不能及时退出,设定恒定低电压制动模式的最长工作时间tmax。当恒定低电压制动模式工作时间大于tmax时,列车自动回到正常状态。
以上两个条件,只要满足其中一个,列车都必须退出恒定低电压制动模式,以确保其及时回到正常状态。
2.3 方案实施及验证
按照恒定低电压制动方案的思路,对牵引包的逻辑控制及列车网络控制进行调整,并在昆明地铁1、2号线多列列车上进行调试、试验和参数比选,从而对方案的正确性、可行性和稳定性进行验证。试验列车的牵引电机为18边型直接转矩控制的交流异步电机。试验的主要技术指标如表1所示。
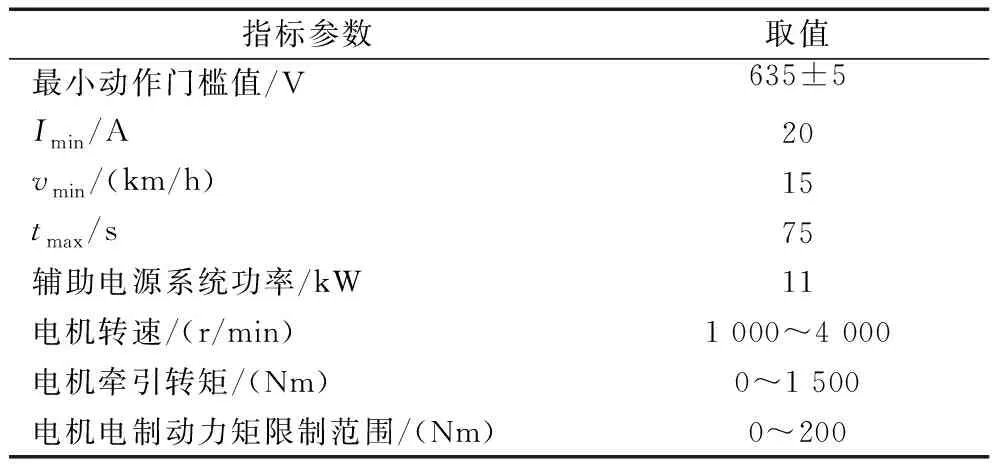
表1 恒定低电压制动方案试验的主要技术指标
图2是所测列车从有电区→无电区→有电区过程的完整实测电压波形图。由图2可以看出:无电区内的中间直流电压可以精确地稳定在680±5 V以内;从实际进入无电区到控制器完全进入恒定低电压制动状态用时20 ms,从实际进入无电区到中间直流电压被控制到预设值用时100 ms,从实际进入有电区到控制器完全退出恒定低电压制动状态用时25 ms;进入恒定低电压制动状态的过程中,电压波动幅度较小,快速稳定,速度平稳地略微变慢;退出恒定低电压制动状态的过程中,电压无过冲等异常,快速稳定,速度能平稳地恢复。
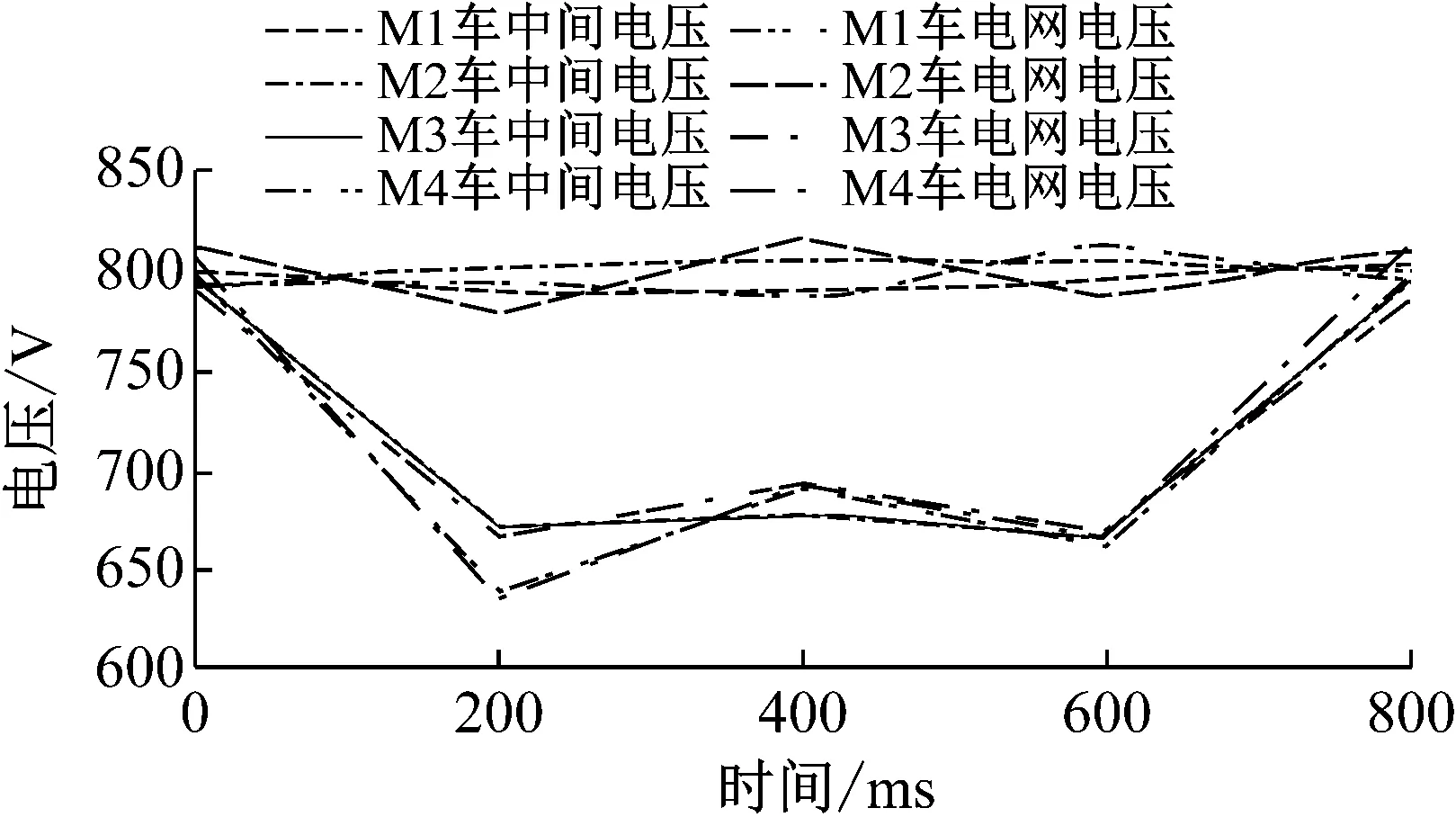
图2 列车实测电压波形图
3 结语
由上述分析及实例验证结果可见,恒定低电压制动技术稳定可靠、控制精度高,能够适应复杂的实际工况,满足列车技术需求,有效避免了列车通过无电区时易发生的欠压、过压、过流、第三轨端部弯头烧损等故障。该技术已运用在昆明地铁1、2号线共45列列车上。根据运营情况计算,可使每列列车节约上百万元的新造和维修成本,还可为每条线路每年节约数十万元的第三轨维修材料。
[1] 胡育文,黄文新,张兰红,等.异步电机直接转矩控制系统[M].北京:机械工业出版社,2012.
[2] 徐绍龙,倪大成,刘良杰,等.地铁列车无电区微制动技术的研究与应用[J].机车电传动,2013(1):30.
[3] 汪国梁.电机学[M].北京:机械工业出版社,2005.
[4] 彭飞,李家宇,韩春芳,等.电客列车检修[M].成都:西南交通大学出版社,2015.
[5] 袁伟,杨振宇,王涛,等.变电检修[M].成都:西南交通大学出版社,2015.
[6] 王桂梅,陈宝德,李建文,等.信号检修[M].成都:西南交通大学出版社,2015.
猜你喜欢
小资CHIC!ELEGANCE(2019年40期)2019-12-10 09:12:42
四川冶金(2018年1期)2018-09-25 02:39:26
小小艺术家(2017年8期)2018-01-26 13:15:10
电子制作(2017年1期)2017-05-17 03:54:27
通信电源技术(2016年1期)2016-04-16 04:57:26
电测与仪表(2015年9期)2015-04-09 11:59:38
电机与控制应用(2015年3期)2015-03-01 03:49:59
电测与仪表(2014年7期)2014-04-04 12:09:30
机械制造与自动化(2014年1期)2014-03-01 04:21:41
电力工程技术(2012年5期)2012-03-25 10:40:39
