
基于北斗卫星导航系统的汽车智能限速系统的研究
2018-06-25 08:16李量宇于淼尧泮泽锌
汽车实用技术 2018年11期
李量宇,于淼尧,泮泽锌
(长安大学汽车学院,陕西 西安 710064)
引言
随着汽车行业迅速发展,交通事故发生率也在逐渐上升。据统计,在众多导致死亡交通事故的原因中,超速“名列前某”。与此同时,北斗事业发展迅速,北斗导航技术在交通运输、林渔业、电信、测绘、气象等方面日益普及,北斗导航系统的实用性备受青睐。根据国内外统计资料,道路交通事故的成因中,超速行驶和车辆纵向间距不够占有较高的比重,两类合计占到交通事故成因的18%以上。目前,市面上有多种汽车限速系统,且在一定程度上减少了交通事故的发生。经研究发现,传统的汽车限速系统只是针对一台车,而没有使车与车之间建立联系,因此存在不能根据实时路况限制车速的弊端,一定程度上限制了限速系统的灵活性和智能化发展。本文从将北斗卫星定位与汽车限速结合的角度出发,不仅可以实时测量车辆的行驶速度,还可通过北斗卫星定位系统实时测量前后车的间距,并在车速超过道路限速或者两车行驶的安全距离的情况下,发出声光警告,提示汽车驾驶员降低车辆行驶速度。在警告发出后若驾驶员没有在规定时间内采取减速措施,该系统会主动降低车速。
1 系统框架
本系统基于北斗导航定位系统,通过车载传感器采集信息、主控芯片处理信息以及执行机构采取措施等实现汽车的主动限速。

图1 系统总框架
2 系统功能介绍
图1给出了系统总工作流程框图,下面结合各部分功能,论述系统工作流程。
2.1 车速检测与控制
图2 中,为了检测和控制车速,需要通过安装在汽车上的北斗导航定位装置接收道路限速信息,以此作为判断是否超速行驶的基本依据。车速检测与控制装置用于实时检测车辆行驶速度和自动实施车速控制。
2.2 车距检测与控制
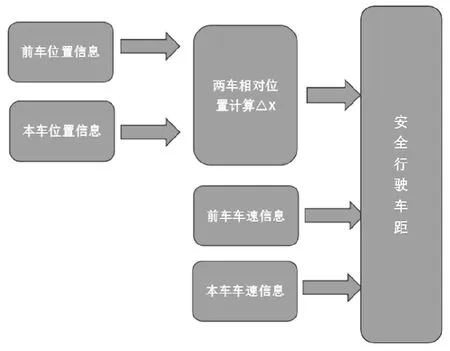
图3 安全行驶车距计算流程图
图3中,为了计算安全车距,在车上设置车距信号处理单片机,并由GSM作为车辆位置信号的接收和发送装置,车距的控制是通过降低车速的方式间接实现增大车间距离的目的。同时,在车内设置的车距检测与控制装置,用于实时检测车辆行驶速度、计算安全车距和实施车距控制。
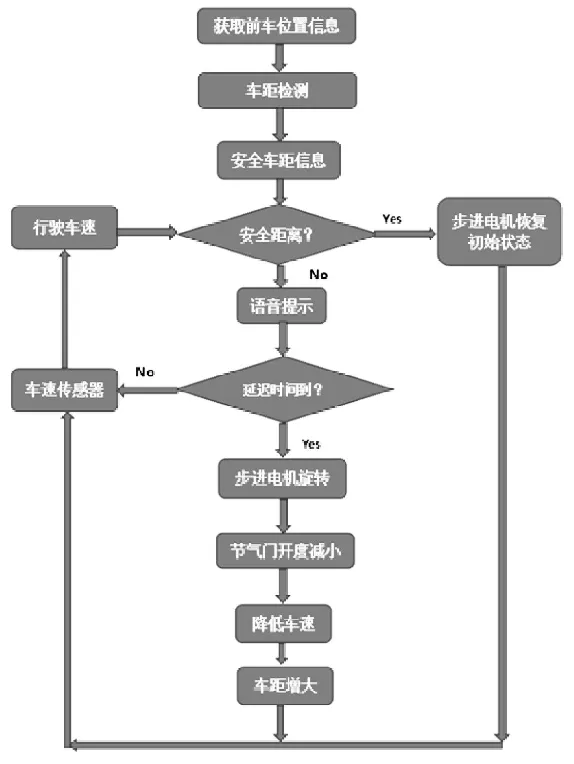
图4 车距检测与控制流程图
车速控制系统与车距控制系统中,对延迟时间的设定比较关键。通过研究分析,设定的限速控制延迟时间为 5s,车距控制延迟时间为 1s。
2.3 车辆定位信息的接收/发送
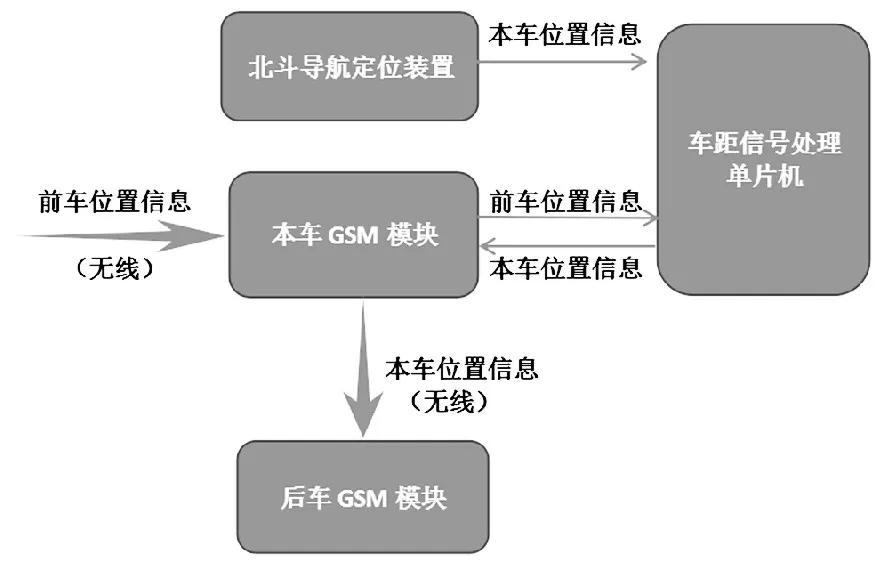
图5 GSM无线传输流程图
GSM无线传输流程图如图5所示,本系统的GSM模块接收前车发来的车辆位置信息,然后有线传输给车距信号处理单片机处理,车距信号处理单片机将得到的车距信息传给下一处理器,而将本车的车辆位置信息借助GSM模块无线传输给后车,由后车相同的GSM模块接收,这样后车就可以获取来自前车的位置信息。
3 结语
随着每年汽车保有量的增加,道路变得更加拥挤,为保障人们的安全出行,对行驶车速的限制显得尤为重要。本文提出了一种基于北斗导航的智能限速系统,从车辆周围环境的角度出发,利用北斗卫星出来的道路限速信息和定位信息,通过车与车之间的联系,将车距作为限速的依据之一,从而将实时路况的一部分加入到汽车限速系统中来,进一步提升了汽车限速系统的可靠性,这对于汽车智能化和网联化的发展具有重要意义。
[1] 史顺玉.基于北斗卫星导航系统的智能车载终端设计[D].青岛:中国海洋大学,2014.
[2] China Satellite Navigation Project Center.Compass/Beidou Naviga tion Satellite System Development[R]. Beijing: CSNPC,2009.
[3] FENG Y, LI B.A Benefit of Multiple Carrier GNSS Signals: Regi onal Scale Network-based RTK with Doubled Inter-station Distan-ces[J].Spatial Science,2008.
[4] 汪翼舟.基于北斗的车载定位系统的设计[D].武汉:武汉邮电科学研究院,2016.
[5] 陈倩诒,陈再清.汽车自动限速系统设计[J].计算机测量与控制,2006.
猜你喜欢
百科探秘·航空航天(2022年6期)2022-06-28
小哥白尼(神奇星球)(2022年3期)2022-06-06
当代陕西(2019年18期)2019-10-17
计算机与数字工程(2019年4期)2019-05-07
汽车维修与保养(2019年1期)2019-05-05
汽车电器(2018年12期)2019-01-04
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
太空探索(2016年12期)2016-07-18
太空探索(2016年3期)2016-07-12
