
4UGS2型双行甘薯收获机的研制
2018-06-21 09:29徐文艺李青龙秦喜田李维华郭大勇
农业工程学报 2018年11期
李 涛,周 进,徐文艺,李青龙,张 华,秦喜田,李 娜,李维华,郭大勇
(山东省农业机械科学研究院,济南 250100)
0 引 言
中国是世界上最大的甘薯生产国,种植面积及产量均居世界首位,根据世界粮农组织统计,常年种植面积约占世界甘薯种植面积的 56%,年总产量约占世界总产量的 80%,在国内是仅次于水稻、小麦和玉米的第四大粮食作物[1-3]。尽管中国是甘薯作物生产大国,但甘薯机械化生产水平与发达国家相比,还落后很多,尤其是劳动强度大、需要人工多的收获作业,严重制约着甘薯产业的发展。目前,发达国家甘薯机械化收获以联合收获为主,收获机械运用了大量的高新技术,如采用振动、液压技术进行挖掘,采用气压、气流、光电技术进行碎土和分离,采用传感器技术控制挖掘深度、甘薯传运量以及分级装载,利用微机进行监控操作等。
目前,国内薯类收获机械以小型为主,动力要求不高,收获效率相对国外机械较低,功能单一,适合在小地块作业,市场上很少有大中型产品。甘薯收获机多采用马铃薯收获机上的一些成熟技术进行设计生产,没有根据甘薯自身生长状况,找出适合甘薯收获的最佳方法。同时,精准农业技术与智能化装备研究在国内还处于起步阶段。推动现代信息技术、生物技术、农业科学、液压电子控制技术在农业装备上的广泛应用是今后一段时间的重点[4-8]。
因此市场迫切需要研制出一种工作稳定可靠、明薯率高、伤薯率低、生产效率较高的宽幅甘薯收获机械,同时提高甘薯收获机械的智能化水平,把液压技术、传感器信号采集技术和微处理器控制技术等糅合到甘薯收获作业实践中。
为此,本文采用掘起物减堵设计,研究设计一种适用于两行作业的甘薯收获机,以解决壅土堵塞和杂草缠绕问题,提高工作效率;采用两级土薯分离装置,以进一步提高土薯分离效果;采用自动对行装置,运用电液技术使挖掘位置始终对准垄的中间位置;采用自动挖深调控装置,有效地实现收获机挖掘深度的精确控制。同时进行田间试验,以对比设计机型和传统机型在不同试验条件下明薯率、伤薯率、破皮率、可靠性和生产率等各项性能指标。
1 整机结构及主要技术参数
1.1 整机结构
4UGS2型双行甘薯收获机,主要由机架及牵引和地轮装置、切土装置、挖掘装置、压草轮装置、土薯分离输送装置、传动系统和电控系统等部件组成。机架及牵引和地轮装置其地轮与机架相对位置可以调整,以改变土薯分离装置工作角度;切土装置用于切开土壤及薯秧杂草,以防壅土和缠草;挖掘装置可绕固定轴旋转,以改变挖掘深度;压草轮装置可及时反向排出通过挖掘铲的茎叶及杂草;土薯分离输送装置用于物料的分离和输送;传动系统由拖拉机提供动力,动力经机架前传动轴连接座、机架后变速箱总成传递到土薯分离输送装置[9-13];电控系统包括自动对行装置和自动挖深调控装置,自动对行装置和自动挖深调控装置可实时准确地控制挖掘机构的挖掘位置和挖掘深度。整机结构图如图1所示。
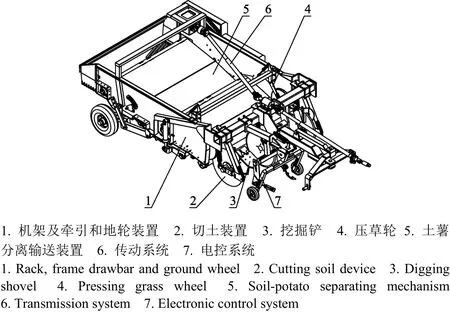
图1 4UGS2 型甘薯收获机结构图Fig.1 Structure diagram of 4UGS2 type double-row sweet potato harvester
1.2 主要技术参数
4UGS2型甘薯收获机与拖拉机的连接方式为牵引式,其主要技术参数如表1所示。
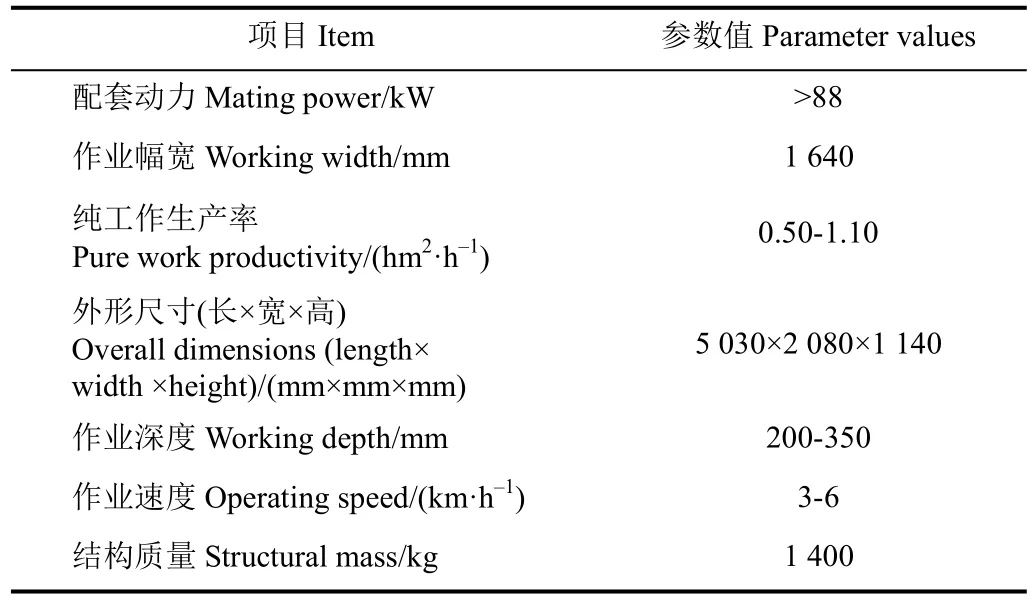
表1 4UGS2 型甘薯收获机主要技术参数Table 1 Technical parameters of 4UGS2 sweet potato harvester
2 主要部件设计
2.1 挖掘机构及自动挖深调控装置
2.1.1 挖掘机构设计
甘薯收获机挖掘部件的主要性能指标是能否以最少的铲土量挖掘薯垄、捡拾薯块、松碎土壤,在克服阻力的基础上消耗最少的能量,并将铲起物传送到分离机构上[14-16]。甘薯体形大、质量大、生长深、结薯范围宽的自身生理性状决定了其机械化收获的难度。与马铃薯相比,甘薯平均质量超过250 g,生长深度约20~28 cm,这就要求甘薯收获机挖掘深度要大于30 cm,并能根据结薯深度和地面状况进行挖掘深度的调整,同时整机功率消耗要增大,挖掘部件强度要增大。挖掘机构及自动挖深调控装置结构如图2所示。

图2 挖掘机构及自动挖深调控装置结构示意图Fig.2 Structure diagram of digging mechanism and automatic digging control mechanism
多铲片组合式挖掘部件因制造互换性和作业性能上的优势而得到广泛应用,但组合式挖掘铲片大多以整体横梁为支撑,铲片间隙处横梁所造成的迎土面,会阻断土壤顺畅流动,并造成秧茎或杂草搭缠,从而导致作业阻力增大,引起掘起物拥堵[17]。4UGS2型甘薯收获机挖掘机构采用弯管下支撑式组合挖掘铲,即弯管前端连接挖掘铲,后端焊接在轴套上,轴套空套在机架下部固定轴上,可有效避免铲片间隙处的迎土面,并消除了挖掘铲或其支撑横梁与机架侧板的连接,减少了触土部件及迎土面,减轻了掘起物的拥堵问题。同时,挖掘铲采用前伸结构,机架侧板工作时有一定的离地高度,减轻了其迎土面与土壤存在的正面推压,同时配合有切土装置和压草轮装置,可及时切开土壤和防止茎杆回缠,有效降低工作阻力,防止挖掘铲堵塞。
挖掘铲采用平面铲结构,单垄配三把铲刀,其受力图如图3所示。挖掘铲的水平倾角α的理论值可由图中对掘起物作用力的平衡方程式(1)~(2)确定。

式中T为铲面对掘起物的摩擦力,N,T=f R,f为土壤对铲的摩擦系数。由式(1)、(2)得式(3)。

α 增大有利于破碎土块,但铲的工作阻力将增加,由于挖掘机构有挖深调控功能,即挖掘铲根据地面状况可绕固定值旋转,挖深可变范围为220~380 mm,相应的α角变化范围为21°~30°,挖掘铲的防堵设计可保证挖掘角度在数值变化较大时挖掘效果变化不大,同时大挖掘角度可以使土块进一步被压碎。挖掘铲的总长度可由式(4)确定。

式中l为挖掘铲的总长度,mm;取h1=200 mm;V为机器前进速度,m/s,取V=1.4 m/s;φ为土壤对钢的摩擦角,一般φ取30°~36°。根据对平面铲的研究,当α取值范围为21°~30°时,挖掘铲的最佳长度为350~400 mm。根据甘薯收获条件与机具结构特点,最终取l=375 mm。
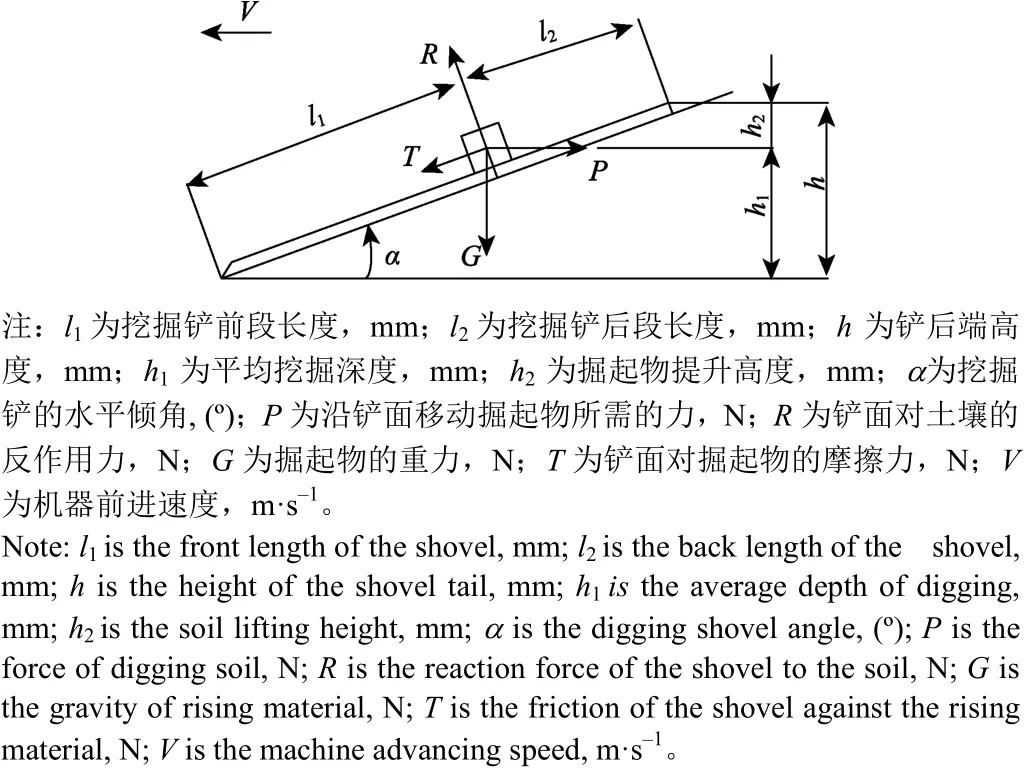
图3 挖掘铲受力示意图Fig.3 Force analysis of digging shovel
防石栅铰接在挖掘铲上,单片挖掘铲配两片防石栅。防石栅在挖掘铲工作时与其在一个平面上,可有效增大挖掘深度;当收获机下部有石块通过挖掘铲与升运链间隙或者升运链有石块回带时,防石栅可绕其连接销向上翻转,从而使挖掘铲与升运链之间间隙增大,以防止石块堵塞损坏挖掘铲和升运链。
铲刃张角γ 的大小必须使茎秆和杂草能沿刃口滑切。其取值必须适中,如果过大,茎秆和杂草便不能被切断,引起挖掘铲堵塞;过小时,铲的强度和刚度都要降低,则必须增加铲的长度,这样工作阻力将增大。铲刃张角γ 一般为 80°~100°。考虑到甘薯收获挖掘深度较大,对铲齿强度要求较高,同时单垄配 3把铲刀的结构可以取较大的铲刃张角,取铲刃张角γ =100°。
2.1.2 自动挖深调控装置设计
国内大多数中小型薯类收获机都采用了固定式的挖掘部件,挖掘深度调整不方便,不能根据地面状况实时调整挖掘深度,传统仿形方法不能较好的适应薯类收获机的仿形要求,存在压实土壤、破坏仿形地表的“伪仿形”现象,造成挖土量增加,分离部件的负荷加重的情况,严重影响了土薯分离效率,并使牵引拖拉机功率消耗增加[18-20]。在实践生产中薯类收获机对挖掘铲深度控制的仿形装置主要有 2种:一种采用垄顶上的滚轮,即限深轮来控制;一种是通过改变挖掘机具的悬挂角度来改变挖掘铲的入土深度。前一种方法存在压实土壤、破坏仿形地表的“伪仿形”现象,造成挖土量增加,分离部件的负荷加重的情况。后一种方法属于机械仿形中的半自动仿形,这种方法能较大范围的对挖掘深度进行调整,但是其调整过程不方便,不能进行实时仿形。
本机型对薯类收获机挖掘深度控制的仿形装置和控制系统进行深入地研究,研制出一种收获机挖掘深度仿形自动控制系统,仿形轮在垄沟内工作,不压实垄上土壤,挖掘深度可根据地面状况自动调整,解决收获机在作业过程中“伪仿形”和实时仿形问题。
如图2所示,4UGS2收获机自动挖深调控装置,包括地面仿形控制机构、挖掘机构和液压控制机构组成,其中地面仿形控制机构包括机械仿形机构和电子控制机构。启动自动挖深调控装置开始收获时,机械仿形机构前仿形轮5可以绕支撑横轴7旋转,在回位弹簧3作用下,贴紧地面,以实现地面高低状况自动仿形,支撑横轴7轴端安装有角位移传感器6,根据支撑横轴7角度的变化可探测收获机的行进路线的高低变化和和变化量的大小,控制器根据自动检测控制机构输出的支撑横轴 7偏移量角度参数,输出液压电磁阀控制信号,驱动液压油缸6的动作,液压油缸6带动挖掘机构固定轴1旋转,改变挖掘铲齿 8的离地高度,保证快速准确地调整挖掘作业的深度,有效地实现收获机挖掘深度的精确控制。
自动挖深调控装置与自动对行装置的电子控制机构共用控制器与显示屏。控制器为自主设计开发,供电电压10~36 V,采用TMS320F28335芯片,支持32位高精度浮点运算,运算频率150 MHz,包括DSP控制、RS232通信、I/O输入与输出、模拟量输入与输出等模块,可直接驱动电磁换向阀;显示控制部分采用搭载迪文 DGUS系统的 7.0英寸高亮触控屏,分辨率 800×480,友好的图形交互界面可实时设置控制参数和显示工作状态;检测传感器均选用RTY090LVEAX角位移传感器,防护等级IP67,12位分辨率,可测量–45°~45°范围,将角度变化转换为 0.5~4.5 V线性电压信号输出,防护性能好检测精度高。
2.2 土薯分离输送装置
土薯分离输送装置分为两级,安装在机架左右两侧板之间,两级土薯分离输送装置都配备有张紧机构,一级土薯分离输送装置前导向轮上安装有刮泥板装置,二级土薯分离输送装置安装有三头抖动轮装置[21-24]。土薯分离输送装置结构如图4所示。
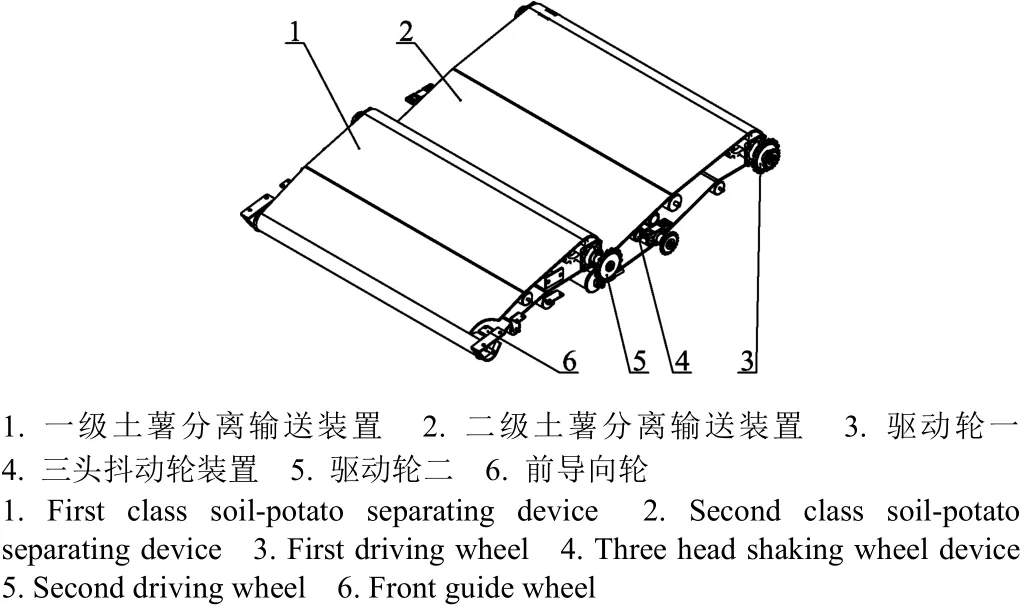
图4 土薯分离输送装置结构示意图Fig.4 Structure diagram of soil-potato separating mechanism
由拖拉机动力输出轴提供动力,动力经传动轴总成、变速箱总成传递到土薯分离输送装置驱动轮和三头抖动轮上,甘薯在第一级土薯分离装置上受摩擦力作用进行去土作业,在第二级土薯分离装置上由于抖动轮的作用,土垡被进一步的疏松、破碎,去土后的甘薯随第二级土薯分离装置输送到集拢装置,继而掉落在地面上。
2.2.1 土薯分离输送装置线速度
土薯分离输送装置在工作时,为减小对薯块的损伤,同时避免壅土,其线速度与机器前进速度要有正确的配比关系[25]。国外田间和实验室试验表明:分离输送装置的线速度为1.2~2.0 m/s时,分离效率高;超过2.0 m/s后,分离效率降低。若机器前进速度为 VP,一级分离输送装置线速度为Vr1,则有式(5)。

式中λ为速度系数,其取值一般为0.8~2.5。甘薯收获机为了获得较高的生产率较好的收获质量,其速度一般为3~7 km/h,即0.83~1.94 m/s,由于甘薯收获机挖掘深度较大,为了保证掘起物顺畅通过,设计一级分离输送装置线速度为1.79 m/s。掘起物经由第一级输送分离装置薯土分离后,进入第二级输送分离装置时,含土率相对较低,其线速度可相应降低,但由于甘薯皮比较薄,速度降低会造成甘薯在分离机构上停留时间加长,增加破皮率,所以第二级分离机构速度也不能过低,设计第二级输送分离装置线速度为1.77 m/s。
2.2.2 三头抖动轮装置参数分析
三头抖动轮装置为主动型,可以根据不同的土壤状况调整抖动轮转速,改变升运链抖动频率,提高土薯分离效果和降低甘薯的破损率。抖动轮装置结构形式主要有圆形、双头形和三头形3种[26]。3种抖动轮分别适用于不同黏度及含水率的土壤,圆形抖动轮可在干松的沙质土壤环境中使用,在潮湿或黏重土壤中收获时可采用双头、三头轮增加升运链的抖动频率,提高土薯分离效果。
决定抖动强度的主要因素是抖动轮头数、振幅、转速和升运链的松紧程度。振幅和升运链的松紧程度可由固定在机架上的把手调节,振幅调整范围 10~40 mm,振动幅度直接影响土薯分离效果及薯块的破损程度,振幅越大,分离效果越好,但薯块的破损率随之增高。
抖动轮工作时,应能保证物料抛起为基本条件,以达到更好的土薯分离效果。把物料看作是具有一定质量的质点,质点是沿圆弧AB做圆周运动,质点受到的作用力为重力mg、离心力P1、法向反力R1和摩擦力T1,受力如图5所示。
当物体离开升运器的一瞬间,R1=0,T1=0,即离心力P1的垂直分力 P2大于物料的重力 mg,为此,应满足式(6)。

式中P1为离心力,N;P2为离心力P1的垂直分力,N;β为二级土薯分离升运角;ω为角速度,rad/s;r为抖动轮作用半径,m;m为质点质量,kg;g为重力加速度,9.8 m/s2。

式中 n1为抖动轮转速一,r/min;式(7)为抛起物块时抖动轮的最低转速,带入原始数据计算得 n1>100.75 r/min。

图5 三头抖动轮上物料受力示意图Fig.5 Force analysis of material on three head shaking wheel
在振幅一定的情况下,抖动轮频率是一个影响土薯分离效果的重要参数,频率增加时,甘薯块茎碰撞力增大,同时其碰撞次数减少但更均匀,块茎脱泥效果好;但频率过大会造成块茎碰撞力超过碰撞损伤力,引起伤薯率增加。参考国内外薯类收获机抖动轮频率设计和试验数据,考虑到试验基地土壤状况,设计采用三头抖动轮装置,其频率取值范围为 9~11 Hz。抖动轮转速可由式(8)确定。

式中n2为抖动轮转速二,r/min;Z为抖动轮的头数,可得抖动轮转速为n2= 180~220 r/min>n1,抖动轮转速满足设计要求。
2.3 自动对行装置
目前甘薯作物主产区大量采用垄作方式,收获机械需要对行收获,尤其在挖掘作业时,对设备自动对行的作业要求较高。挖掘作业时若挖掘铲前进方向出现偏差,就会漏挖、少挖,还需要人工再次挖掘,损失大、作业效率低。收获机驾驶员为了对行行走,需不时调整前进方向,不仅驾乘操作人员劳动强度高,且对行作业准确性易受人为因素影响,难以保证收获作业效果和效率[27-30]。因此,自动对行挖掘收获技术是提高甘薯作物收获机械自动化水平和作业性能的关键所在。
近几年,国内对薯类等根茎类作物收获机自动对行装置也有一定的研究,大都是通过导向机构与作物的轮廓接触获得偏转信息,受作物的生长状况影响较大,适应性和可靠性还需要进一步的验证。对行装置结构复杂,造价成本较高,仅仅停留在研究探索阶段,也是影响其推广的重要原因。薯类自动对行装置的技术难点在于导向方式的设计以及控制系统的设计。
4UGS2型双行甘薯收获机自动对行装置,以垄行截面走向为研究对象,包括自动检测控制机构、牵引机构和液压控制机构组成,其中自动检测控制机构包括机械对行探测机构和电子控制机构。在机械对行探测机构左右连接架上各安装一个角位移传感器6,传感器触杆5前端安装有弧形探测板7。启动自动对行控制系统开始收获时,弧形探测板 7与垄侧面接触,控制器根据自动检测控制机构输出的垄侧面偏移量角度参数,输出液压电磁阀控制信号,驱动液压油缸3的动作。液压缸3带动牵引座2的左右移动,使挖掘位置始终对准垄的中间位置,实现薯类收获机的自动对行功能。自动对行装置结构图如图6所示。

图6 自动对行装置结构图Fig.6 Structure diagram of auto-follow row device
3 田间试验
3.1 试验条件
2017年10月在山东省农业机械科学研究院章丘市枣园镇甘薯试验基地进行了田间收获试验,试验基地土壤类型为褐土,其生产性能较好,适应性宽,保水保肥,是山东省较好的一种土壤类型。单垄垄距为800 mm、收获时垄高200 mm,垄长长度大于100 m,品种为济薯26和北京553,垄播株距约为300 mm,结薯深度为200~300 mm,薯蔓平均长度为2 600 mm。试验前采用人工割除方法进行藤蔓收获作业,保证试验顺利进行。4UGS2型双行甘薯收获机配套动力为雷沃1504拖拉机,功率为110 kW。样机和田间试验情况如图7。

图7 样机和田间试验Fig.7 Prototype and field experiment
3.2 试验方法
参照国家农业行业标准《NY/T1130-2006马铃薯收获机械》规定和有关农业机械试验方法,在甘薯垄播旱地进行收获试验。由于今年是第一轮样机试制试验,所以没有安装电控系统,即自动对行装置和自动挖深调控装置不进行性能验证,试验按拖拉机前进速度7.02 km/h (即1.95 m/s)、5.02 km/h (即 1.40 m/s)和 3.27 km/h (0.91 m/s)等 3种状态进行,其输送分离装置一级分离输送装置线速度为1.79 m/s,第二级输送分离装置线速度为1.77 m/s。测定甘薯收获机纯工作小时生产率、明薯率、伤薯率、破皮率、可靠性等 5个指标,考查机架及牵引和地轮装置、切土装置、挖掘装置、压草轮装置、土薯分离输送装置和传动系统等各部件及整机的性能[31-33]。
3.3 试验结果与分析
4UGS2甘薯收获机在不同试验条件下,取得的试验结果如表2所示。

表2 不同试验条件下4UGS2型甘薯收获机的主要性能指标Table 2 Main performance index of 4UGS2 sweet potato harvester under different test conditions
试验结果表明:该机型对土质湿润、板结较少的垄作旱地适应性较好,其切土装置、挖掘装置、压草轮装置、土薯分离输送装置和传动系统等部件工作性能良好,明薯率、伤薯率、破皮率、可靠性和生产率等各项指标均接近或达到了合格要求,同时拖拉机前进速度是影响收获质量的一个重要指标。拖拉机前进速度提高时,其明薯率降低,伤薯率升高,破皮率降低,生产率提高,可靠性变化不大。拖拉机行驶速度较高时,虽然生产率提高了,但由于单位时间内进入土薯分离输送装置的物料增加,土薯分离不彻底,造成了明薯率降低和伤薯率升高;由于进入第二级分离装置的物料较多,减轻了甘薯与分离链的摩擦,因而破皮率降低。拖拉机行驶速度较低时,虽然明薯率升高和伤薯率降低,但由于单位时间内进入土薯分离输送装置的物料减少,在二级分离机构的末端会造成甘薯与分离输送链的加剧磨损现象,导致破皮率急剧增加。拖拉机前进速度为5.02 km/h(1.40 m/s)时,一级分离输送装置线速度为1.79 m/s,第二级输送分离装置线速度为1.77 m/s时,其明薯率、伤薯率、破皮率、可靠性和生产率分别达到了97.40%、1.85%、1.83%、95%和0.80 hm2/h,其性能指标符合要求,拖拉机前进速度与土薯分离装置速度配比关系较好。
拖拉机前进速度和土薯分离装置速度是影响收获质量的重要因素,其线速度的大小和配比关系值得深入研究。同时两级土薯分离装置速度配比关系也尤为重要,
本轮试验两级分离装置采用了近似相等的线速度,在下一轮试验时,可以通过进一步优化两级土薯分离装置速度配比,提高作业质量。
3.4 4UGS2型甘薯收获机与传统机型主要性能指标对比
传统机型是市场上销售的两行甘薯收获机,其挖掘铲齿采用整体式结构,无压草轮装置,土薯分离输送装置采用一级输送结构,抖动轮采用被动式结构,无自动对行装置和自动挖深调控装置。在上述相同的试验条件下,选取 2台机型的最佳工况,对比传统机型和设计机型的主要性能指标,验证其各部件及整机的可靠性能。表3为其主要性能指标对比试验数据。性能对比试验表明,由于4UGS2型双行甘薯收获机的挖掘机构和土薯分离输送装置采用了优化设计,其各项性能指标优于传统机型,设计机型的明薯率比传统机型的明薯率提高了6.23个百分点,伤薯率降低4.11个百分点,破皮率降低3.11个百分点,生产率比传统机型高

表3 4UGS2型与传统机型主要性能指标比较Table 3 Comparison of performances of 4UGS2 type and traditional model
0.19 hm2/h。从对比试验的结果可以认为4UGS2型双行甘薯收获机的各项性能指标能够达到甘薯收获的要求,并且比传统机具更适合北方土质松软、板结较少的垄作旱地甘薯收获。
4 结 论
1)挖掘机构的防堵设计可有效保证土壤顺畅流动,减轻秧茎或杂草搭缠,从而降低作业阻力;两级土薯分离装置和主动型抖动装置设计可以保证更有效的土薯分离效果。当土薯分离装置速度稍大于拖拉机前进速度且两级土薯分离装置速度大小相近时,其明薯率、伤薯率和破皮率分别达到了97.40%、1.85%和1.83%,性能指标符合收获机作业质量评价技术规范要求。
2)4UGS2型甘薯收获机幅宽 1 640 mm,纯工作时间生产率为0.50~1.10 hm2/h,可一次完成甘薯的挖掘、土薯输送分离、薯块后铺放等工作,降低了劳动强度,提高了工作效率。
3)田间试验表明:其整机及各部件工作性能良好,拖拉机前进速度和土薯分离装置速度配比关系的优化可以进一步提高收获质量,设计机型的明薯率比传统机型的明薯率提高了6.23个百分点,伤薯率降低4.11个百分点,破皮率降低3.11个百分点,生产率提高0.19 hm2/h,其整机性能和可靠性指标满足设计要求。
[1] 马代夫,李强,曹清河,等. 中国甘薯产业及产业技术的发展与展望[J]. 江苏农业学报,2012,28(5):969-973.Ma Daifu, Li Qiang, Cao Qinghe, et al. Development and prospect of sweetpotato industry and its technologies inChina[J]. Jiangsu J. of Agr. Sci., 2012, 28(5): 969-973.(in Chinese with English abstract)
[2] 刘庆昌. 甘薯在我国粮食和能源安全中的重要作用[J]. 科技导报,2004(9):21-22.Liu Qingchang. Importance of sweet potato in the security offood and energy in China [J]. Science & Technology Review, 2004(9): 21-22. (in Chinese with English abstract)
[3] 蒋玉峰,马代夫. 国家甘薯产业技术体系建设推动甘薯产业和学科发展[J]. 江苏师范大学学报,2016,34(3):23-27.Jiang Yufeng, Ma Daifu. The sweetpotato of China agricultural research system promotes the industrilization and disciplinary development of sweetpotato[J].Journal of Jiangsu Normal University, 2016, 34(3): 23-27. (in Chinese with English abstract)
[4] 胡良龙,胡志超,谢一芝,等. 我国甘薯生产机械化技术路线研究[J]. 中国农机化, 2011(6): 20-25.Hu Lianglong, Hu Zhichao, Xie Yizhi, et al. Study on the route of mechanization of sweet potato (Ipomoea batatas Lam)production technology in China[J]. Chinese Agricultural Mechanization, 2011(6): 20-25. (in Chinese with English abstract)
[5] 魏忠彩,李学强,张宇帆,等. 马铃薯全程机械化生产技术与装备研究进展[J]. 农机化研究,2017, 39(9):1-6.Wei Zhongcai, Li Xueqiang,Zhang Yufan, et al. Reviews on technology and equipment of potato production[J]. Journal of Agricultural Mechanization Research, 2017, 39(9): 1-6. (in Chinese with English abstract)
[6] 王公仆,蒋金琳,田艳清,等. 马铃薯机械收获技术现状与发展趋势[J]. 中国农机化学报,2014,35(1):11-15.Wang Gongpu, Jiang Jinlin, Tian Yanqing, et al. Presentstatus and prospects of mechanical potato harvest technology[J].Journal of Chinese Agricultural Mechanization, 2014, 35(1):11-15. (in Chinese with English abstract)
[7] 单爱军,刘俊杰,崔冰冰. 马铃薯收获机现状与发展趋势[J]. 农机化研究,2006,28(4):19-20.Shan Aijun, Liu Junjie, Cui Bingbing. The present situation of potato harvester and its development trends[J]. Journal of Agricultural Mechanization Research, 2006, 28(4): 19-20.(in Chinese with English abstract)
[8] 胡良龙,田立佳,计福来,等.国内甘薯生产收获机械化制因思索与探讨[J].中国农机化,2011(3):16-18.Hu Lianglong, Tian Lijia, Ji Fulai, et al. Analysis and discussionon the restriction causations for harvesting mechanization of sweet potatoin China[J]. Chinese Agricultural Mechanization, 2011(3): 16-18. (in Chinese with English abstract)
[9] 吕金庆,田忠恩,杨颖,等. 4U2A型双行马铃薯挖掘机的设计与试验[J]. 农业工程学报,2015,31(6):17-24.Lü Jinqing, Tian Zhongen, Yang Ying, et al. Design and experimental analysis of 4U2A type double-row potato digger[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(6): 17-24. (in Chinese with English abstract)
[10] 戚江涛,蒙贺伟,李成松,等. 马铃薯收获机的设计与研制[J]. 农机化研究,2018,40(2):124-127.Qi Jiangtao, Meng Hewei, Li Chengsong, et al. The design and development of potato harvester[J]. Journal of Agricultural Mechanization Research, 2018, 40(2): 124-127.(in Chinese with English abstract)
[11] 赵达,王士军,李学强,等. 侧输出马铃薯收获机设计研究[J]. 农机化研究,2016,38(8):101-104.Zhao Da, Wang Shijun, Li Xueqiang, et al. Structural design and calculation of side output potato harvester[J]. Journal of Agricultural Mechanization Research, 2016,38(8): 101-104.(in Chinese with English abstract)
[12] 魏宏安,王蒂,连文香,等. 4UFD-1400 型马铃薯联合收获机的研制[J]. 农业工程学报,2013,29(1):11-17.Wei Hongan, Wang Di, Lian Wenxiang, et al. Development of 4UFD-1400 type potato combine harvester[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2013, 29(1): 11-17. (in Chinese with English abstract)
[13] 胡良龙,田立佳,胡志超,等. 4GS-1500 型甘薯宽幅收获机的研究设计与试验[J]. 中国农机化学报,2013,34(3):151-154.Hu Lianglong, Tian Lijia, Hu Zhichao, et al. Research design and test of 4GS-1500 type wide sweet potato harvester[J].Journal of Chinese Agricultural Mechanization, 2013, 34(3):151-154. (in Chinese with English abstract)
[14] 王建波,樊敲洲,田延庆,等. 马铃薯挖掘机关键部件的研究现状与展望[J]. 农机化研究,2011,33(1):244-248.Wang Jianbo, Fan Qiaozhou, Tian Yanqing, et al. Research status and prospects of the key parts of potato digger[J].Journal of Agricultural Mechanization Research, 2011,33 (1):244-248. (in Chinese with English abstract)
[15] 邓伟刚,王春光,王洪波,等. 马铃薯收获机挖掘铲工作阻力影响因素分析与研究[J]. 农机化研究,2016,38(9):53-58.Deng Weigang, Wang Chunguang, Wang Hongbo, et al.Analysis and research on influence factors of potato harvester digger shovel working resistance[J]. Journal of Agricultural Mechanization Research, 2016, 38(9): 53-58. (in Chinese with English abstract)
[16] 杨然兵,李国莹,尚书旗,等. 机械化挖掘收获部件发展现状与展望[J]. 农机化研究,2008,30(9):5-8.Yang Ranbing, Li Guoying, Shang Shuqi, et al.Research advances and prospects of mining mechanical harvesting parts[J]. Journal of Agricultural Mechanization Research,2008, 30(9): 5-8. (in Chinese with English abstract)
[17] 刘宝,张东兴,李晶. 马铃薯收获机主要问题机理分析及其对策[J]. 农机化研究,2009,31(1):14-16.Liu Bao, Zhang Dongxing, Li Jing. Mechanism analyses and countermeasures on the main problems of potato harvester[J].Journal of Agricultural Mechanization Research, 2009, 31(1):14-16. (in Chinese with English abstract)
[18] 吕凯英,廖宇兰,益爱丽,等. 木薯收获机挖掘铲挖深控制系统设计[J]. 农机化研究,2018,40(2):100-105.Lü Kaiying, Liao Yulan, Yi Aili, et al. Design of automatic depth-control system for digging blade of cassava harvester[J].Journal of Agricultural Mechanization Research, 2018,40(2):100-105. (in Chinese with English abstract)
[19] 李承志,郭秀华,郑立新,等. 挖深自适应元葱收获机的设计与应用[J]. 农机化研究,2009(12):96-99.Li Chengzhi, Guo Xiuhua, Zheng Lixin, et al. The deepadaptable onion harvesting machine designing & application[J].Journal of Agricultural Mechanization Research, 2009(12): 96-99. (in Chinese with English abstract)
[20] 李彦晶,魏宏安,孙广辉,等. 4U-1400FD型马铃薯联合收获机挖掘铲的参数优化[J]. 甘肃农业大学学报,2011,45(5):132-136.Li Yanjing, Wei Hongan, Sun Guanghui, et al. Parameters optimization on digging blade of 4U-1400FD potato combine harvester[J]. Journal of Gansu Agricultural University, 2011,45(5): 132-136. (in Chinese with English abstract)
[21] 吕金庆,李世柱,李国民,等. 马铃薯挖掘机升运器的设计研究[J]. 农机化研究,2004,26(4):108-111.Lü Jinqing, Li Shizhu, Li Guomin, et al. Design and research of elevator of potato excavator[J]. Journal of Agricultural Mechanization Research, 2004, 26(4): 108-111. (in Chinese with English abstract)
[22] 吕金庆,孙贺,兑瀚,等. 粘重土壤下马铃薯挖掘机分离输送装置改进设计与试验[J]. 农业机械学报,2017,48(11):146-155.Lü Jinqing, Sun He, Dui Han, et al. Design and experiment on conveyor separation device of potato digger under heavy soil condition[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(11): 146-155. (in Chinese with English abstract)
[23] 王兴东,文怀贤,曾镛,等. 马铃薯收获机升运带块茎运动碰撞分析[J]. 农机化研究,2018,40(2):29-33.Wang Xingdong, Wen Huaixian, Zeng Yong, et al. Analysis of movement and impact of tubers on elevator belt of potato harvest[J]. Journal of Agricultural Mechanization Research,2018, 40(2): 29-33. (in Chinese with English abstract)
[24] 王彦军. 4M-2型马铃薯联合收获机分离输送系统的研究[D]. 兰州:甘肃农业大学,2007.Wang Yanjun. Research on Separating and Conveying System of the 4M-2 Potato Combine Harvester[D]. Lanzhou: Gansu Agricultural University, 2007. (in Chinese with English abstract)
[25] 耿端阳,张道林,王相友,等. 新编农业机械学[M]. 北京:国防工业出版社,2015.
[26] 王福义. 4U-2 型马铃薯收获机被动式抖动轮结构形式探讨[J]. 农业科技与装备,2011(6):61-62.Wang Fuyi. Discussion on the structure of passive vibrating wheel of 4U-2 type potato harvester[J]. Agricultural Science& Technology and Equipment, 2011(6): 61-62. (in Chinese with English abstract)
[27] 吴惠昌,胡志超,彭宝良,等. 牵引式甜菜联合收获机自动对行系统研制[J]. 农业工程学报,2013,29(12):17-24.Wu Huichang, Hu Zhichao, Peng Baoliang, et al.Development of auto-follow row system employed in pulltype beet combine harvester[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE),2013, 29(12): 17-24. (in Chinese with English abstract)
[28] 王申莹,胡志超,吴惠昌,等. 基于 Proteus 的甜菜收获机自动对行控制系统设计与仿真试验[J]. 中国农机化学报,2014,35(3):35-40 Wang Shenying, Hu Zhichao, Wu Huichang, et al. Design simulation and test of auto-followrow control system employed in beet harvester based on Proteus[J]. Journal of Chinese Agricultural Mechanization, 2014, 35(3): 35-40.(in Chinese with English abstract)
[29] 杨然兵,尚书旗,王家胜,等. 根茎类作物收获机械自动对行技术的研究[C]//中国农业工程学会 2011年学术年会论文集. 北京:中国学术期刊电子出版社,2011:1-5.Yang Ranbing, Shang Shuqi, Wang Jiasheng, et al. Research on auto-follow row technology employed in root-tuber crops Harvester[C]//. The Chinese Society of Agricultural Engineering in 2011 Academic Essays. Beijing: China academic journal electronic publishing house, 2011: 1-5. (in Chinese with English abstract)
[30] 王方艳,张东兴. 圆盘式甜菜收获机自动导向装置的参数优化与试验[J]. 农业工程学报,2015,31(8):27-33.Wang Fangyan, Zhang Dongxing. Parameter optimization and test on auto guide device for disc type sugar beet harvester[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(8): 27-33. (in Chinese with English abstract)
[31] 全国农业机械标准化技术委员会.文献著录:第 4部分.非书资料:NY/T 1130-2006[S]. 北京:中国标准出版社,2006:7.
[32] 夏阳,何玉静,王万章,等.分段红薯机械化收获模式实验研究[J]. 中国农机化,2011(6):70-72,69.Xia Yang, He Yujing, Wang Wanzhang, et al. Experiment on themultiple steps mechanized sweet potato harvest[J]. Chinese Agricultural Mechanization, 2011(6): 70-72, 69. (in Chinese with English abstract)
[33] 崔功佩,杨然兵,尚书旗,等. 马铃薯二级输送分离装置伤薯试验研究[J]. 农机化研究,2018,40(12):170-175.Cui Gongpei, Yang Ranbing, Shang Shuqi, et al.Experimental study on damaged potato of secondary conveying and separating device[J]. Journal of Agricultural Mechanization Research, 2018, 40(12): 170-175. (in Chinese with English abstract)
猜你喜欢
农机使用与维修(2022年2期)2022-02-21
中国农村科技(2021年12期)2021-12-28
湖北农机化(2021年11期)2021-12-07
保鲜与加工(2021年1期)2021-02-06
———2020 款中农博远玉米收获机值得期待
河北农机(2020年1期)2020-01-11
河北农机(2020年2期)2020-01-08
贵州农机化(2019年3期)2019-11-05
贵州农机化(2019年1期)2019-05-21
今日农业(2019年16期)2019-01-03
贵州农机化(2018年2期)2018-08-28
