直接空冷机组协调控制系统及给水泵RB试验动态特性分析
2018-06-19 00:56袁俊文宿海涛国恩东
东北电力技术 2018年3期
袁俊文,宿海涛,国恩东,刘 娟
(1.国网黑龙江省电力有限公司电力科学研究院,黑龙江 哈尔滨 150030;2.国网辽宁省电力有限公司电力科学研究院,辽宁 沈阳 110006)
国投晋城热电厂一期2×300 MW 机组控制系统采用北京日立控制系统有限公司的 HIACE-5000M分散控制系统,其协调控制采用 DEB方式,并且将负荷指令、DEB-TFF的微分以及主汽压偏差作为前馈信号。机组在RB发生时DEB协调控制系统能自动将机组负荷迅速降到还在运行的辅机所能承受的目标负荷值,并控制机组在允许参数范围内继续运行而不停炉。
1 DEB协调控制系统[1-3]
直接能量平衡(DEB)协调控制系统是一种以能量需求和能量释放为控制信号的控制系统。将能量平衡信号和锅炉燃烧释放的热量作为锅炉主控的输入信号。该协调控制系统以前馈控制为基础,是一种锅炉跟随的控制系统。DEB协调控制系统组态如图1所示。
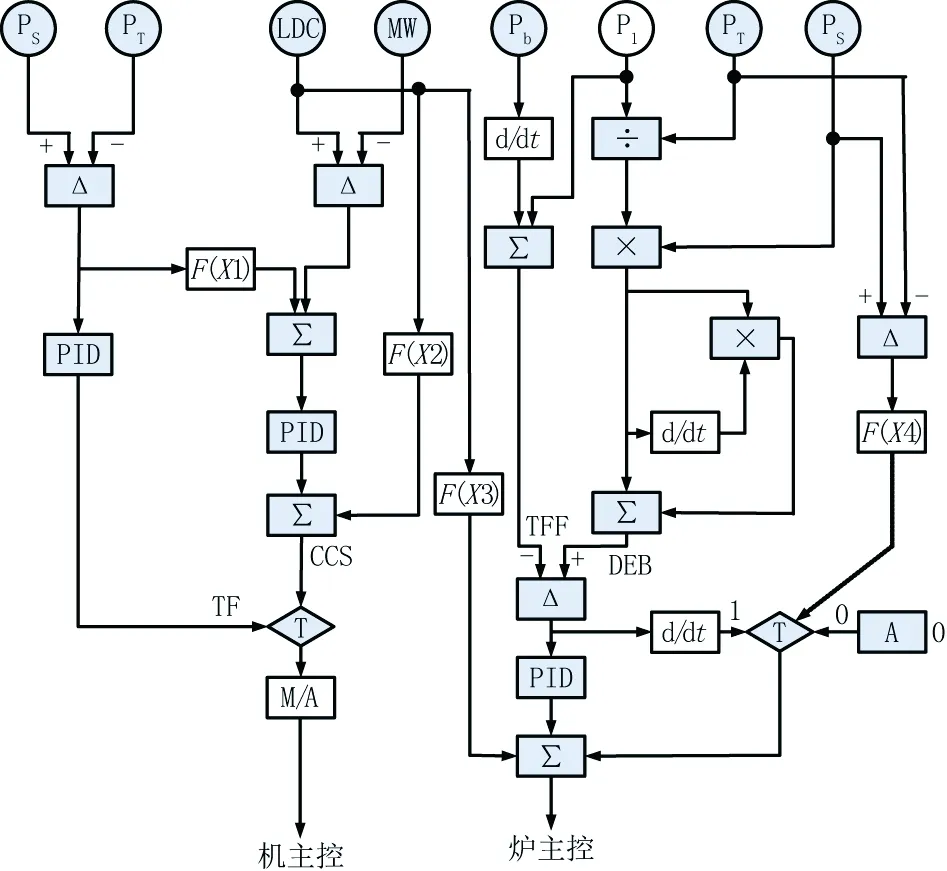
图1 机组DEB协调控制系统组态

2 RB控制策略
国投晋城热电厂一期2×300 MW机组协调控制采用北京日立控制系统逻辑,RB控制结合MCS、FSSS、DEH 3个控制系统的功能,在考虑各种工况的前提下,实现机组在自动状态下完成整个RB过程。
2.1 触发RB动作的条件
机组运行在协调控制方式时,操作员在CRT上即可以手动投入RB功能。在机组负荷大于180 MW且辅机出力允许时,并列运行的任一辅机故障跳闸即可触发RB。
2.2 辅机最大出力允许的确定
在不低于机组最低稳燃负荷的基础上,分别调整2台电动给水泵的勺管开度(注意电动给水泵的电流不能超流)至机组稳定运行时负荷达到最大值。一般将同类设备的最大负荷值降低5%,选较小值作为RB动作时的目标负荷值[4]。本机组给水泵RB动作时的目标负荷值为150 MW。
2.3 RB动作时相关设备动作情况
给水泵RB发生时,切除B磨及C磨(间隔4 s),投A组及D组油枪。
RB动作时进行切磨投油快速将燃料降到RB目标负荷所对应的燃料量。同时由于燃料量的减少,根据磨煤机的停运台数,通过函数分别折算出一次风机动叶、送风机动叶、引风机动叶开度的变化值,再经过限速后作为动叶开度的前馈信号。
2.4 RB动作时机组控制方式的变化
当RB发生时,机组协调控制系统切换控制方式:汽轮机主控处于自动状态调节机前压力;锅炉主控由自动状态切换为跟踪状态调节燃料量。
2.4.1 锅炉主控
跟踪的控制方式是一种开环控制,锅炉主控输出为RB动作后的目标燃料量。由于煤质变化较大,RB目标负荷折算的煤量是由RB发生前一时刻的煤量与机组实际功率的比值,乘以RB目标负荷计算出来的,这样可以有效避免煤质变化引起的RB目标煤量的偏差。为了防止磨煤机跳闸后,运行的磨煤机自动增加煤量的现象,在控制组态里作了逻辑判断,RB期间目标燃料量与实际煤量经过小选作为锅炉主控输出,避免了这种情况的发生。RB触发时锅炉主控逻辑控制图如图2所示。
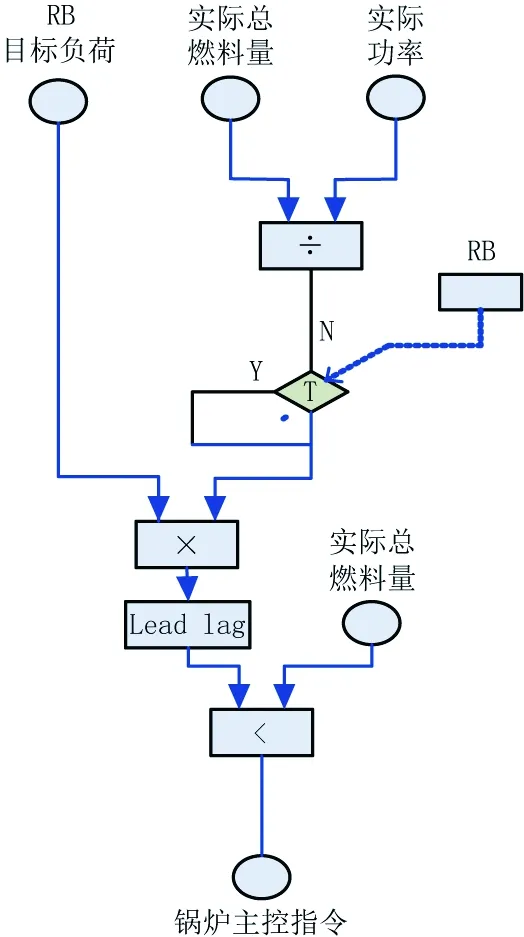
图2 RB触发时锅炉主控逻辑控制
2.4.2 汽轮机主控
RB发生时,汽轮机主控切换到滑压运行方式。由于RB发生后以降压方式减负荷比较有力,以定压方式成功率较低,原因是定压运行造成汽轮机调门开度太小,不利于控制,特别是给水泵RB,不降压会造成锅炉上水困难,以至于可能由于锅炉汽包水位低而触发MFT。RB滑压曲线应接近机组正常滑压曲线,目标值要略高于同负荷下正常滑压设定值,防止因降压目标太低造成调门过开,使汽温大幅下降。本机组正常滑压曲线与RB动作时滑压曲线数据如表1所示。

表1 正常滑压曲线与RB动作时滑压曲线
滑压速率应设置适当,太快会导致汽轮机调门大幅开关,对主汽温、汽包水位产生较大影响。同时,滑压速率决定了机组主要参数能否控制在安全范围内[5-6]。
为了防止RB发生后机组负荷反调,设计有调门禁开逻辑,在RB发生后的一定时间内让压力设定值不变,这样调门就不会出现反调,等实际主汽压力开始下降后再切到RB滑压曲线[7-8]。
3 给水泵RB试验
国投晋城热电厂一期2×300 MW 机组工程2号机组进行了给水泵RB试验。RB动作时,锅炉减燃料速率为126 t/min;机组切换到滑压运行模式,为了防止汽机调门反调,保持5 s压力设定值不变,5 s后按照RB滑压曲线减负荷,给水泵RB滑压速率为0.3 MPa/min。另外,给水泵RB时在原有RB滑压曲线基础上,设定值增加0.3 MPa,以加快RB进程。
给水泵RB发生前,机组负荷为291.1 MW,主蒸汽压力为15.77 MPa,主蒸汽流量为896.1 t/h,汽包水位为90 mm,汽包压力为17.14 MPa,炉膛负压为-88 Pa,锅炉主控指令为119.153 t/h,给水流量为1 060.3 t/h,1号给水泵勺管开度反馈为64.217%,3号给水泵勺管开度反馈为63.948%,2号给水泵勺管开度反馈为0%。
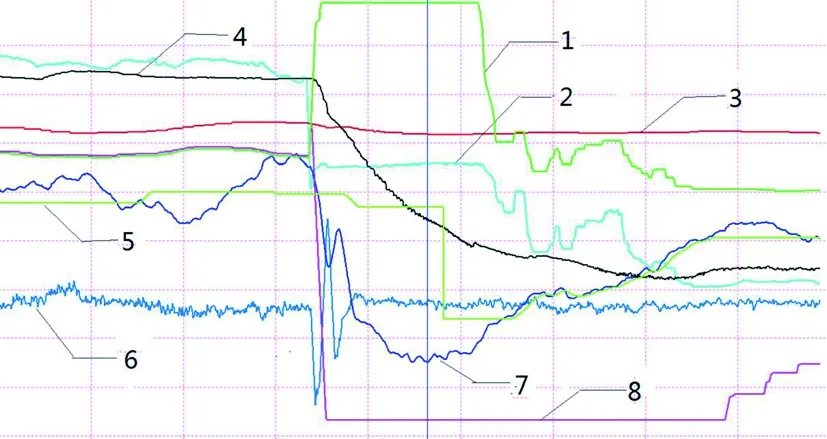
试验条件具备后由运行人员在CRT上手动停止1号给水泵(2号给水泵未投入备用状态),触发RB过程。给水泵RB过程中机组主要参数变化曲线如图3所示。
(a)

(b)图3 给水泵RB过程中机组主要参数变化曲线
图3中曲线:1为3号给水泵勺管开度反馈,%;2为给水流量,t/h;3为主蒸汽压力,MPa;4为主蒸汽流量,t/h;5为汽包水位设定值,mm;6为炉膛压力实际值,Pa;7为汽包水位(补偿后),mm; 8为1号给水泵勺管开度反馈,%;9为发电机功率,MW;10为2号引风机动叶开度反馈,%;11为1号引风机动叶开度反馈,%;12为实际总燃料量,t/h;13为锅炉主控指令,t/h。
从图3所示的RB过程曲线可以看出,1号给水泵停运后,3号给水泵勺管开度强制全开15 s后释放,在这个过程汽包水位会急剧下降后缓慢回升。同时,RB动作会触发切磨投油,根据切除磨煤机的个数经折现函数形成的前馈信号作为一次风机和引风机动叶开度指令的一部分。由于切磨煤机B和C,炉膛负压会瞬间增大,此时运行引风机的动叶开度也会瞬间减少,以减少炉膛负压的剧烈波动。锅炉主控指令会以一定的速率减燃料,至目标负荷所对应的燃料量。整个过程各个主要参数变化趋势合理的,变化范围在允许的范围之内,试验期间没有造成机组停机。
4 结束语
通过国投晋城热电厂2号300 MW亚临界直接空冷机组的RB动态试验可以看出,试验过程中,燃烧比较稳定,协调控制系统、燃烧调节系统、风烟系统、给水调节系统正常, 动态特性良好,提升了机组的安全性、经济性。
参考文献:
[1] 袁俊文,马 钢. 300 MW直接空冷机组协调控制系统及AGC响应特性的分析[J]. 黑龙江电力,2012,34(3): 174-176.
[2] 边立秀,周俊霞. 热工控制系统[M]. 北京:中国电力出版社,2010.
[3] 林文孚,胡 燕.单元机组自动控制技术[M]. 北京:中国电力出版社,2008.
[4] 张缠保,李梅凤,杨文杰. 协调控制系统中RB试验[J]. 山西电力技术,1999 (1):17-19.
[5] 张建志,焦 健.白城电厂2×660 MW机组无跳闸RB试验技术研究[J]. 东北电力技术,2015,36 (3):47-51.
[6] 丁永允,曲洪雄.600 MW超临界火电机组RB控制策略与试验[J]. 东北电力技术,2011,32(5):17-20.
[7] 王 琪,刘文平.600 MW直接空冷机组RB试验控制策略优化与试验措施完善[J]. 内蒙古电力技术,2008,26(4):20-23.
[8] 高绍峰.300 MW燃煤机组RB试验的研究[J]. 华北电力技术,1997(9):8-9.
猜你喜欢
设备管理与维修(2022年21期)2022-12-28
水泵技术(2021年4期)2021-11-20
内燃机与配件(2021年15期)2021-09-10
科学与技术(2019年11期)2019-03-29
电站辅机(2017年3期)2018-01-31
科学与财富(2017年12期)2017-05-16
山东工业技术(2016年15期)2016-12-01
广西电力(2016年4期)2016-07-10
东北电力技术(2016年2期)2016-05-17
电力科技与环保(2016年3期)2016-04-11