纯电动自动驾驶观光车制动系统方案设计与研究
2018-06-18 08:59程泊静李治国谭慧陈标
时代汽车 2018年8期
程泊静 李治国 谭慧 陈标
湖南汽车工程职业学院 湖南省株洲市 412000
随着科技的发展,自动驾驶技术得到了社会越来越多的关注。现代高科技与汽车技术相结合,无人驾驶汽车已成为当今国内外汽车业发展的热点。实现汽车自动驾驶的关键技术包括环境感知、导航定位、轨迹规划和底层线控等。那么在底层线控技术框架中,制动系统的自动控制无疑是非常关键的,因为制动系统直接关系到了自动驾驶汽车的安全性能。本项目依托湖南汽车工程职业学院-李德毅院士专家工作站针对纯电动自动驾驶观光车进行改造,依据目前的有人驾驶的纯电动观光车驾驶平台进行自动驾驶的纯电动观光车驾驶平台改造工程,对自动驾驶技术发展具有重要意义。
1 自动驾驶汽车发展背景
美、日等国研究自动驾驶起步较早、基础较好,并在近年来研究制定了许多政策为自动驾驶技术发展保驾护航。我国也正在通过“中国制造2025”等一系列规划,让自动驾驶技术得到国家层面的大力支持。从汽车行业来说,目前国内外主要的汽车制造商均涉足自动驾驶领域,另外互联网等其他科技企业也参与进来。如2017年,宝马牵手百度进行自动驾驶汽车的技术研发。在学术界,国内外各科研机构、院校在国家政策的支持下,自主开发或与企业合作探索无人驾驶技术。例如,李德毅院士在国内首次完成北京至天津高速公路的全程无人驾驶,率先实现世界第一辆无人驾驶公交车郑州至开封的开放道路无人驾驶。
2 纯电动自动驾驶观光车的制动系统改造方案
2.1 自动驾驶整体方案设计
通过查询知网,发现在国内目前针对自动驾驶制动系统的改造已经有了一些可供借鉴的案例。尤其是针对液压制动系统改造的方案相对比较成熟,对其进行的自动驾驶改造不会干扰到原有平台功能的实现。
为使纯电动观光车能够自动驾驶,首先需要给出整体方案设计(图1)。通常来说,自动驾驶车辆为了能够让上位机正确的做出路径规划和决策需要一个强大的环境感知系统。目前本项目采用的是一线激光雷达和毫米波雷达来完成外部环境的探测,通过雷达的信息融合,得到当前环境的行驶现状。同时为了保证观光车能够完成在既定路线、特定区域进行自动驾驶,本项目中还为实验平台配备的GPS导航设备。

图1 自动驾驶整体方案设计
在底层控制平台上,为保证决策指令的正确执行,本项目针对转向、制动和传动系统都进行专门的改造,并设计的专用的控制ECU。
2.2 制动系统改造方案
目前针对制动系统的改造方案已经有较多案例,双回路系统、电液控制等等。在参考了大量案例和结合本项目实际情况后,本项目以下图的纯电动观光车(图2)为实验平台进行自动驾驶改造。改造的设计目的是为了形成日后可行的产业化套件方案,因此主要考虑以下两个指标。

图2 观光车实物图
2.2.1 可靠性高
2.2.2 成本低
根据设计方案的要求,通过设计制造专用连接推杆、加装直流电动机、设计专用制动控制ECU的方式。设计出的执行机构示意图如图3所示。
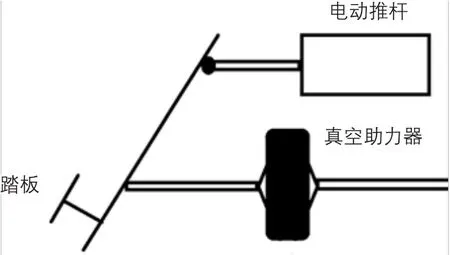
图3 执行机构示意图
在该系统中,核心部件是专门设计加工而成的连接推杆机构和电机。为了保证设计的初衷,电机的选择应尽量成本低、故障率低、执行可靠的。专用连接推杆机构因为会频繁的被使用,因此应该针对不同的工况进行力学仿真分析,以保证高可靠性。本方案的最终实物图如图4所示。

图4 执行机构实物图
3 结语
本文中所提到的方案经过实际测试发现可靠有效,是一种低成本高可靠性的自动驾驶制动系统设计方案,为未来自动驾驶技术产业化落地有较大帮助。
猜你喜欢
车迷(2022年3期)2022-08-01
智能制造(2021年4期)2021-11-04
北京航空航天大学学报(2021年9期)2021-11-02
建材发展导向(2021年6期)2021-06-09
小读者(2021年2期)2021-03-29
汽车观察(2018年10期)2018-11-06
专用汽车(2018年10期)2018-11-02
初中生世界·九年级(2017年8期)2017-09-06
科学大众(中学)(2017年3期)2017-07-06
海外英语(2013年11期)2014-02-11