
联合语义的深度学习行人检测①
2018-06-14 08:49刘秉瀚
计算机系统应用 2018年6期
邓 炜,刘秉瀚
(福州大学 数学与计算机科学学院,福州 350108)
1 引言
行人检测按照视频视角可以分为直立行人检测和俯视行人检测.行人检测常被用于基于目标检测的人数统计、行人行为分析和视频语义理解等,在公共安防、自动驾驶、人群引流、场所规划等领域具有重要意义.行人检测的一般方法有两步:第一步提取行人特征,第二步根据特征进行行人定位和判别.2005年Dalal[1]提出用方向梯度直方图特征(Histogram of Oriented Gradient,HOG)和支持向量机(Support Vector Machine,SVM)分类器检测直立行人[2],效果远超之前的方法,再次掀起了行人检测的研究热潮.然而多数行人检测的方法依然利用图像纹理特征、像素统计特征或人的形态特征等底层特征[3,4].
近年来,深度学习方法在目标检测方面取得了很大成功,深度学习可以组合行人的底层特征,得到更抽象的高层特征表示,检测更具鲁棒性.其中基于区域卷积神经网络(Region-Based Convolutional Neural Network,RCNN)的目标检测具有更好的表现和更快的处理速度[5-9].基于深度学习的直立行人检测研究较多,如文献[10-13].而通过深度学习检测俯视行人的研究则很少.VuT[14]通过对象之间的上下文关系,在基于本地模型区域卷积神经网络的基础上,提出一个全局的卷积神经网络模型来检测人头的位置,并用一种对象成对模型来联合训练,在人数不多的生活场景中表现较好,但模型复杂,处理速度较慢.Stewart[15]等人将图像解码成一组人物模型,并直接输出一组检测假设,改进了行人目标在拥挤场景下的检测效果,但是如果序列中第一个目标有遮挡模糊等情况,可能会影响后续目标的检测.
基于深度学习的行人检测效果还有待于提升,这是因为行人检测面临的情况复杂多样:(1)在拥挤人群等复杂环境中很难准确分离行人个体;(2)行人目标姿态各异、可大可小、或远或近;(3)行人穿戴的服饰或携带的东西对行人目标的干扰.这些问题都可能导致行人目标的误检或漏检.
视频中行人的语义属性指与行人语义上关联的行人附属属性[16],例如行人的帽子、包等.在行人检测的应用场景中,人不是人们感兴趣的唯一目标,人的语义属性同样具有意义.随着计算机视觉研究的深入,图像中目标语义关系的挖掘、视觉关系的提取也越来越受关注[17].行人语义属性也是影响行人检测的因素之一.因此,针对上述行人检测所存在的问题,本文提出融合行人语义的深度学习俯视行人检测,同时检测行人和行人的语义属性,利用行人的语义属性来辅助检测行人,抑制行人语义属性对行人的干扰,增加检测精度.
2 深度学习
深度学习简而言之就是多层神经网络,典型的深度网络有卷积神经网络、递归神经网络、深度置信网络和生成对抗网络等.
Faster RCNN[7]是一种基于卷积神经网络的目标检测模型,它抛弃了基于区域提名的卷积神经网络一贯的选择性搜索(selective search)[5,6],首次提出了区域提议网络(Region Proposal Network,RPN),使得区域提名、分类、回归一起共享卷积特征,网络速度加快.Faster RCNN实质上是RPN和Fast RCNN[6]的结合,RPN和Fast RCNN共享卷积层,先由RPN提取候选区域,再把候选区域送到Fast RCNN中进行目标识别.它主要有四个步骤.第一步是特征提取:输入整张图片,通过卷积神经网络提取特征图;第二步是区域提名:在第一步得到的特征图上进行区域提名;第三步是分类与回归:对每个提名的区域进行目标或非目标的二分类,用回归模型微调候选框位置和大小;第四步是目标识别:选取得分高的候选区域进行目标识别.
Faster RCNN需要对大量候选区域先判断是否是目标,然后再进行目标识别,分成了两步,这点不如不需要区域提名的端到端检测方法如YOLO[8]和SSD[9].但是YOLO使用S×S的分割策略,如果两个目标落入同一个格子也只能识别出一个目标,而SSD中定义的Default Box的形状以及网格大小是事先固定的,对特定的小目标提取不够好,Faster RCNN则更加灵活,而且Faster RCNN对设备的要求不高,更具有实际使用条件.基于Faster RCNN目标检测的优势本文选择Faster RCNN模型设计俯视行人目标检测器.
Faster RCNN目标检测已被证明具有很好的鲁棒性,但对小目标检测效果却不够理想.在大多数公共场所出入口的近垂直视角的监控视频中,行人的尺度变化较小,但场景中会存在很多小尺度的物件.本文改进了Faster RCNN目标检测器对小目标的辨别力,并针对行人穿戴的服饰或携带的东西的干扰,引入行人的语义属性,把行人的语义属性和行人联合训练,通过目标检测器分类再聚合,之后进行行人的辨识.本文所提出的鲁棒行人检测方法可分为两个步骤:(1) 行人与行人语义属性目标检测(检测出候选行人目标及若干个行人语义属性);(2) 行人与语义属性聚合(基于空间信息建立行人与其语义属性的联系,合并行人与其语义属性,对候选行人目标自适应的奖励得分,融合检测框).
3 基于联合语义的行人检测
3.1 基于Faster RCNN的目标检测
在基于深度学习的行人检测中,常把行人身体的显著特征作为感兴趣检测目标.俯视的行人检测的场景多为近似垂直视角监控视频,行人的头部和肩部是最显著特征.本文以行人的头部和肩部作为候选行人检测目标,而把帽子、提包和背包等易造成混淆的行人语义属性,作为辅助检测目标.
在Faster RCNN中,图片在输入网络后,依次经过若干卷积层和池化层的特征提取后,得到一个高维的特征图.然后把这个特征图送到RPN网络中,进行候选区域提名.RPN网络使用滑动窗口策略.输入到RPN的特征图,被划分成n×n个矩形窗口(滑动窗口),把每个矩形窗口的中心点当成一个基准点,围绕这个基准点选取k个不同尺度、不同长宽比的矩形框(Anchor)的对应区域作为候选区域(如图1中的虚线矩形框).文献[7]取n=3,并定义3种基准尺度框:128×128、256×256、512×512,对每种基准尺度框进行 3 种长宽比率变倍 (1:1、1:2、2:1),这样就得到有9个Anchor(k=9).然后把候选区域送到两个全连接层:分类层和窗口回归层,进行目标或非目标的判别和矩形窗口位置的微调.最后选取得分最高的前300个候选区域到后续的ROI Pooling层和全连接层中进行目标分类.由于在高维的特征层,有效感受野很大,文献[7]中的Anchor可以感知一个很大范围的目标.但是小尺度的目标在这个特征层上的特征不明显,易导致漏检.
本文基于Faster RCNN的目标检测模型(如图1),结合本文行人检测的特点:近似垂直视角、多小尺度目标、行人语义属性联合训练和特定的行人数据集,对Faster RCNN做了适当调整.在行人数据集中,行人及其与语义属性的大小大部分集中在60×60到300×300像素之间,为了在不同尺度上检测行人,本文使用 64×64、128×128 和 256×256 作为 Anchor的基准尺度框,以此增加对小目标的鲁棒.
在得到输入RPN的特征图前,有若干个卷积层和池化层,这里可以使用预训练的图像分类网络,比如在ImageNet数据集上训练好的VGG-16[18]和ZF-net[19],来初始化网络的参数(权重和偏移值).VGG-16是一个很深的网络,有13个卷积层和3个全连接层,速度慢,精度较高.而行人检测对实时性的要求高,所以本文选择了ZF-net作为预训练的模型,ZF-net只有5个卷积层和3个全连接层,速度快,深度虽不如VGG-16,但本文用行人的语义属性辅助检测,弥补了精度的差距.此外,较浅的ZF-net的特征层维度比VGG-16低,因此小目标的特征在ZF-net中会更明显.
行人检测的场景多为监控摄像头捕捉的视频图像,因此通常距离行人较远,不存在很大的目标,因此本文改进了Faster RCNN对小目标的辨别力,虽然大目标的检测会受到影响,但在实际应用中,多为中小目标,所以影响非常小.
本文根据行人数据集的规模和大量实验的训练效果,调整了网络的学习率、迭代次数和批次大小等.使得网络模型有效拟合了行人数据,并避免了用小样本的俯视行人数据集训练时出现过拟合.
目标检测器最终输出候选的行人目标框p和语义属性目标框a.p和a都带有一个目标得分score.本文在全连接层先对候选目标做一次粗筛选,把大量的的低分无意义目标去除,以便于加速后续的处理.阈值μ1的设置要保证语义属性a高置信低误检以辅助候选行人p的判断.μ2的设置要保证高敏感以避免漏检行人p.
3.2 行人与语义属性聚合
检出候选目标之后,需进行目标聚合.融合行人及其语义属性,先要建立行人候选目标与其语义属性的联系.实际场景中的行人及其语义属性最显而易见的联系体现在空间距离,且语义属性与行人属于单一的从属关系,所以本文直接用距离贪心的策略建立行人和语义属性的联系:计算语义属性与行人的重叠率,重叠率大于0视为有联系,如果语义属性与多个行人都有联系,则计算该语义属性中心点到各行人中心点的距离,将其划归于最近的行人.为体现语义属性属于行人的概率大小,本文重叠率定义为重叠区域的面积除以语义属性目标框面积.
设:候选目标框左上角和右下角坐标为:(x1,y1,x2,y2),每个候选目标框对应一个检测得分为score.一帧图像中检测出行人候选框集合为:P={p1,p2,…,pn},行人语义属性框集合为:A={a1,a2,…,am}.则按式(1)和(2)求重叠率为o与距离d:

其中
由于附属物只会出现在行人的附近,所以当检测到语义属性时,语义属性附近有行人的概率加大.基于此,本文对聚合了a的行人候选框p进行自适应加分奖励,奖励原则为:与a距离近、a的检测分值高,则奖励力度大,见式(3).由于sigmoid函数具有平滑渐进、在零点附近的导数高值性的特点,本文选择sigmoid函数归一化,并按式(4)进行自适应加分.
其中,β、τ为sigmoid范围调整参数,α为最高加分阈值参数.
本文行人与语义属性聚合的具体步骤如下:
合并后的结果(联合语义的行人集)如图2.经过融合和得分奖励之后,图像中检出目标为:联合语义的行人、行人和未与行人合并而独自存在的语义属性.本文不去除孤立的语义属性目标框,因为语义属性目标在行人检测的应用场景下,可能是遗失物品,可能是危险品,可以给人提供信息,具有应用价值.
4 实验分析
本文方法检出行人目标之后,可进行帧间目标跟踪,从而得到更精确的检测结果.由于篇幅限制跟踪细节无法展开,因此,实验仅用过滤低分行人目标.

图2 行人与语义信息聚合
本文用一个近似垂直视角的行人数据集来评估本文方法的性能.数据集中的图像和视频采集自多个不同的场景.包括750张的照片和多段视频共20分钟.我们从视频中选取2000帧图像用来训练,剩下的用来测试.照片和视频没有统一的分辨率,但长边小于等于1000像素.本文定义行人的语义属性包括:帽子、手提包(袋子)、背包、箱子、行李箱、自行车、购物车和婴儿车.表1是数据集详细信息.

表1 训练数据集
为了补充数据和平衡各类语义属性的数目,我们挑选了部分训练数据进行数据增广.第一,对选取的训练图像按倍率0.6、1和1.2进行缩放;第二,旋转90度;第三,镜像翻转;第四,在图像上加上高斯噪声.经过这样处理,挑选出来的每一张图像都能得到额外的23张图像.
本文在Windows7系统中使用GTX1050Ti4G的GPU,在Caffe框架完成实验.
我们通过反复实验调整了网络模型的参数,使网络模型拟合数据,最终确定网络参数:学习率:0.005,优化算法:随机梯度下降(Stochastic Gradient Descent ,SGD),梯度更新的权重 (momentum):0.9,权重衰减(weight decay):0.0005,批次大小 (batch size):128.最终网络模型的loss如图3(a)和图3(b).
我们同时做了大量的测试来确定实验中用到的3个阈值μ1、μ2和μ3的取值,如图3(c)是1000张图像中累计的候选目标的得分分布.μ1是语义属性的筛选阈值,由于只对语义属性做一次筛选,且需用语义属性得分自适应调整行人的得分,综合考虑了μ1取值实验的结果,本文取μ1=0.7.μ2对行人做粗筛选,可以让尚有争议的候选目标通过,本文取μ2=0.5.μ3是对最终行人目标的筛选,所以μ3可以根据人数统计的场景和训练数据集手动调整,本文取μ3=0.8.

图3 参数取值实验
式(4)对行人的得分进行了自适应的调整.其中,从式(3)可得 ω<1,我们取 β=10,τ=0.5得 ω趋于0时,的值趋于0,ω趋于1时的值趋于1.为了让加分不超过p自身的得分,我们取α =µ2.
为了展示实验结果和评估本文的方法,我们对比了文献[14]、文献[15]和原始Faster RCNN[7]的方法.实验结果的对比见图4、图5和表2.其中部分方法要求把图像大小缩放到一定尺度.

图4 视频场景中检测到的行人数目对比
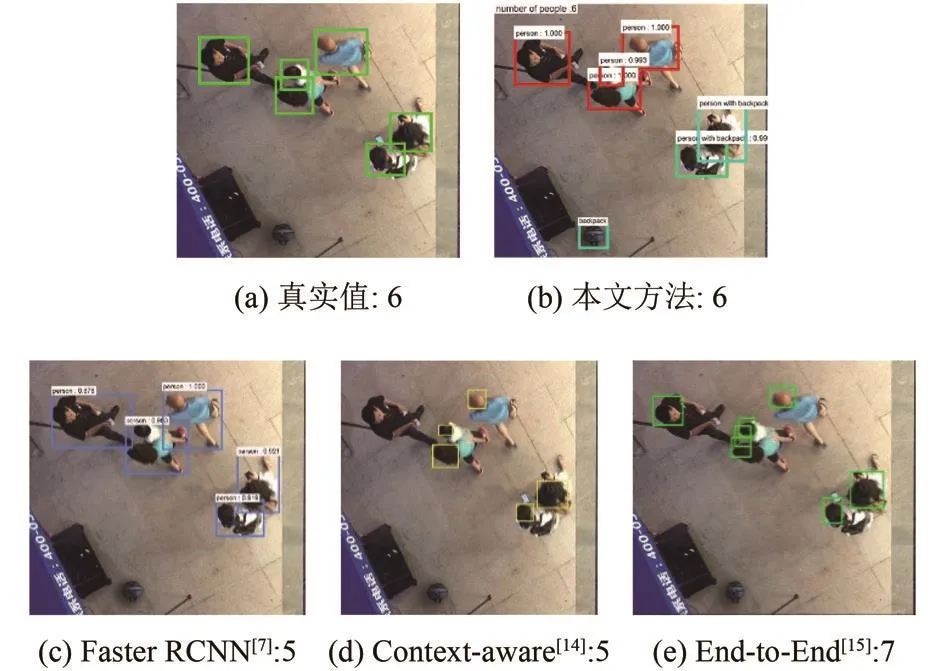
图5 其中一帧检测到的人数对比
本文使用常规指标来评估我们的方法:均方误差和平均绝对误差.均方误差平均绝对误差其中是第j帧图像中的实际行人数目是检测到的行人数目.

表2 实验数据表
从表2可以看出,在俯视行人检测中,本文方法准确率比只用Faster RCNN的方法更高,而且耗时增加很少,对比其他一些方法也有不错的竞争力.
此外,本文使用在表1训练数据集中训练的网络模型,从普通场景中随机抽取了100帧图像进行了测试.测试结果见图6和表3.从图表中可以看出,在普通场景的测试效果一般,想要取得更好的结果需要在普通场景的行人数据集中训练网络模型.但是在普通场景中,使用本文联合语义的方法比不使用联合语义的方法精度更高,说明联合语义的方法也具有改善其他场景行人检测的潜力.

表3 普通场景行人检测实验数据表
5 结论与展望
本文提出了一种有效减少误检和漏检的俯视行人检测方法.基于Faster RCNN框架进行行人目标检测,在兼顾处理速度的情况下,可以有很好的鲁棒性.我们把容易造成误检和漏检的行人语义属性作为辅助检测目标,和行人联合训练,然后分别检测,再反过来利用行人的语义属性辅助判别行人目标,自适应地调整行人检测得分,融合行人及其语义属性,增加了行人目标的可靠性.实验证明,本文的检测方法错误率小,处理速度快,适合应用于商场或超市出入口等行人情况复杂、混淆目标多的监控场景.下一步研究方向为优化深度网络速度、把语义属性辅助与损失函数结合、目标跟踪、滞留物检测机制和异常徘徊检测机制等.

图6 普通场景行人检测实验结果
1 Dalal N,Triggs B.Histograms of oriented gradients for human detection.Proceedings of 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition.San Diego,CA,USA.2005.886-893.
2 徐渊,许晓亮,李才年,等.结合SVM分类器与HOG特征提取的行人检测.计算机工程,2016,42(1):56-60,65.
3 甘玲,邹宽中,刘肖.基于PCA降维的多特征级联的行人检测.计算机科学,2016,43(6):308-311.[doi:10.11896/j.issn.1002-137X.2016.06.061]
4 刘璨,孟朝晖.基于改进型LBP特征的监控视频行人检测.电子设计工程,2016,24(21):48-50.[doi:10.3969/j.issn.1674-6236.2016.21.015]
5 Girshick R,Donahue J,Darrell T,et al.Region-based convolutional networks for accurate object detection and segmentation.IEEE Transactions on Pattern Analysis and Machine Intelligence,2016,38(1):142-158.[doi:10.1109/TPAMI.2015.2437384]
6 Girshick R.Fast R-CNN.Proceedings of 2015 IEEE International Conference on Computer Vision (ICCV).Santiago,Chile.2015.1440-1448.
7 Ren SQ,He K,Girshick R,et al.Faster R-CNN:Towards real-time object detection with region proposal networks.Proceedings of the 28th International Conference on Neural Information Processing Systems.Montreal,QC,Canada.2015.1137.
8 Redmon J,Divvala S,Girshick R,et al.You only look once:Unified,real-time object detection.Proceedings of 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR).Las Vegas,NV,USA.2016.779-788.
9 Liu W,Anguelov D,Erhan D,et al.SSD:Single shot multibox detector.Proceedings of the 14th European Conference on Computer Vision.Amsterdam,the Netherlands.2016.21-37.
10 Hu YC,Chang H,Nian FD,et al.Dense crowd counting from still 25-6362s with convolutional neural networks.Journal of Visual Communication and Image Representation,2016,38:530-539.[doi:10.1016/j.jvcir.2016.03.021]
11 Wang C,Zhang H,Yang L,et al.Deep people counting in extremely dense crowds.Proceedings of the 23rd ACM International Conference on Multimedia.Brisbane,Australia.2015.1299-1302.
12 芮挺,费建超,周遊,等.基于深度卷积神经网络的行人检测.计算机工程与应用,2016,52(13):162-166.[doi:10.3778/j.issn.1002-8331.1502-0122]
13 左艳丽,马志强,左宪禹.基于改进卷积神经网络的人体检测研究.现代电子技术,2017,40(4):12-15.
14 Vu TH,Osokin A,Laptev I.Context-aware CNNs for person head detection.Proceedings of 2015 IEEE International Conference on Computer Vision (ICCV).Santiago,Chile.2015.2893-2901.
15 Stewart R,Andriluka M,Ng AY.End-to-end people detection in crowded scenes.Proceedings of 2016 IEEE Conference on Computer Vision and Pattern Recognition(CVPR).Las Vegas,NV,USA.2016.2325-2333.
16 Zhang HW,Kyaw Z,Chang SF,et al.Visual translation embedding network for visual relation detection.Proceedings of 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR).Honolulu,HI,USA.2017.
17 顾广华,韩晰瑛,陈春霞,等.图像场景语义分类研究进展综述.系统工程与电子技术,2016,38(4):936-948.
18 Simonyan K,Zisserman A.Very deep convolutional networks for large-scale 25-6362 recognition.arXiv:1409.1556,2014.
19 Zeiler MD,Fergus R.Visualizing and understanding convolutional networks.Proceedings of the 13th European Conference on Computer Vision.Zurich,Switzerland.2014.818-833.
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
北京航空航天大学学报(2021年9期)2021-11-02
计算机系统应用(2021年9期)2021-10-11
意林(2021年5期)2021-04-18
电子制作(2019年11期)2019-07-04
扬子江(2019年1期)2019-03-08
北京航空航天大学学报(2018年1期)2018-04-20
小天使·一年级语数英综合(2017年6期)2017-06-07
汽车与安全(2016年5期)2016-12-01
长江学术(2016年4期)2016-03-11
