激光半主动导引头数字控制器的设计与研究
2018-06-13 06:52:04辜磊
现代计算机 2018年14期
辜磊
(中国矿业大学银川学院,银川 750000)
0 引言
半主动激光制导武器是六十年代初发展起来的一门新技术。由于它具有一些优越的特性,如制导精度高、抗干扰能力强、结构简单、成本低、是一种新的有效的制导体制,所以在武器制导系统中被广泛应用。总体来说半主动激光制导是由一个外部的激光发射源将特定波长的激光照射到目标物体上,由于目标表面不平整,激光产生漫反射,而由目标物体漫反射出的光线将会被半主动激光制导武器发现、锁定、追踪。
在这一系列的过程中,半主动激光制导武器中的导引头主要起到了两个作用:一是发现目标物反射的光线,二是按照制导规律将参数送入控制系统。
1 激光半主动制导原理简介
半主动激光寻的器结构如图1包括头罩、光学系统、激光探测器、放大器、和差电路、数字控制器、陀螺伺服机构组成。头罩保护寻的器不受气流影响,光学系统是由一组特殊的透镜组构成,可以把目标物上漫反射出特定波长的光线聚焦到激光探测器上。激光探测器将光信号转换成电信号,通过和差运算和放大器、数字控制器控制陀螺伺服机构,使目标点在激光探测器光屏中间[1]。(允许一定的误差)

图1
其中激光探测器使用象限元件来测定目标相对于光轴的偏移量,常见的有二象限、三象限、四象限,当特定波长的光聚焦到某一象限时,相应的光敏元件输出电信号,经过逻辑电路的逻辑运算后,就确定了目标的相对于导弹的位置,同时电信号被输入到数字控制器中,改变飞行方向追踪目标。原理如图2。

图2
本文研究的系统采用双四象限探测器,双四象限的光敏面分为中心区和外围区,当光线聚焦到中心区时可以实现线性跟踪,由于激光制导武器整个追踪过程比较复杂,本文只讨论在线性区的追踪过程[2]。而且本文对激光探测器做了一定的简化处理,省略了运算电路,直接将光敏面获得的电信号经放大和取样后送入数字控制器处理。双四象限的光敏面如图3所示,简化后的原理图如图4所示。
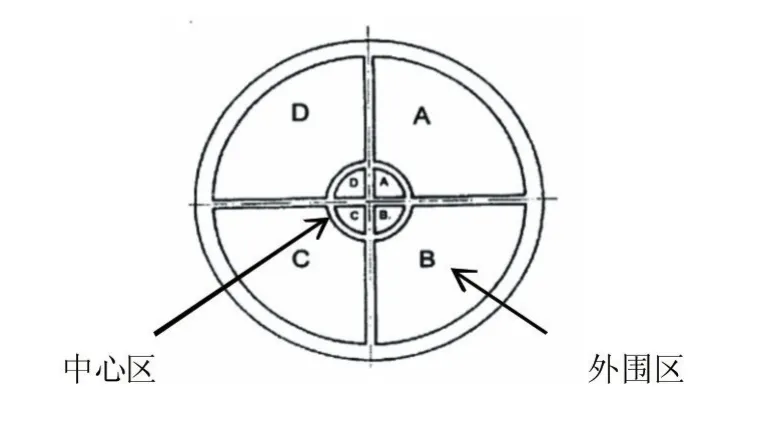
图3
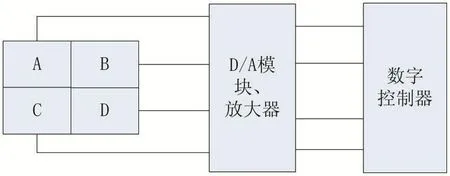
图4
2 构造D(z)的总体方案
2.1 控制器选型
数字控制器是激光制导系统的核心,选择80C51单片机。80C51单片机有一个8位CPU,4个8位并行I/O口(P0-P3),4kb的ROM程序存储器,自带片内振荡器及时钟电路[6]。管脚图如图5。
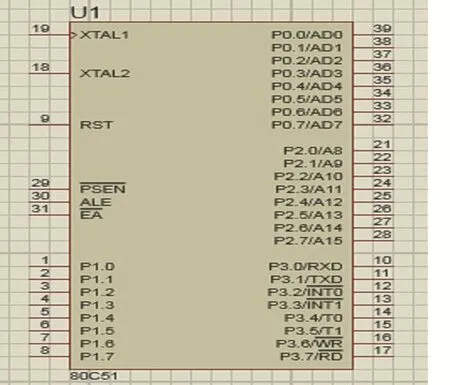
图5
2.2 建立模型
半主动激光制导导引头结构框图如图[3]6所示。

图6
其中漫反射的光经过头罩、光学系统,被激光探测器探测到,所产生的电信号被放大器放大,这一过程中的所有器件都是为了得到一个稳定的位置信号或速度信号,所以在系统框图中我将这一部分等效成输入量E(t)和一个放大系数K。数字控制器D(z)控制伺服陀螺机构输出进动角度。最终的系统框图如图7所示。
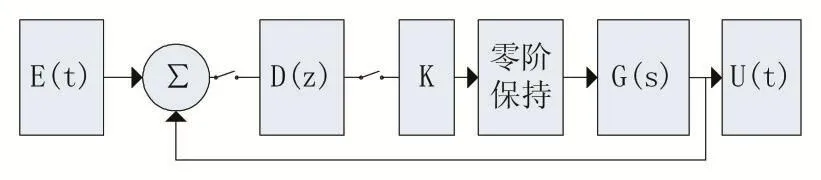
图7
G(s)为伺服陀螺机构,考虑其惯性特性,其传递函数为:
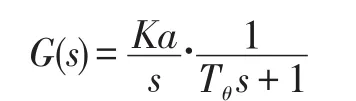
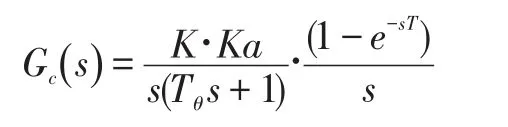
K为放大系数,Ka为机电常数,Tθ为转子时间系数。所以得出系统的广义被控对象开环传递函数为:
2.3 构造数字控制器 D( z)
对 Gc(s)进行 Z变换:

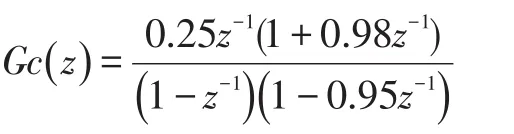
下面就不同情况根据Gc(z)设计数字控制器D(z)。
若令Tθ=2 采样时间T=0.1s,Ka=5K=2
则:
(1)第一种情况:
若目标静止,则输入信号为单位阶跃信号,q=1。Gc(z)存在一个滞后环节[5]。
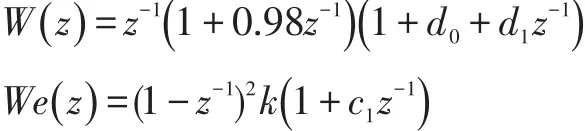
设:
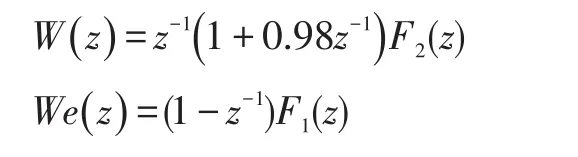
其中:

式中m1为不稳定极点,n1为不稳定零点,r为滞后环节,根据式 Gc(z)得知 m1=1,n1=0,r=1。
则:
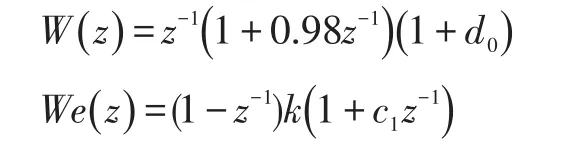
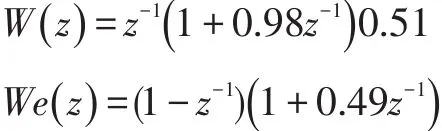
根据W(z)+We(z)=1求出k=1,d0=-0.49,c1=0.49
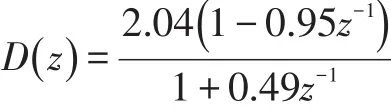
得出:
根据数字控制器脉冲传递函数
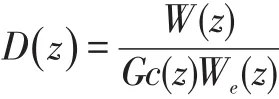
得出:
使用MATLAB仿真
控制系统整体框图如图8所示。
系统输出波形如图9所示。
数字控制器输出波形如图10所示。
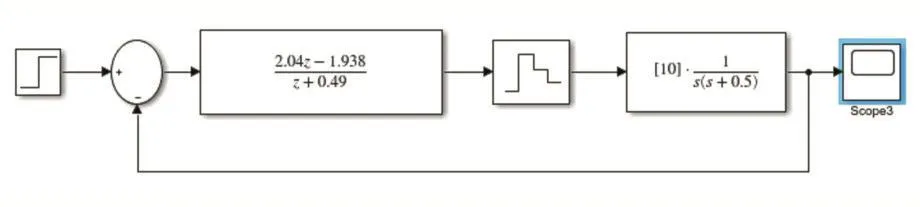
图8
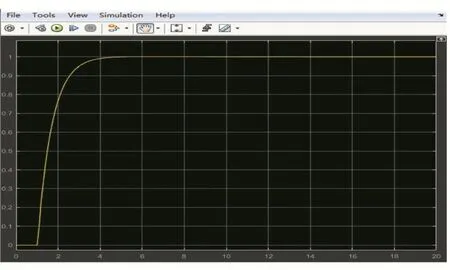
图9
从系统输出波形图中可以看出输出U(t)在第5秒完全跟踪输入信号,并且各采样点之间无波纹。从数字控制器的波形图可以看出数字在有限拍内输出恒定不变,控制器D(z)符合要求。
(2)第二种情况:
若目标做匀速运动,输入信号为速度信号,则q=2
设:
根据W(z)+We(z)=1
得出:

根据数字控制器脉冲传递函数:
得出:

使用MATLAB仿真
控制系统整体框图如图11所示。
系统输出波形如图12所示。
数字控制器输出波形如图13所示。
从系统输出波形图中可以看出输出U(t)在第6秒左右可以实现完全追踪给定信号,从数字控制器的波形图可以看出数字在有限拍内输出恒定不变,数字控制器D(z)符合要求。
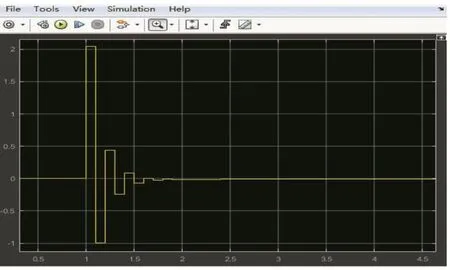
图10
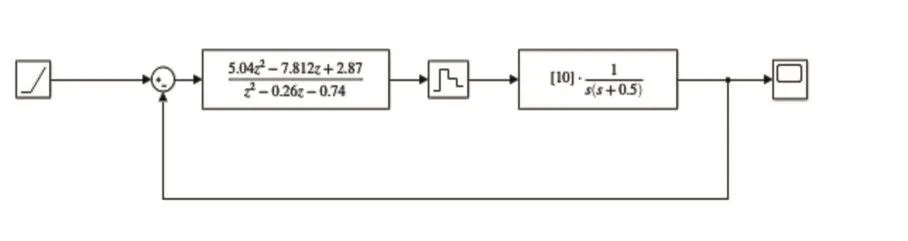
图11
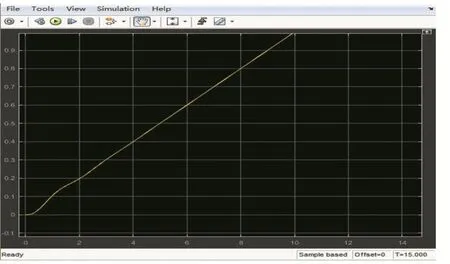
图12

图13
3 数字控制器D(z)的程序实现法
一般来说数字控制器的程序实现法有直接实现法、并接实现法、串接实现法。下面就较为复杂的第二种情况来对比一下直接实现法和串接实现法。
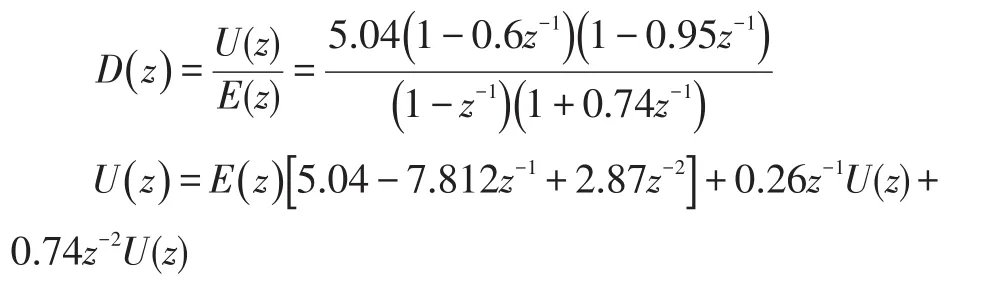
第二种情况的直接实现法:
系统框图及的输出波形图如图14所示。
第二种情况的串接实现法:

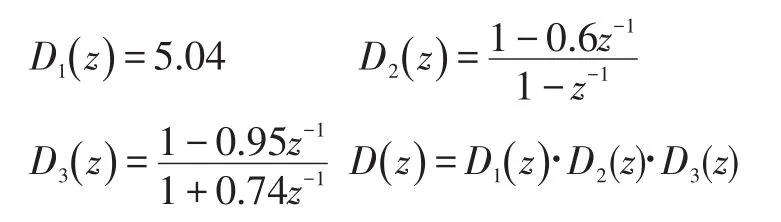

图14
则系统框图及输出波形图如图15所示。

图15
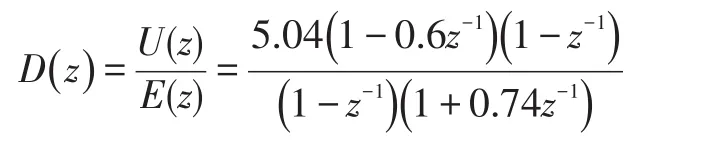
通过这两种程序实现法正常情况下的输出波形图来看,二者的差别很小。但是考虑到激光制导武器在飞行过程中会存在的各种干扰,可能会使数字控制器中的零极点发生变化。如果假设数字控制器中z=0.95的零点发生变化,变为z=1,那么程序框图中的参数也会发生变化,此时再做出系统框图并观察和对比输出的波形。
极点变换后:
对比波形程序框图如图16所示。
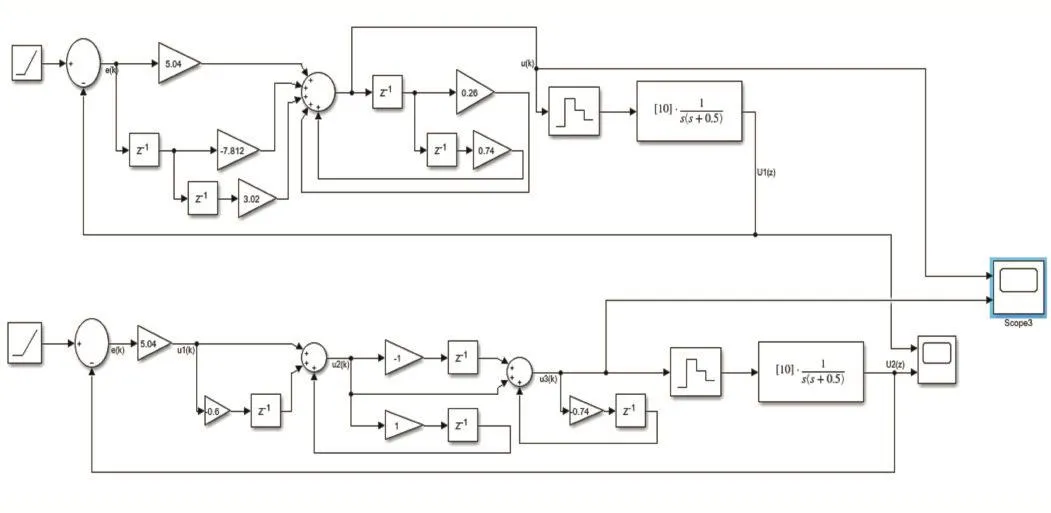
图16
数字控制器输出波形如图17所示。
系统输出波形如图18所示。
由数字控制器输出波形和系统输出波形可以看出:由直接实现法等效的数字控制器波形振幅较大,达到稳态的时间较长,与串接实现法相比,后者更加稳定。由此得出结论:当数字控制器零极点发生变化时,串接实现法更为稳定,抗干扰更强。
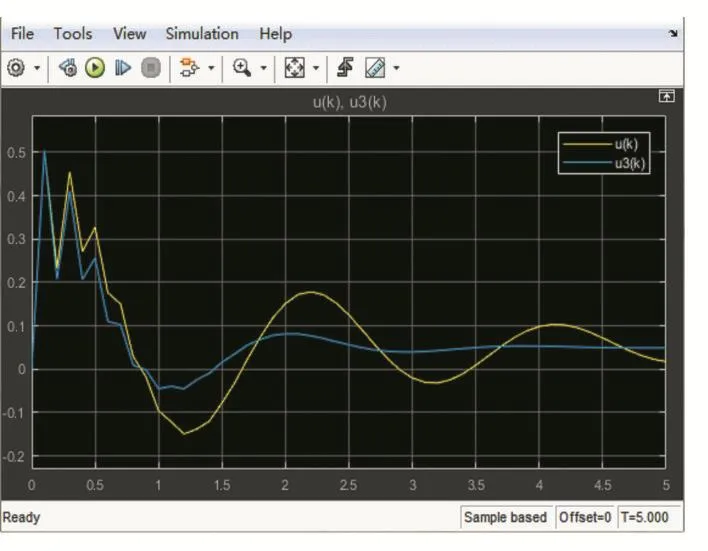
图17
产生这种现象的原因是:直接实现法的D(z)不经过任何变化,直接化成的形式,其零极点被整合到一个式子中,当任意零极点发生变化,或存在一定误差时,会使所有零极点发生相应的变化,对输出结果产生的影响较大。串接实现法是先将D(z)的零极点形式化成多项积的形式,这样变化后零极点互不影响,当控制器中任意零极点发生变化或存在一定误差时,只影响相应的环节的零极点,不会使整个系统的零极点都受到影响。而并接实现法是将D(z)化成多项合的形式,原理和优点都与串接实现法类似,故不再赘述[4]。
4 结语
经过研究发现,不同的输入信号所构造的数字控制器也不相同,因为数字控制器D(z)的结构取决于广义控制对象传递函数Gc(z)和闭环传递函数W(z)、误差传递函数We(z)。而广义被控对象传递函数一旦确定是不会发生变化的,所以构造数字控制器关键在于如何确定 W(z),W(z)取决于 Gc(z)的不稳定零点和外部输入信号的阶次,所以不同输入信号所构造的数字控制器不仅零极点不同,分子分母的阶次也不同。最后根据数字控制器的程序实现法的研究,为激光半主动导引头的程序语言提供理论依据和框架。
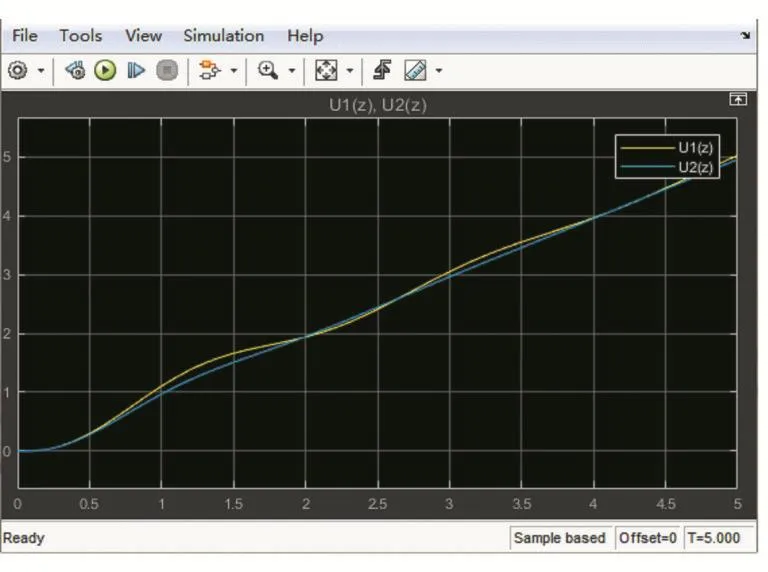
图18
[1]张海洋,赵长明.激光半主动寻的器原理与结构[C].2005全国博士生学术论坛北京理工大学信息科学技术学院,2005:114-115.
[2]孙明.某激光半主动引导头制导电路方案设计及实现[D].南京:南京理工大学,2012.
[3]于英杰,刘藻珍.某型激光导引头建模于仿真研究[J].系统仿真学报,2003,15(2):158-159.
[4]廖道争,施保华.计算机控制技术[M].北京:机械工业出版社,2015:101-123.
[5]杨瑞,张军.自动控制原理[M].四川:电子科技大学出版社,2016:292-293.
[6]苏珊,高如新,谭兴国.单片机原理与应用[M].四川:电子科技大学出版社,2016:14-16.
猜你喜欢
中学生数理化·八年级物理人教版(2021年9期)2021-11-20 06:00:28
攀枝花学院学报(2021年5期)2021-10-19 02:52:58
装备制造技术(2020年11期)2021-01-26 00:38:58
大学物理(2021年2期)2021-01-25 03:26:18
汽车维修技师(2019年7期)2020-01-16 04:33:04
汽车维修技师(2018年11期)2018-05-11 02:38:32
大陆桥视野·下(2017年9期)2017-09-17 15:11:21
中学生数理化·高一版(2017年1期)2017-04-25 13:22:35
中国石油大学学报(自然科学版)(2015年2期)2015-11-10 06:08:17
新高考·高一物理(2014年4期)2014-09-17 06:52:02