
民航电子设备维修机务助手机械臂的研制
2018-06-11 16:10邹志宏
智富时代 2018年3期
关键词:STM32单片机
邹志宏
【摘 要】由于机械臂的技术不断的发展,机械臂在各行各业的应用越来越多。现代民航电子维修中机务人员常常因为去捡一个零件而花费大量时间和精力,甚至会拆掉整个维修部分,此外还有飞机电子线路中线头的抽取也会降低工作效率。通过对这些问题的调研。我们团队利用多自由度控制算法和灵活操纵控制算法实现一种具有高度灵活性、控制精度高、快速上手等特点的民航电子维修机械臂。该机械臂可以用于维护飞机过程中机务人员夹取零件和机务电子工程师抽取线头等,以达到便捷维修的目的,从而提高维修效率。该款机械臂以STM32单片机作为主控制器,通过控制主控制器输出的PWM波的占空比實现对舵机转动的控制,进而实现各个关节的位置控制,实现机械臂在空间内的运动,并结合三个可自由安装的臂端装置,实现夹取物体,吸附金属零部件,抽取残余油液的功能。并且整体采用了开环设计,便于机务人员的操作。由于此机械手臂的功能多样性,使得机务人员在进行普通工作时更加灵活方便,高危作业时操作更加精准安全,比起普通机械手臂有更加广泛的应用空间。
【关键词】STM32单片机;MG946R舵机;臂端装置
一、机械臂总体方案设计
(一)机械臂整体结构
通过计算机编写程序下载到STM32单片机内部,然后由转动旋钮输出的大小不同的电压信号传输至STM32单片机,STM32将收接收的电压信号转换为指令信号。STM32微处理器内部的PWM单元根据指令信号产生PWM信号,驱动舵机旋转。从而达到舵机精确定位,使机械臂的各个关节转过指定的角度,并且控制臂端装置来实现夹取,吸附,抽取等动作。
(二)机械臂功能简介
通过旋钮的转动产生不同的电压信号,输入到STM32机内单片机内,产生PWM波控制舵机的舵面转动,带动臂端装置在空间内的移动。同时控制臂端装置实现以下三个功能。
1.夹取功能:利用MR946舵机作为驱动装置,实现了夹取,搬运物体的功能
2.吸附功能:采用电磁铁作为主要部件,能够吸附小型金属零部件。如螺丝钉,螺帽等。
3.抽取功能:使用舵机给活塞提供动力,结合复位弹簧构成了抽取臂端装置。能实现对残余油液的直接抽取功能。避免了机务人员直接触碰油液对人体造成伤害。
二、硬件系统设计
(一)主控制模块设计
主控制器是机械臂的控制核心,对整个机械臂的控制效果都起着最为关键的作用。所以选择合适的单片机作为主控制器是最为重要的。目前,应用于机械臂的微控制器有很多种,其中STM32单片机和51单片机是使用比较广泛的两种微控制器。51单片机结构简单,成本低,比较经济实惠。而且也不需要太多外设电路模块。STM32单片机比51单片机结构更加复杂,价格更贵,另外编程也比51单片机更加繁琐。但是其优点在于STM32单片机有着更加多的内置模块和资源。
根据机械臂的结构和其需要实现的的功能,经过多次比较后,最后选择STM32单片机作为主控制器
STM32单片机的主要特性如下:
内核为ARM32位的Cortex-M3 CPU512KB的闪存程序存储器;64KB的SRAM;带4个片选的静态存储器控制器。支持CF卡、SRAM、PSRAM、NOR和NAND存储器。
(二)驱动模块设计
驱动模块的设计需结合机械臂的整体结构来考虑。首先驱动系统的质量不应太重,效率也应较高并且驱动系统的响应速度快,使机械臂在空间内运动时动作灵活,位移偏差以及速度偏差均较小;此外作为机械臂作为辅助机务人员工作的工具,必须要求机械臂的驱动系统安全可靠;在工作时操作和维护方便;而且机械臂必须经济实惠,体积尽量要小。
基于上述驱动系统的特点和该机械臂驱动系统的设计要求,该设计选用MR946舵机和步进电机结合使用,来负责机械臂各个关节的驱动。
三、软件系统设计
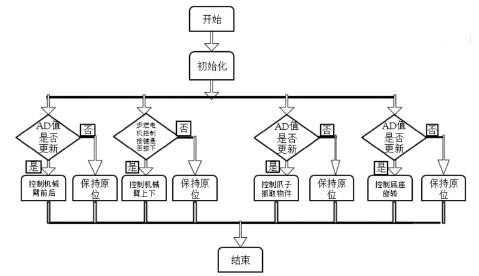
软件系统采用开环设计,当人转动旋钮时产生的电压变化输入进STM32单片机,STM32单片机根据已编写好的程序将电压的变化转变为PWM波输出到舵机,由此控制舵机的舵面偏转,从而使机械臂实现夹取,搬运等功能。系统整体框图如下:
本装置通过STM32单片机的IO口感受由外部控制旋钮输入的电压变化,将其由模拟信号转变为数字信号,通过已经编写好的主函数程序,控制其他IO口输出PWM波,使舵机偏转,进而实现对机械臂运动的控制。
四、系统测试
机械臂的系统测试是开发过程中的重要环节,系统整机调试对系统运行过程中控制效果的好或是坏有着至关重要的作用,所以,必须进行系统软件、硬件的调试。也就是说一个良好的机械臂控制系统必须经过系统调试才能达到控制系统预期的目的、。因为机械臂工作在高风险的环境下,所以它必须是可靠的,对于这样的硬件,其稳定性要求必须很高。一般的情况下首先进行硬件的调试,只有在确定了硬件电路正常的前提下,进行软件的调试才是有意义的。所以,硬件、软件的调试在整个系统的调试过程中都是非常重要的
五、总结
随着机械臂技术的不断成熟,,其在各种领域的应用愈加广泛。民航机务助手机械臂的设计目的在于探索机械臂在民航领域的应用。本设计以STM32的单片机作为控制核心,将舵机和步进电机结合,作为本系统的驱动装置。在整个系统的设计中,硬件的设计是本论文研究的重点,芯片的选型是系统硬件设计的保证,并且辅以可靠性分析为指导,保证了系统运行的可靠性和稳定性。通过编写控制程序,使主控制器输出PWM 波实现对各个关节位置的控制。其亮点在于设计的三套可拆卸的臂端装置。实现了机械臂的夹取搬运物体,吸附浸塑零部件,抽取残余油液的功能。实现了机械臂功能的多样化。
实验结果表明,本文设计民航机务助手机械臂在在机务领域有较高的使用价值,在操作灵活度、控制精度、易操作性等方面都表现出良好的性能。
【参考文献】
[1]高微,杨中平,赵荣飞.机械手臂结构优化设计[J].机械设计与制造,2006,(01) 13-15.
[2]贾伟涛.单片控制机械手臂的设计与制作[J].实用电子制作—机电制作,2006,(05) 33-34.、
[3] 潘沛霖:四自由度折叠式机械手的结构设计与分析,哈尔滨工业大学学报,1994(4):第26卷.
[4] 李团结:机器人技术,北京:电子工业出版社,2009.
[5] 蔡自兴:机器人学,北京:清华大学出版社,2000:154-155
猜你喜欢
科技资讯(2017年3期)2017-03-25
现代电子技术(2014年21期)2014-11-07
