基于D-H矩阵的挖斗可偏转挖掘机工作装置运动学建模与分析
2018-06-07 01:40:08张晴晴龚智强
绥化学院学报 2018年6期
张晴晴 谢 傲 龚智强
(巢湖学院机械与电子工程学院 安徽巢湖 238000)
液压挖掘机是目前工程上进行土方挖掘工作最主要的机械之一,在国内外众多工程领域均有广泛应用[1]。传统的液压挖掘机主要由动臂、斗杆、挖斗,及其相应的驱动油缸组成,当基座固定时,工作装置只能在同一平面内作业,若完成前后左右“十”字交叉轨迹的特殊挖掘任务,需要较大工作空间。随着基础建设地域和领域的不断拓宽,适应狭小空间并能完成多方位挖掘任务的挖掘机工作装置显得尤为重要。通过对挖掘机驾驶人员的实际调查得知,在基座固定不转动的情况下挖斗可实现前后和左右多方位挖掘作业的工作装置,将有利于在较小的工作空间内完成复杂的挖掘工作。目前河北工业大学的张换高等人[1]提出了一种挖掘机工作装置旋转机构可实现上述动作,该机构的动臂前端设有旋转臂,旋转臂可相对动臂左右旋转,从而带动斗杆、挖斗,相对于动臂左右旋转,可在一定程度上提高挖掘机工作装置的灵活性。但是该机构在工作时,挖斗、斗杆、旋转臂均要发生相对转动,导致其工作范围仍较大,灵活性有限,且旋转臂和动臂之间的连接强度得不到保证。
本文作者针对上述问题,设计了一种新型挖斗可偏转挖掘机工作装置及其关键零部件偏转油缸[2-3]。为了研究该装置的结构特性,本文将通过创建连杆坐标系,建立D-H矩阵方程,以及数值仿真分析等方式获取其挖斗齿尖在Z轴的最大挖掘位置和在X-Y平面内的工作区域,作为判断依据进行研究。
一、挖斗可偏转挖掘机工作装置的结构
为了使挖斗在机身和动臂保持不动的情况下转动,需要给挖斗提供一个转动的动力源,因此本文在斗杆的上端设置了一个偏转油缸,具体结构如图1所示。偏转油缸的底端与斗杆相连,偏转油缸的侧壁与动臂相连。工作时,偏转油缸作为斗杆的一部分参与挖掘工作,又可为挖斗提供回转动力,使挖斗实现“十”字挖掘工作[3]。
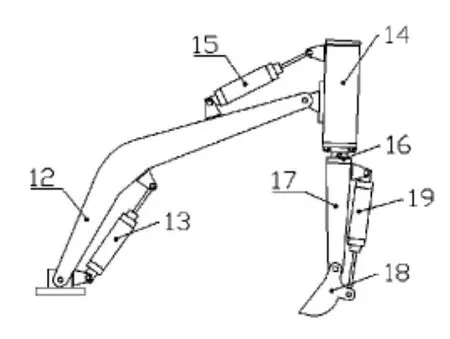
图1 挖斗可偏转挖掘机工作装置结构示意图

图2 偏转油缸主视图
二、挖斗可偏转挖掘机工作装置的运动学建模
(一)D-H矩阵法简介[4]。早在 1955年,Denavit和Hartenberg在“ASMEJournalofAppliedMechanics”论文中提出了Denavit-Hartenberg(D-H)模型,并用其对机器人连杆和关节进行建模。该模型只需给每个关节指定一个参考坐标系,然后确定从一个坐标系到下一个坐标系所进行的变换,最终实现任意两个相邻坐标系之间的变换(如图3所示),从而确定机器人的总变换矩阵。本文所设计的挖斗可偏转挖掘机工作装置可看作是连杆和关节的组合,适合于D-H模型。
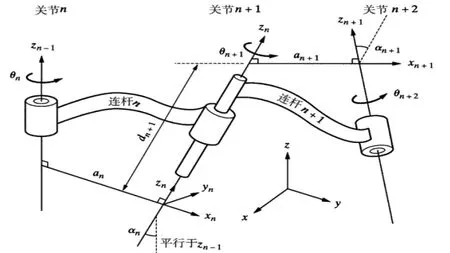
图3 通用关节-连杆组合的D-H模型示意图
其中:ai-1—关节扭转角,表示从Zi-1到Zi绕Xi-1的旋转角度;
ai-1—连杆长度,表示从Zi-1到Zi沿Xi-1的测量距离;(为便于字符区分,本文中将连杆长度记为:li-1)
di—关节偏移量,表示Xi-1从Xi到沿Zi的测量距离;
θ—旋转角,表示从Xi-1到Xi绕Zi的旋转角度。
(二)基于D-H矩阵法建立挖掘机工作装置的运动学模型。基于D-H矩阵法建立挖斗可偏转挖掘机工作装置的运动学建模,要指定工作装置中每个关节的参考坐标系,其所遵从的法则是:所有关节用z轴表示,其中旋转关节按右手规则指定方向,滑动关节沿直线运动指定方向;x轴定义在相邻两个关节公垂线方向上,若没有公垂线,可将垂直于两相邻关节轴线构成的直线定义为x轴;在参考坐标系中y轴的方向始终垂直于x轴和z轴。挖斗可偏转挖掘机工作装置的结构与坐标空间示意图如图4所示:

图4 挖斗可偏转挖掘机工作装置的结构与坐标空间示意图
为了便于建模观察,将图4所示的挖斗可偏转挖掘机工作装置的结构与坐标空间示意图简化成图5所示的连杆坐标系简图。
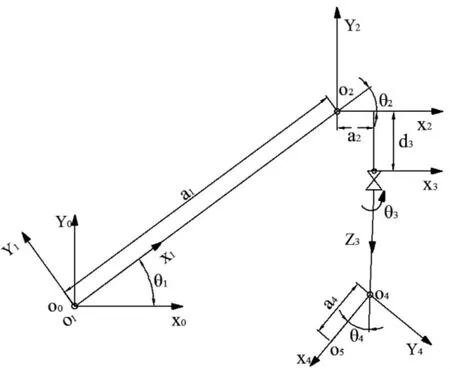
图5 挖斗可偏转挖掘机工作装置连杆坐标系简图
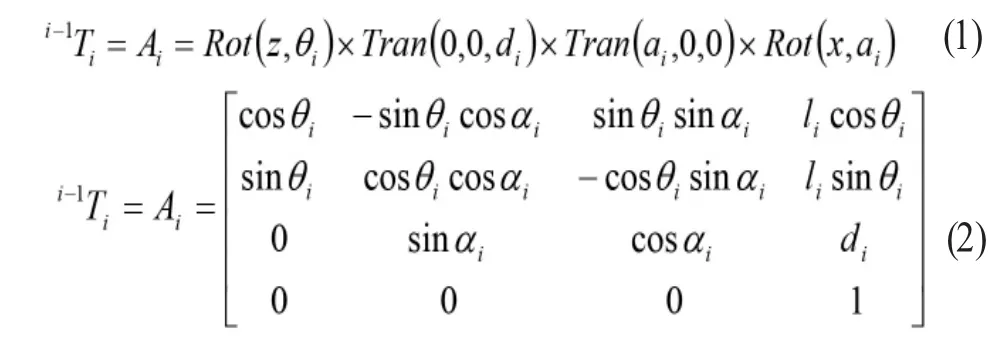
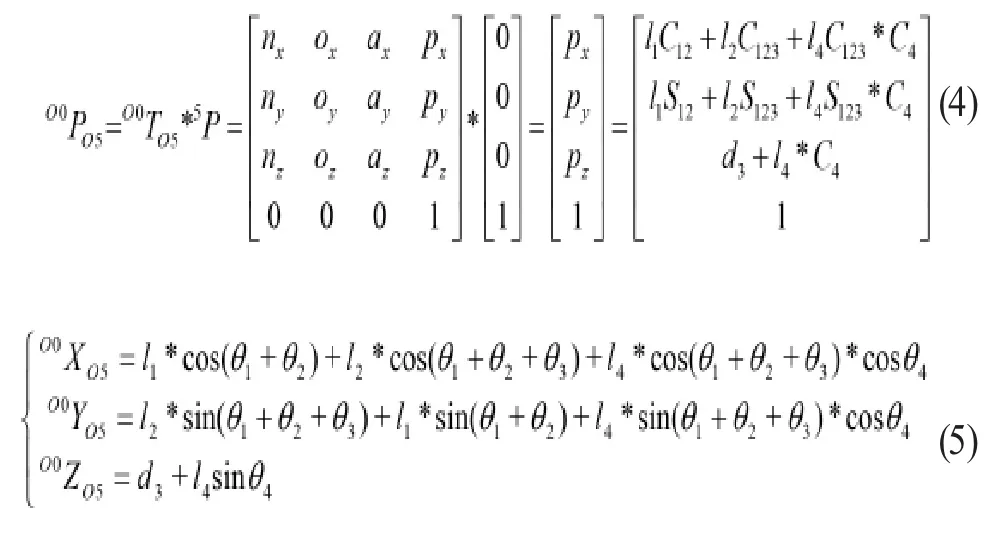
由图5可知,本文设计的挖斗可偏转挖掘机工作装置的关节姿态可用基坐标系O0-X0Y0Z0和其他转换坐标系O1-X1Y1Z1、O2-X2Y2Z2、O3-X3Y3Z3、O4-X4Y4Z4表示,工作装置末端的挖斗齿尖所处的空间姿态可以用O5-X5Y5Z5坐标表示。为了计算工作装置末端的挖斗齿尖所处的空间姿态,需要将其所处坐标转O5-X5Y5Z5换到基坐标O0-X0Y0Z0下表示。连杆坐标系OI-XIYIZI相对于Oi-1-Xi-1Yi-1Zi-1的坐标转换i-1Ti如公式(1)、(2)所示[4-5]:
从图5中提取挖斗可偏转挖掘机工作装置机构中各关节和连杆参数,如表1所示。

表1 D-H参数表
将表1所示得参数代入i-1Ti矩阵,可得到O0TO1、O1TO2、O2TO3、O3TO4和O4TO5,挖斗齿尖所处的空间姿态的坐标转换O0TO5如公式(3)所示:

其中:

挖斗齿尖在坐标系O5-X5Y5Z5中的位置坐标5P=[0 0 0I],则其在基坐标中的位置可用模型公式(5)表示[6]:
三、挖掘机工作装置的运动学模型分析
机器人手臂的运动学研究内容是机械手各个连杆坐标系之间的位置关系,从而进行机械手的运动仿真,验证结构设计是否合理,继而进行结构优化[5]。挖斗可偏转挖掘机工作装置是由许多连杆经由关节连接而成的运动系统,类似于机器人手臂。本文借鉴机器人手臂的运动学理论,研究挖斗可偏转挖掘机工作装置的运动学特征。
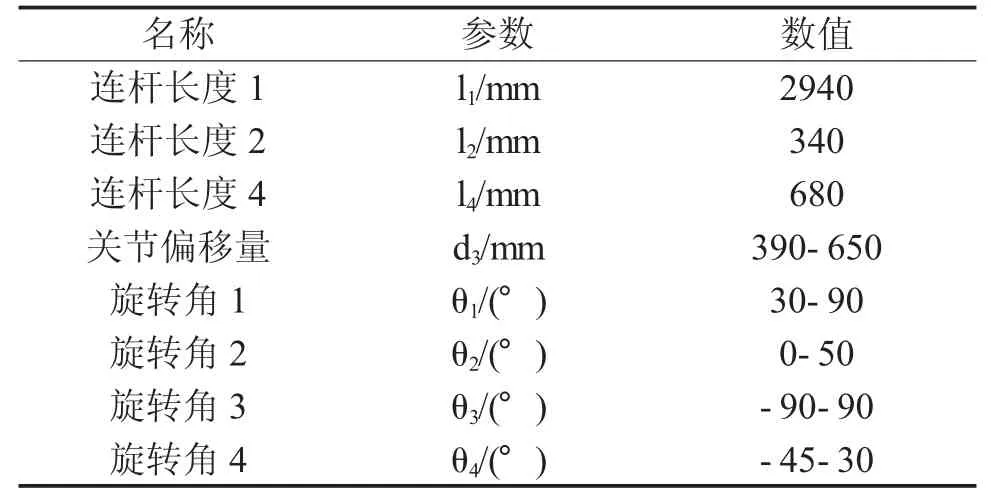
表2 仿真参数数值表
利用MATLAB数值仿真工具,将表2所示的各项仿真参数带入模型公式(5)中,并将仿真结果与普通挖掘机的相应工作状态进行比较,从而获得如图6所示的挖斗斗尖在Z轴方向的工作位置变化情况;另外将挖掘机斗齿齿尖在X-Y平面内运动散点稀释后得到如图7所示的挖掘机斗齿齿尖的X-Y平面内的运动区域图。
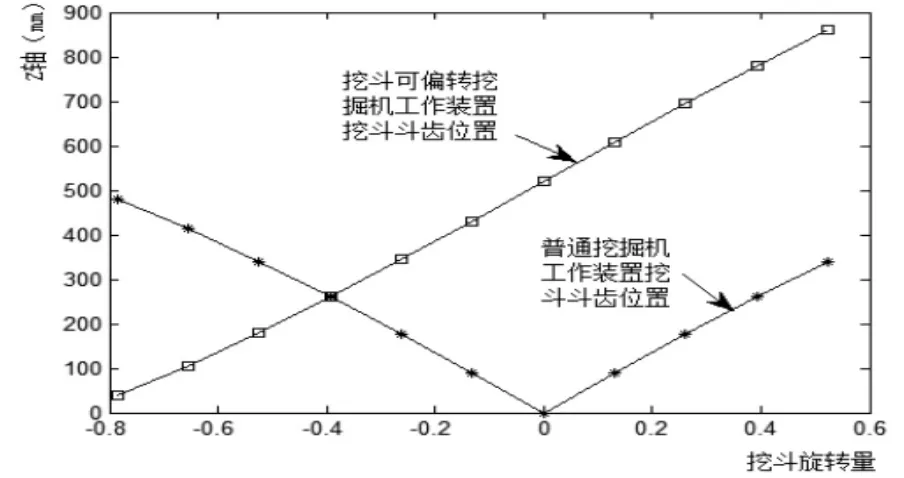
图6 挖斗斗尖在Z轴方向的工作位置
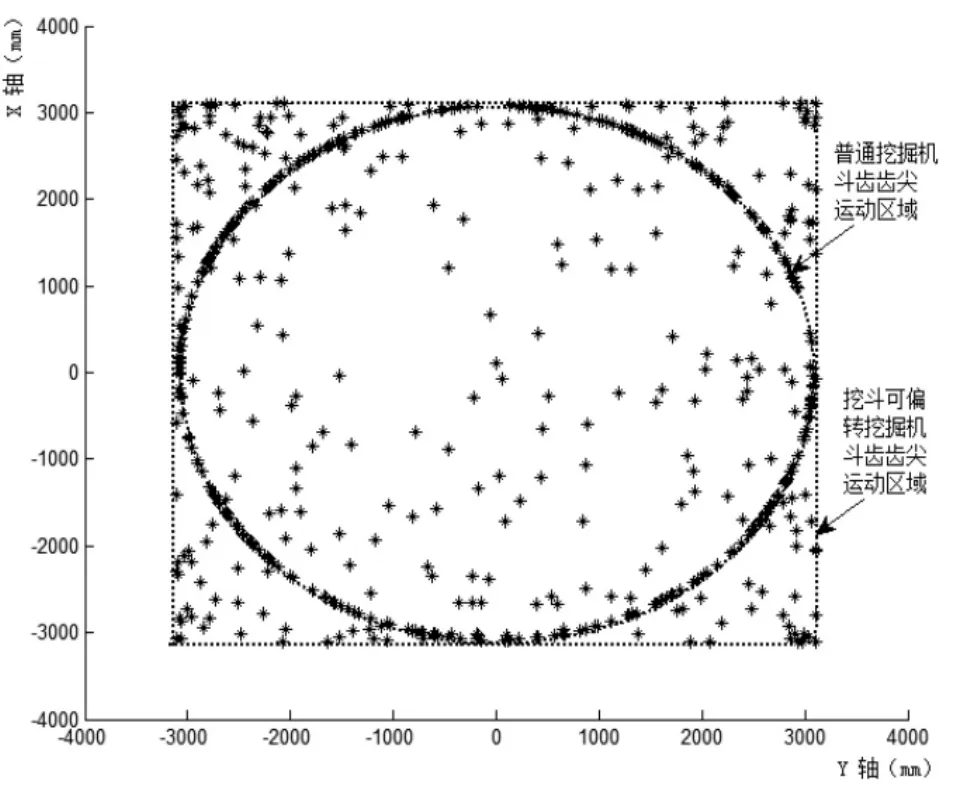
图7 挖掘机斗齿齿尖的X-Y平面内的运动区域图
从图6中我们可以看出,挖斗可偏转挖掘机工作装置挖斗齿尖在Z轴的最大挖掘位置(本文未考虑挖掘机基座的旋转运动)接近900mm,达到862mm;当θ3=0°时,挖斗无发生旋转,挖斗可偏转挖掘机工作装置可看作是普通挖掘机工作装置,此时挖斗齿尖在Z轴的最大挖掘位置接近500mm,达到478mm。因此,挖斗可偏转挖掘机工作装置挖斗齿尖在Z轴的最大挖掘位置增加了80.3%。
从图7中我们可以看出,挖斗可偏转挖掘机工作装置斗齿齿尖在X-Y平面内运动散点分布区域,即挖斗斗尖的工作区域近似为正方形,经计算其面积为39.52m3,当θ3=0°时,齿尖在X-Y平面内运动散点分布区近似为圆形,经计算面积为32.16m3。因此,挖斗可偏转挖掘机工作装置挖斗齿尖的工作区域增加了22.9%。
四、结语
“工欲善其事,必先利其器”,一款灵活性好的挖掘机,为挖掘工作提供方便。本文利用工业机器人的设计方法和理念分析了一种新型的挖斗可偏转挖掘机工作装置的结构性能,结果显示: 挖斗可偏转挖掘机工作装置挖斗齿尖在Z轴的最大挖掘位置增加了80.3%,在X-Y平面内的工作区域增加了22.9%,验证了其工作的灵活性,为其实践应用提供理论依据。但本文只做了理论计算与分析,未进行实验测试,后续重点工作应着力于实验测试。
[1]张焕高,董延庆,檀润华.一种挖掘机工作装置旋转机构[P].中国专利:ZL201210120520.7,2014-06-11.
[2]张晴晴,谢傲.一种挖掘机挖斗摆动机构[P].中国专利:ZL201520870150.8,2016.04.06.
[3]张晴晴,谢傲,龚智强.挖斗可偏转挖掘机工作装置结构设计与分析[J].绥化学院学报,2017(12):146-149.
[4]蔡自兴.机器人学[M].北京:清华大学出版社,2009.
[5]孙树栋.工业机器人技术基础[M].西安:西北工业大学出版社,1996.
[6]黎波,严骏,曾拥华,等.挖掘机工作装置运动学建模与分析[J].机械设计,2011(10):7-10.
猜你喜欢
液压与气动(2024年4期)2024-04-25 10:58:58
机械设计与制造(2022年7期)2022-07-27 13:53:58
装备制造技术(2020年4期)2020-12-25 05:26:14
科学技术创新(2020年32期)2020-11-05 09:51:54
消费导刊(2020年1期)2020-07-12 08:00:34
成组技术与生产现代化(2019年3期)2020-01-14 02:11:58
金属加工(热加工)(2018年10期)2018-10-26 08:04:36
建筑机械化(2018年6期)2018-06-29 08:18:56
有色金属设计(2015年2期)2015-02-28 21:08:56
建筑机械化(2015年7期)2015-01-03 08:09:04