
基于电平盲区检测原理的LED失效故障分析方法
2018-06-07 05:05:06李祥兵王春才肖义武赵晓茹
汽车电器 2018年5期
李祥兵,王春才,肖义武,赵晓茹
(神龙汽车有限公司技术中心,武汉 湖北 430050)
随着全球经济的持续发展,资源短缺、环境污染问题日益凸显。世界各国的节能环保意识不断加强,LED半导体光源取代白炽灯已经成为国际照明领域的潮流。由于LED的诸多优点能满足汽车灯具对节能、安全、舒适、豪华、环保和体现高科技等多方面的要求,汽车灯具的LED光源已成为国际发展方向和主流。中国是世界上最大的潜在汽车市场,今后对LED汽车灯具的需求将越来越大,开发和完善既能满足大批量的生产又能满足高品质要求的LED汽车灯具的制造技术也越来越成为当务之急。
LED是一种直接将电能转化为可见光的器件。根据光与功率之间的当量关系,Km=683 lm/W,也就是说1W的辐通量在最理想的情况下(黑体辐射)可能产生683 lm的光通量,所以,即使LED的光效达到当前预期的200 lm/W,也不能将全部的能量转换为光能输出,其余大部分都转化成了热能。从当前比较权威的数据来看,LED在输入电能后,只有约15%~20%的能量转换为光能,而其余多达80%以上的能量都转化成了热能。因此,从LED的能量转化模式来看,LED本身是一个对温度极其敏感的元件,LED照明产品广泛推广应用的关键级技术之一就是LED在各种情况下的可靠性,防止其异常失效。
1 盲区电平监测的理论基础
1.1 LED调光原理实现
对于采用LED光源来实现多功能的驱动电路,一般采用PWM(脉宽调制)来实现多种不同亮度的LED功能。
在PWM控制系统中,LED的连接方式通常为:阳极通过一个齐纳二极管与电源相连,阴极为LED控制端,通常连接一个MOSEFT管,用于快速通断LED串。LED驱动上的控制信号加到MOSEFT管的栅极,通过脉冲信号快速地开关这串LED。当栅极为高电平,此时MOSEFT开关激活,源极和漏极接通,LED发光。反之,当栅极得到一个低电平时,开关管的源极与漏极截止,此时LED处于熄灭状态。MOSEFT开关切换的快慢,由PWM的频率来确定,而每次打开与关闭之间间隔的时长,由PWM的占空比来确定。在本例中,芯片依靠单独的PWM模块采集外界开关信号,通过软件编程获取一个精准的PWM信号。
1.2 PWM控制的盲区电压控制
在现代电子技术控制中,PWM波形的良好控制是实现信号良好输入的重要前提。在实际运用中,当电平从低电平向高电平转化的过程或者从高电平向低电平转向的过程,并不是阶跃信号,而是存在一个上升沿或下降沿(如图1中a、b),由于a、b既不是处于高电平也不是处于低电平,因此属于信号控制的盲区,控制器将无法识别和判断,导致系统可能会出现误判。对于LED控制器而言,由于LED本身的响应时间非常短(一般为几十微秒),如果a、b持续时间过长,那么由于控制器的误判,将导致LED出现瞬间点亮或熄灭的现象,引起客户抱怨。

图1 盲区电压产生机理
通常的处理措施,就是通过软件延时的方法,将a、b两段区域通过软件来判断是否进入盲区,但这种方式由于系统中电容的电荷累计效应,仍然会出现软件误判的情况。
2 东风标致4008日间行车灯的实现方式
图2为东风标致4008前照灯与车身之间的电器连接方式。其中,前照灯LED模块单元分为两部分:LED驱动板和LED电路板。LED电路板主要集成LED光源以及相关的LED热敏电阻,用于实现LED的发光功能;LED驱动板是整个LED模组的控制模块,主要实现各个LED功能之间的逻辑控制、诊断、LED的热保护以及LED驱动板的热保护。
LED前照灯与车身之间是通过LED驱动板来实现供电、诊断和相关信息传输的。在本项目中,该LED光源主要实现两种功能:DRL(日间行车灯功能)和PL(位置灯功能),这两个功能共用同一搭铁线(GND)。

图2 标致4008前照灯与车身之间的连接方式
3 标致4008日间行车灯故障失效分析
东风标致4008在开发过程中,曾出现LED日间行车灯异常熄灭的情况,通过各种手段都不能再现故障。
图3为通过示波器监测到的位置灯与日间行车灯相互切换瞬间的电压变化情况。

图3 位置灯切换成日间行车灯瞬间监测的电压
根据LED驱动控制逻辑的设计原理,LED由位置灯转换到日间行车灯的100 ms期间,LED驱动会检测LED两端电压,如果两端电压小于9.2 V时则软件判断为短路;大于20 V则判断为断路。
在实际的验证试验中,发现故障件重新通电后DRL可以恢复点亮,因此物理上的短路和断路是可以排除的。通过示波器分析发现:PL切换到DRL时,LED电流和两端电压存在脉冲,当电流不为0时,LED驱动会启动对电压的采样检测。如图3所示,正常状态下,检测时的电压值在11 V左右。由于11 V电压处于断路和短路的门槛电压之间,即LED驱动处于盲区监测状态,在这种情况下, LED驱动将无法对LED的状态进行判断。
在实际电路设计(图4)中,在位置灯与日间行车灯的输入端(即保护电路),都有电容C1/C2对车身的异常波形进行去噪滤波。在日间行车灯与位置灯的反复切换过程中,由于电容中电荷的累积效应,经过多次切换后,LED两端的电压会高于20 V或低于9.2 V,即出现真正意义上的短路或断路保护,从而将LED熄灭。
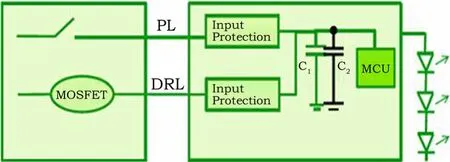
图4 LED驱动控制的保护电路
通过深入分析,在PL切换到DRL瞬间,BSM(车身控制器)输出给LED驱动两端电压由于PL关闭而下降,而DRL开启未上升到正常电压,可能会存在小于4.5 V(LED驱动正常工作电压)的情况。通过模拟试验,有意拉长T1的时间,不到1 min,故障被成功再现,即DRL失效。
经过分析确认,在低于4.5 V状态下,驱动对11 V的电压误判低于9.2 V但大于7 V。
4 解决方案分析
从上述分析来看,日间行车灯与位置灯之间相互切换过程中,由于组合开关本身是一种机械结构,机械触头在接触过程中的动作状态会发生振动。
机械开关的触点从断开到闭合,或从闭合到断开,从表面上看只经过一次变化,实际上,开关的触点在此过程中将会发生抖动。换句话说,从断开到稳定地闭合的过程中,开关要经过若干次的接通和断开;从闭合到完全断开过程中亦如此。在电平发生变化时,其前后都有无数个小脉冲,其持续的时间根据按键触点的材料不同而不同。对通用继电器而言,一般认为抖动持续时间为10~40 ms。尽管这种变化很难用肉眼和简单的仪表测出,但是用计数器或示波器则可以准确地测出机械开关动作的波形。
由于这种按键噪声的存在,导致实际从高电平到低电平的过程或者从低电平到高电平的过程,都必须经过一段时间才能完成,因此,日间行车灯与位置灯之间相互切换过程中出现盲区检测电压应该是一种正常现象。
基于以上分析,在数值电路中,系统出现控制盲区是一种正常的现象,如何尽可能降低盲区电压出现时长对系统的影响,是控制LED出现异常瞬间熄灭的关键。图5为本项目采用的创新思路:当系统在低电平阶段出现误判时,试图将低电平对应的阈值电压提高或降低;当系统在高电平阶段出现误判时,试图将高电平对应的阈值电压提高或降低,从而扩大或缩小检测范围。从图5中,对低电平,系统将由之前的D点转移到A点进行判断;对高电平,系统将由C点转移到B点进行识别判断。

图5 盲区电压检测参数优化原理
在东风标致4008前照灯LED日间行车灯的验证试验后发现,当开关在反复切换过程中,存在电压低于9.2V的情况,即低于软件设计下限值9.2V,此时,系统出现误判。通过将控制电路板的软件进行优化,将低电平电压由之前9.2V降低到7V,基本消除了LED的异常熄灭问题。
5 实施效果与结论
软件优化阈值前后对比见表1。
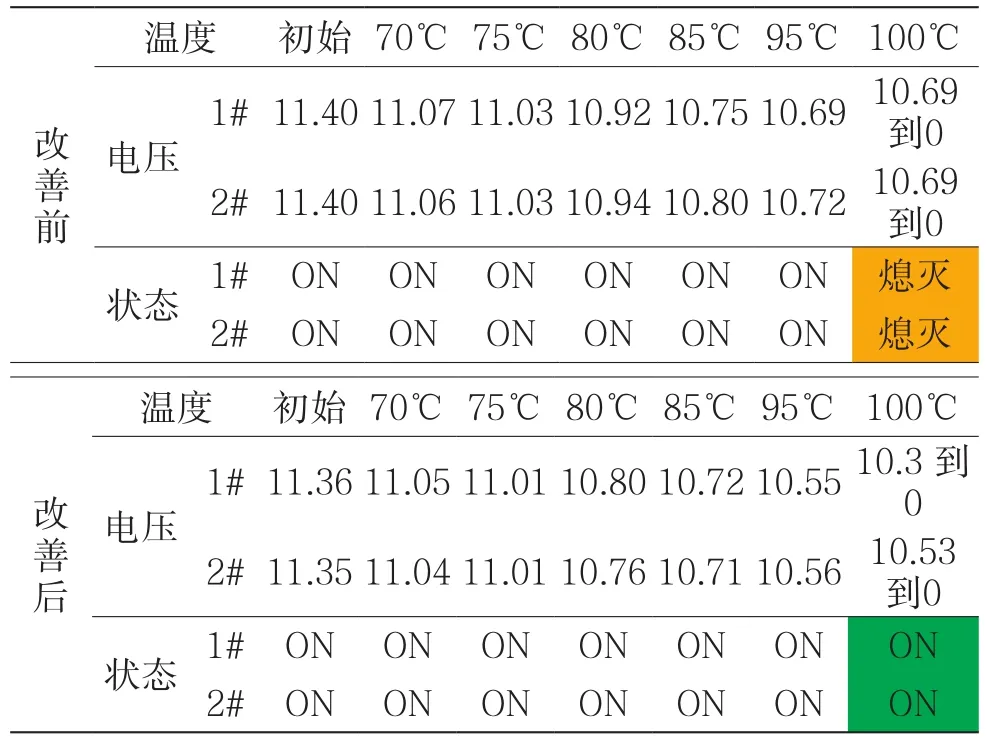
表1 软件优化前后对比
通过以上对比可以看出,采用基于盲区电平检测原理优化系统软件后,标致4008日间行车灯在车灯的正常环境温度范围内,完全消除了异常熄灭的问题,因此该方案是一种行之有效的解决LED因电路中阈值设置不当导致的LED异常熄灭的方法。
该盲区电平检测原理是在现有PWM控制策略的优化,是现有LED控制技术的补充。后续的研究中,将通过构建数学模型,对不同的PWM控制单元,通过简单的方式来得出盲区电平检测中的具体参数。
[1] david Gavio, Mario J.Crespo. PWM series Dimming for Slow-Dynamics HPF LED Drivers: the High-Frequency Approch[J]. IEEE transactions on industrial electronics, 2012,59(4).
[2] 李祥兵. 汽车LED灯具闪烁中按键噪声控制机理研究[J].汽车电器,2017(2):18-21.
[3] 李祥兵,吴小兵,王春才,等.车灯LED风扇模型减噪措施研究[J].汽车科技,2016(6):44-48.
猜你喜欢
大学物理实验(2023年5期)2023-10-27 13:04:52
轨道交通装备与技术(2021年5期)2021-11-19 11:46:46
华人时刊(2019年13期)2019-11-26 00:54:38
车迷(2019年10期)2019-06-24 05:43:12
汽车维修技师(2018年7期)2018-12-07 08:23:44
车迷(2018年12期)2018-07-26 00:42:24
重庆文理学院学报(社会科学版)(2017年2期)2017-05-03 03:18:43
铁道通信信号(2016年5期)2016-06-01 12:10:20
家用汽车(2016年4期)2016-02-28 02:23:47
汽车科技(2014年6期)2014-03-11 17:46:25
