
基于PLC开放式立体车库控制系统设计
2018-06-06 03:00陈艳玲
电气技术与经济 2018年2期
陈艳玲
(盐城生物工程高等职业技术学校)
0 引言
近年来,随着中国的汽车工业以及消费体系快速的成长,私家车慢慢演变为日常生活中较为多见的工具之一。国内汽车的发展速度过快,社会各领域未能实现同步的发展,停车行业即位于最初的发展环节。汽车规模的高速提升,引发了相对较多的交通压力。而较为显著的矛盾即汽车规模增长的同时,停车位未能实现同步发展,造成大城市面临车满为患的问题,停车空间存在明显的欠缺。停车位的不足,长期以来都是小区以及单位等极为困扰的问题。
立体车库因为占用范围相对较少,可高效地开发立体空间,使用了多层停放的方案,因此可以较为理想地处理停车难和土地不足的冲突等问题,对该技术进行大范围的推广,可以更好地处理城市所存在的停车难题,从而实现更为理想的现代化建设效果。当前,立体车库实现了较为理想的发展。伴随当代私家车的规模不断提升,立体车库需要有效解决各种人群的客观需求,这需要立体车库实现更为多样化的发展。立体车库在优化基础停车环境的过程中,同时还面临一些较为显著的问题,核心为高成本和能耗、架构和管理过度复杂、交互体验较差和使用耗时过久等。这些问题导致立体车库在较小的停车场中未能获得有效运用,因此需要设计成本低廉、较为稳定以及交互体验优秀的新式产品,来解决当代小规模停车场的客观需求。
本文研究的立体停车库有着维护成本低廉、流程耗时较短、交互体验优秀等特征,可以满足当前低成本、小面积停车场的客观需求,能够缓解当前城市存在的停车难题,有着光明的市场前景。
1 立体车库结构及工作原理
1.1 立体车库结构
本文规划中的车库属于对面双开的方案,划分为两排,其有着共同的中间通道。通道的两侧划分成为A、B区,1区作为1排,每区划分为三层六列共计有18个停车位,整体的车库设计了36个停车位。实际的架构视图如图1所示。
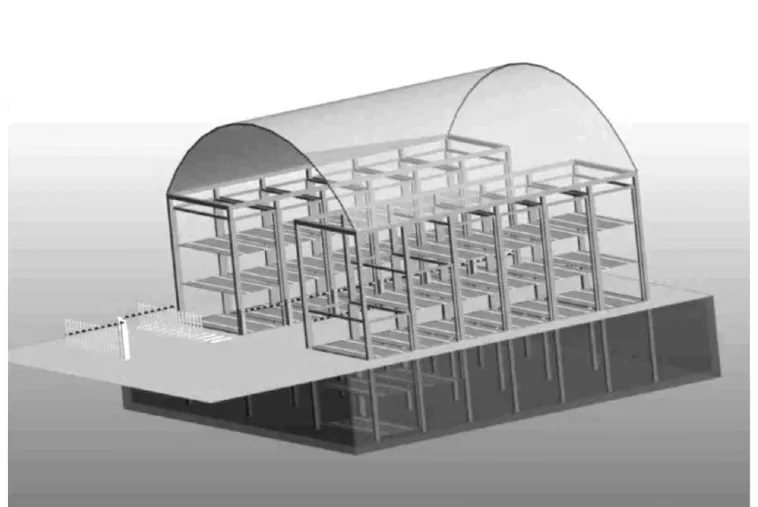
图1 立体车库框架结构
在该车库的设计内,建设了两个载车板单元高度的配套地坑,从而使得整体的车库架构划分为地上三层和地下两层。以列作为载车模块的划分标准,存取环节中同列的三个载车板进行同步的升降操作,通过位于架构顶部位置的驱动元件来负责驱动程序。默认位置属于地坑之处,从而使得上层载车板与地面保持平行的状态。该设计可以在未运行的情况下,避免对框架构成额外的负重压力,而且也可让停放于三层的车辆直接进入其中而无需运行,降低能源以及机械的损耗效应,减少存取程序耗费的时间。地面一层的载车板之前设置了对应的档杆,在完成验证程序后会开启档杆。具体布置如图2所示。
1.2 立体车库工作原理
图3为立体车库控制系统的基础框图。其中包括计算机、摄像头、打印机以及传感器等多个元件。参照各个设备功能所存在的差异,在各个架构中,整体的网络界定为三层,分别为监控层、控制层以及执行层。三个层级依靠通信协议来实现基础的通信进程。

图2 单列车库结构
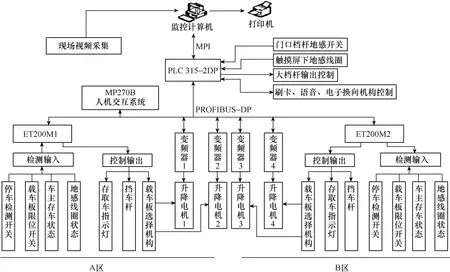
图3 立体车库控制系统结构
2 立体车库控制系统硬件设计
硬件方面核心由PLC、触摸屏、分布式I/O以及变频调速等基础构成。具体架构如图4所示。
在规划的立体车库控制体系内,采用S7- 300系列PLC来充当主控,CPU为315- 2DP,交互设备为MP270B触摸屏,其和PLC有着良好的兼容效果,变频器MM440,其有着性能优势并获得了普遍的运用。因为立体车库内继电器、接触器以及指示灯等相关的输出点有普遍的存在,传感器以及限位开关等有着相对偏多的输入点,同时到PLC机架的距离相对偏远,导致接线存在明显的不便,使用分布式I/O模块ET200M来进行相对较远位置的连接操作。在车库的运转环节中,采用PLC串口来控制相关的刷卡、语音以及换向机构。串口选择PLC的扩展模块CP341。车库之外存在相对较少的输入输出量,此类传输接入至PLC机架的I/O扩展SM321、SM322。
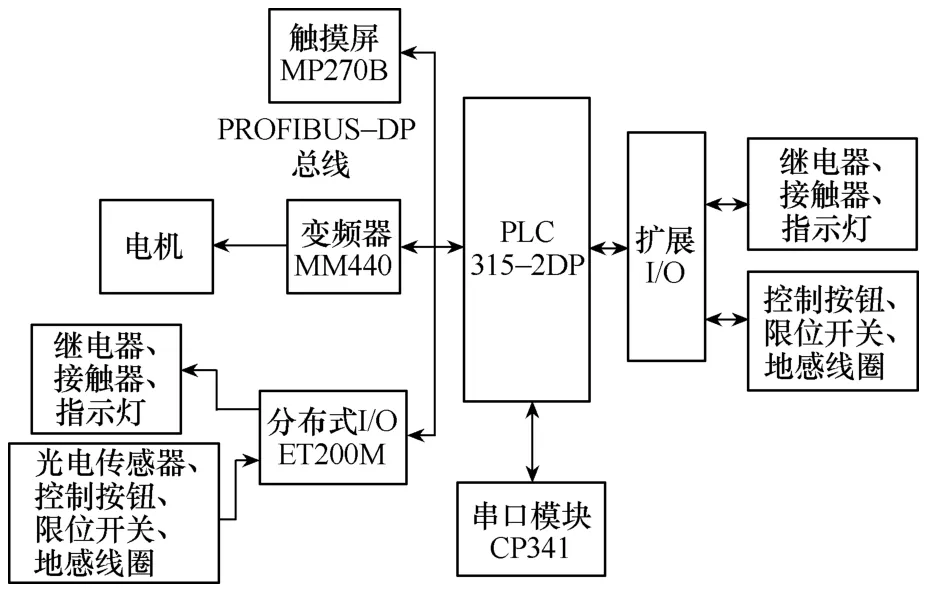
图4 PLC现场控制系统框架图
为便捷、稳定地对设备进行控制,同时确保现场布线有着更高的科学性以及便捷性,规划中的系统使用了PROFIBUS- DP系统。以PLC CPU315- DP来构建主站,采用MP270B、MM440以及ET200M来构建从站。所构建的整个PROFIBUS- DP现场总线网络,包括一个主站,一个MP270B,两个ET200M,四台MM440,同时各个站点在整体的总线内有着唯一的站地址来充当基础标识,以此来划分多个类别的设备。参照实际功能存在的差异,以网络层次的角度来分析,可界定为监控、控制及执行三个层级。
3 立体车库控制系统软件设计
软件核心为三点基础构成:其一,上位机监控;其二,PLC应用;其三,触摸屏交互。在分析中,重点探讨PLC和交互两方面的系统。整体车库控制依靠PLC应用来实现,PLC作为整体系统的重点构成,使用的软件为STEP 7,设计流程涵盖了硬件组态、主程序以及串口通信等多个基础构成。触摸屏用于监控车库的运转程序以及车位的空闲状态,由人机组态、触摸屏和PLC通信等基础构成。
3.1 PLC程序设计
S7- 300使用PROFIBUS- DP总线来进行控制,先使用STEP7来开展网络构建以及组态配置等操作,随后针对PLC开展编程设计。
硬件组态要求构建项目、规划机架、确定CPU型号以及配套的传输模块。PROFIBUS- DP构建环节中,要求构建基础的主站以及从站,设定各站的地址、波特率等关键参数。硬件组态的核心目的为划分设备的基础资源。
在系统内要求组态的设备包括PLC主站、ET200M与MM440从站。触摸屏组态采用WinCC flexible2008来开展,具体的参数设定与STEP 7基本一致,连接至ROFIBUS-DP总线就可以顺利运转,总线内能够不进行组态,但可在STEP 7内构建配套的HMI站,采用S7- PLCSIM 来开展仿真调试操作。
图5为主站组态的设置过程,图6为立体车库控制系统硬件组态完成的界面。

图5 系统主站及总线组态

图6 立体车库控制系统的硬件组态图
3.2 PLC控制流程
系统的基础目的为达成车库的有效运转,以此来实现车辆的便捷存取。参照车库运转程序和控制功能等方面的基础要求,得出如图7所示的流程图。

图7 车库系统运行流程
3.3 PLC和变频器之间的通信
在系统的设计中,PLC与变频器之间使用PROFIBUS- DP总线的方案来进行连接。PLC作为系统中的主站,同时以变频器来充当配套的从站。在硬件组态的环节中,CPU与变频器之间所采取的通信报文格式为PPO 1,PPO 1涵盖4PKW以及2PZD两方面的基础构成,而PKW的4个控制字用于设置变频器的基础数据,PZD可调整变频器具体的输出频率参数。LVFVI440不仅可以实现主站之间的周期性通信,同时也可以实现与主站之间进行的非周期性交流,S7- 300能够采用配套的功能块SFC 14/SFC 15来读取以及修改LVLVI440内的各项数据。
SFC14(DPRD DAT )系统功能用来达成主站读取DP从站中存储的各项数据,SFC 15( DPWR DAT)则用来达成主站对于DP从站所进行的写入操作。依靠系统功能SFC14以及SFC15来实现PLC与变频器两方面元件间的数据交换,可实现较为理想的操作效果。
调整 1号基本单元的升降电机变频器基础数据的程序设计,参见图8以及图9的基础标识,在程序之中调用读取以及修改参数的块SFC14与SFC15,功能块内的LADDR作为W#16#100,事实上属于PKW的对应起始地址,DB 11.DBB 0起步的8个字节作为所读取获得的数据,DB11.DBB 24起步的 8个字节作为要求调整的数值。
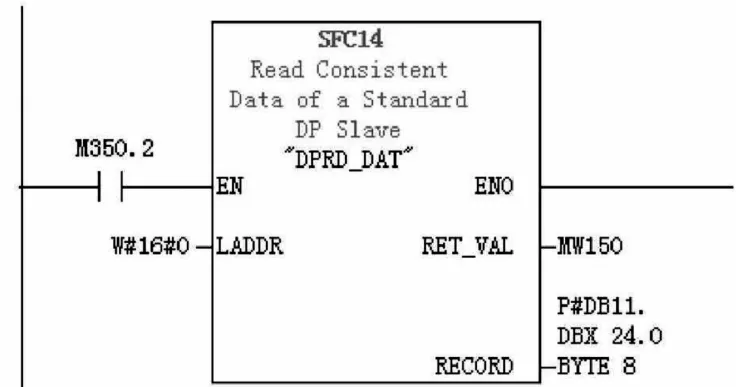
图8 读变频器的状态

图9 修改变频器参数
关于变频器参数的具体设置如下表所示。

表 变频器参数设置
3.4 PLC串口程序设计
在所设计的系统中,车主需要刷卡来完成身份信息的确认程序,PLC要求传递控制电子换向机构以及播放语音的对应指令至单片机方面,而此类通信环节的实现要求采用配套的串行通信接口,也就是PtP接口。S7- 300PLC 的CPU315- 2DP并未在CPU中进行PtP接口的集成,因此要求通过模块的方式来实现S7- 300系列PLC的扩展,可满足PtP接口需求的基础模块包括CP340与CP341。
CP340与CP341通信处理器在基础的功能以及架构等方面较为接近,模块存在三类配套的订货规格,以此来解决RS- 232、TTY、RS422/485三类接口标准的需求;但单一的模块未能同时安装超过两个的通信接口。最终在系统中选择CP341模块来解决规划中的串口通信任务,而配套的通信协议则确定为ASCII码的通信模式。
CP341模块在硬件组态环节中,已连接至对应的机架设备。在系统中选择CP341模块,随后进一步选择其中的“参数…”,从而调整CP341模块的数值,如图10所示。

图10 CP341属性设置
在Protocol选项内选定ASCII协议,如图11所示。
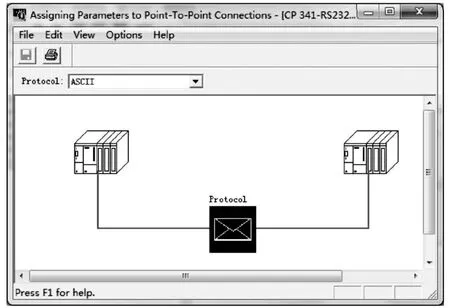
图11 通信协议的选择
双击Protocol中对应的信封图标,调整其中的ASCII通信数值,相关数值的确定需要确保和通讯对象实现良好的配合。设计中的数据为:9600bps波特率;8位数据;1位停止;不进行奇偶校验;延迟4ms。其余的各项数值均为默认的参数,最终信息如图 12所示。
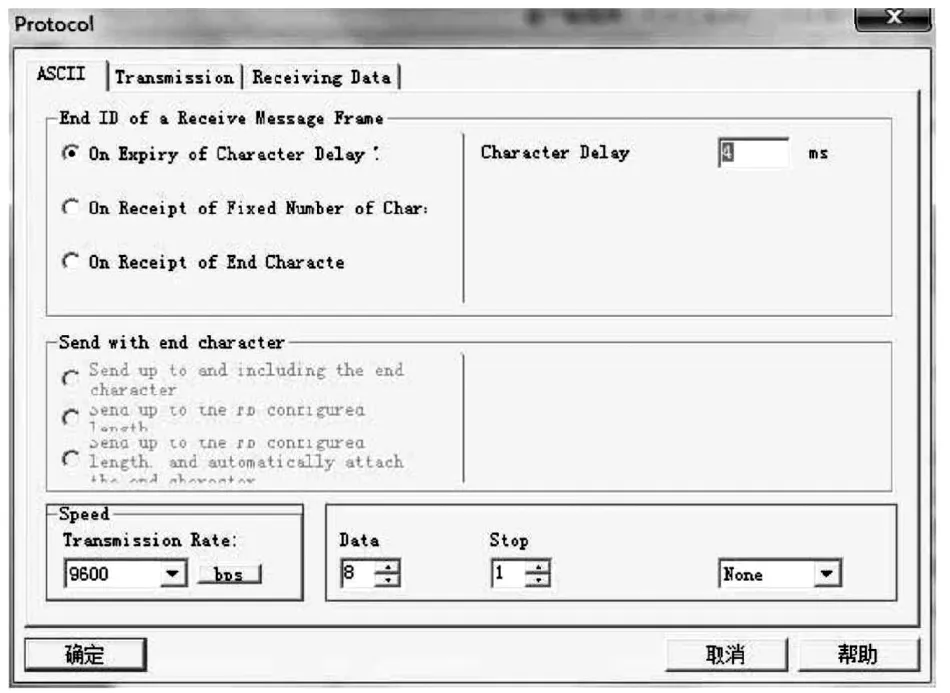
图12 通信协议的参数设定
在系统中的主循环OB1编程画面内,在指令库内使用FB8 P SND RK,针对其划分配套的背景数据块DB 8,使得参数LADDR调整为硬件组态内CP341的起始参数256。建立对应的发送数据块DB9,具体信息如图13所示。

图13 发送数据块DB9
调用CP341中对应的FB 8 P SND RK进行数据的发送,如图14所示。
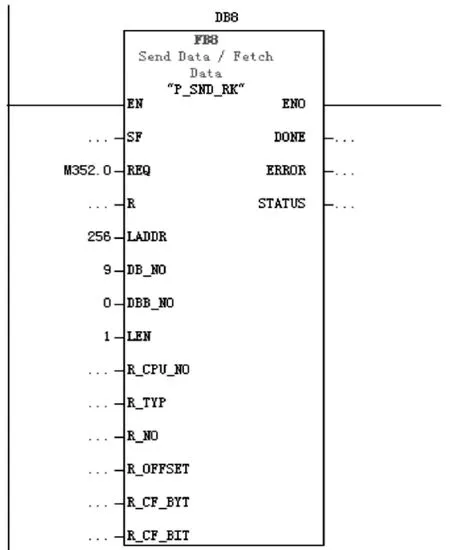
图14 调用FB8 P_SND_RK
在主循环OB1配背景数据块DB7,发送数据块DB 10,在编程画面之中,在指令库内调取配套的FB7 P RCV RK,将参数LADDR调整为CP341的起始数值256。建立对应的发送数据块DB10,如图15所示。

图15 接收数据块DB10
调取CP341中对应的FB7 P_RC V _RK来实现数据的传递,具体信息如图16所示。
3.5 触摸屏组态程序设计
触摸屏最初运用到工业方面,作为和PLC开展人机交互的配套终端。替代了传统控制台的各项功能,同时该方案可提供较为多样化的人机交互能力,例如图形显示等。触摸屏在现场中所提供的基础功能,主要包括现实以及状态的监视、相关数字信息的录入、控制以及实时报警等。

图16 调用FB7 P_RC V _RK
3.5.1 触摸屏和PLC的连接建立
在本系统的设计过程中,人机交互最终选定的器材为 MP270B,而与之配套的组态软件则确定为WinCCflexible2008,触摸屏依靠系统的DP接口来连入至PROFIBUS-DP总线实现与PLC之间的通信,系统中的网络地址是10。触摸屏与PLC的组态规划见图 17,在系统中为触摸屏所预留的通信接口确定为IF1B,波特率参数则确定为1.5Mbps,对应的配置文件确定为DP,触摸屏以及PLC的基础地址参数确定为10与5。
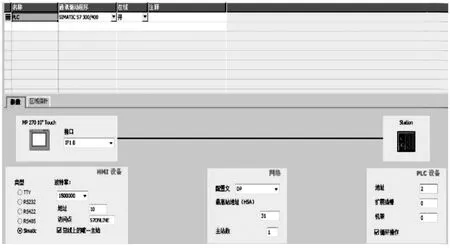
图17 触摸屏与PLC连接
3.5.2 触摸屏画面的组态
触摸屏创建画面,画面作为 WinCCflexible2008的核心元素,基础功能为操作以及监视运转中的系统,例如展示变量的具体状态以及状态值等信息。画面涵盖的基础对象包括:输出域、文本域、显示域以及图形域等多个方面的基础构成。在一个项目内或许涵盖数量较多的画面,实际的数量和触摸屏存在一定的联系。对普通用户而言,普通的触摸屏即可实现符合要求的可组态画面数,因此画面的数量也能够进行随意的增添。在立体车库系统内有着数量较多的画面,待机画面如图18所示,车主参照自身的需求选择触摸屏就可以登入到存取车系统中;车位的占用信息如图19所示,参照车库内置的传感器所传输的停放信息,从而在屏幕中展示当前的车位占用信息,车位中存在车的标识则代表着该载车板中存放了对应的车辆;具体的位置提示信息如图20所示,车主计划将自身的车辆停放至车板的过程中,屏幕中的载车板会进行闪烁的活动,从而实现提醒载车板位置的理想效果。

图18 车库待机

图19 车库车位占用状态
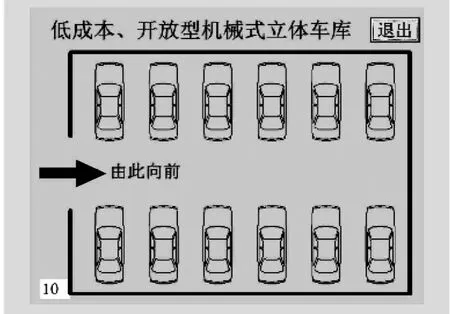
图20 车库位置提示
4 结束语
伴随当前城市化的不断发展,汽车在当代生活中的普及度不断提升,而实际存在的停车位不足的矛盾也愈加凸显。基于较小规模的停车场发展需求的考虑,本文针对住宅小区、事业单位等设计的垂直升降式立体车库可以有效解决上述问题,在未来市场具有一定应用价值。
[1] 刘晓峰. 简述汽车工厂立体车库自控系统的设计要点[J]. 自动化技术与应用, 2010(2): 62-66.
[2] 马宁. S7-300 PLC和 MM440变频器的原理与应用[M]. 北京: 机械工业出版社, 2006.
[3] 顾建凯. 基于 PLC的低成本机械式立体停车库控制系统研究[D]. 兰州: 兰州交通大学, 2013.
[4] 赵顺东, 洪秋媛. 触摸屏与 PLC在工业控制中的设计与应用[J]. 国外建材科技, 2012(3): 45-47.
猜你喜欢
建材发展导向(2021年9期)2021-07-16
装备制造技术(2019年12期)2019-12-25
中国特种设备安全(2019年4期)2019-05-20
知识就是力量(2018年7期)2018-07-11
电子制作(2017年2期)2017-05-17
海外星云(2016年7期)2016-12-01
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
创业家(2015年6期)2015-02-27
自动化博览(2014年6期)2014-02-28
河南科技(2014年12期)2014-02-27
