
一种改进的高斯滤波方法
2018-06-05 12:12:47卢晓东
地理空间信息 2018年5期
闫 冬,卢晓东
(1.中国电建集团湖北工程有限公司,湖北 武汉 430040;2.华中科技大学 生命科学与技术学院,湖北 武汉430074)
点模型是实物模型转化为数据模型的最早表现形式,可表示任意平面曲线或三维曲面。由于原始的超声数据信号存在噪音,因此滤波是三维数据建模的必要步骤。滤波的目的就是使数据更加光滑,空间曲线和曲面连续性更好,所以滤波要剔除夹杂在数据点云中的各种噪声,在使模型变得光滑的同时保持模型固有的几何特征,且要防止体积收缩和模型变形[1-3]。另外,还要兼顾修改后的曲线(面)同修改前的曲线(面)的“偏离”,以保证各项性能指标不受影响。作为一个经典问题,点模型滤波有大量算法。在地学测量领域,基于TIN和聚类的算法多用于LiDAR点云的滤波[4-5];医学图像滤波采用非局部利用图像中的相似区域抑制噪声的方法[6]。这些方法的基本思想为若某个点的值是其邻域内点的平均值,则认为点模型是光滑的,即不停地将某个点向其邻域的均值移动,其原理就是Mean Shift[7]。其中,由Taubin G提出的高斯滤波算法是一种非常有效的方法。该算法不停地对模型进行缩放,让每个点向其邻域重心移动,从而达到滤波的目的,但滤波后的结果可能会偏离原来的模型或发生变形,因此本文提出了一种改进的算法,能在光滑数据的同时,有效控制偏移。
1 算法原理
高斯滤波算法原理为:设原始点集合为{xi},i=1,2,…,n,对于其中的某个点xi,搜索到其邻域点集表示为{xj},j∈i;再根据这些邻近点计算当前点的估计值xi*,并比较xi和xi*的差距,将xi向xi*位置做一定移动;然后重复上述操作[8]。

1)计算当前点的邻域重心:式中,j为i邻域内点的编号。
2)计算当前点滤波后的位置:

满足λ>0、μ<0,它们的绝对值小于1,且μ的绝对值比λ的绝对值大的条件。因为当迭代次数为奇数时,各点向其邻域重心移动,即光滑的同时,点云模型相对于实际模型是缩小了;于是当迭代次数为偶数时,相当于在一个缩小的模型上放大,只有在大于原始缩小倍数的情况下,才有可能放大到原来模型的大小,所以μ的绝对值应比λ的绝对值大。该算法思想简单,容易理解,但在实际应用中如何确定λ、μ值,往往存在一定难度,且迭代次数一般为偶数。
鉴于此,本文提出了一种改进算法。改进算法的前两步与高斯滤波算法一致,仅将步骤2)进行多次交替操作,即当操作次数m为奇数时,按式(2)计算;当m为偶数时,按式(3)计算,然后不断迭代。

显然,改进算法与高斯滤波算法本质上是一致的,都是通过不断缩放模型,剔除噪声点。其关键差异在于,通过缩放的交替操作,减小了缩放比例(光滑系数)差异引起的滤波后数据偏离原始模型的可能性,且结果对参数的进一步依赖性减弱。滤波的结果。图2a为利用高斯滤波方法处理的结果,顶部有一定的凹陷,滤波后数据存在一定变形;图2b为改进算法处理20次的结果,相对于传统方法,其光
2 实验验证
图1 为噪声模型经过高斯滤波方法与改进算法滤波后的结果,可以看出,两种算法的光滑效果相当,但图1b发生了明显的位移(圆上半部分),而图1c位置信息保存完整,基本没有发生位移。因此,改进算法较好地保持了原始位置和轮廓大小,且消除了噪声。
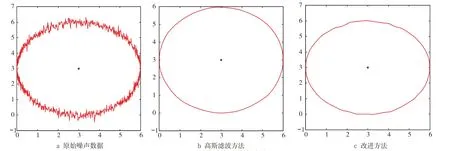
图1 两种滤波方法的滤波结果

图2 两种算法三维球面滤波结果
图2为对具有一定高斯噪声的标准三维球面进行滑性较差(可通过多次迭代解决),但数据没有显著形变,仍然是一个完整的球面。比较图1、2可知,高斯滤波方法滤波后,图1的形变较大而图2则相对较小,主要原因为原始数据中加入的噪声量不同,较大的噪声将导致相对大的偏移。
图3a中的蓝色曲线是一个接近高斯分布的曲线,曲线上存在一定噪声,利用改进算法滤波后的结果为红色曲线,显然噪声得到了剔除,且有效保持了原始数据的特征信息。图3b中黑色曲线为传统高斯滤波后的结果。比较而言,改进算法对特征的保护(峰值)是非常好的,而高斯滤波后,峰值被丢弃了。

图3 两种算法的滤波结果比较
3 结 语
本文在传统高斯滤波算法的基础上,提出了一种改进算法,通过交替迭代缩放操作,克服了确定缩放系数的难点,从而较好地解决了传统方法中在光滑数据的同时易造成数据偏离或偏移原始模型的问题。算法非常简单,实现过程容易。
[1] 胡国飞.三维数字表面去噪光顺技术研究[D].杭州:浙江大学,2005:41-47
[2] 赵静.三维激光扫描数据处理[D].扬州:扬州大学,2009:20-29
[3] 徐波,唐杰,武港山.基于CUDA的点云去噪算法[J].计算机工程,2011,37(2):224-226
[4] 于双,杨英宝,李成仁.基于模糊 C 均值聚类的机载 LiDAR点云滤波[J].测绘与空间地理信息,2015,38(2):141-143
[5] 邢旭东,王星晨,吕现福.基于高程突变 TIN 的改进机载 LiDAR 点云滤波算法[J].测绘与空间地理信息,2015,38(12):105-107
[6] Buades A, Coll B, Morel J M. A Non-local Algorithm for Image Denoising[J]. IEEE Computer on Visual Pattern Recognition,2005(2):60-65
[7] CHENG Y Z. Mean Shift, Mode Seeking, and Clustering [J].IEEE Transactions on PAMI,1995,17(8):790-799
[8] Taubin G. A Signal Processing Approach to Fair Surface Design[C]. Conference on Computer Graphics and Interactive Techniques. ACM Press, New York,1999:351-358
猜你喜欢
数学小灵通(1-2年级)(2024年4期)2024-05-14 09:30:52
吉林大学学报(理学版)(2020年3期)2020-05-29 06:32:16
小学生学习指导(低年级)(2019年6期)2019-07-22 03:33:10
自动化学报(2018年7期)2018-08-20 02:59:04
周口师范学院学报(2016年5期)2016-10-17 06:36:47
空间控制技术与应用(2015年3期)2015-06-05 14:30:31
遥测遥控(2015年2期)2015-04-23 08:15:18
四川师范大学学报(自然科学版)(2015年2期)2015-02-28 14:07:36
华东理工大学学报(自然科学版)(2014年2期)2014-02-27 13:48:48
华东理工大学学报(自然科学版)(2014年2期)2014-02-27 13:48:48
