
辐盘式挖掘装置的结构与有限元分析
2018-06-05 15:00王方艳
农机化研究 2018年2期
王方艳
(1.青岛农业大学 机电工程学院,山东 青岛 266109;2.中国农业大学 工学院,北京 100083)
辐盘式挖掘装置的结构与有限元分析
王方艳1,2
(1.青岛农业大学 机电工程学院,山东 青岛 266109;2.中国农业大学 工学院,北京 100083)
针对单株块根作物收获机具短缺、结构设计粗放的特点,分析了辐盘式挖掘装置的结构及工作参数,并利用三维虚拟样机技术建立辐盘式挖掘装置的模型。同时,根据挖掘装置的受载情况,借助ANSYS 软件,对挖掘装置的变形及应力进行有限元分析。 根据分析结果,找出挖掘装置易产生损伤部位,为后续挖掘装置的优化设计及性能提升提供理论依据。
挖掘装置;辐盘式;有限元分析
0 引言
挖掘装置是作物收获过程中重要的工作部件,决定着机具的收获性能及使用范围,影响着机具的动力消耗及适用性。当前,根茎类作物收获采用的挖掘装置主要有铧铲式挖掘装置、叉杆式挖掘装置、圆盘式挖掘装置和复式挖掘装置[1-5]。它们各具特点,分别适应不同的作物收获及工作环境,并借助传统的试验方法得到了改进和完善。其中,铧铲式挖掘装置的使用范围较广,且借助虚拟仿真技术得到了仿真优化[6-10],但不适于萝卜、甜菜等单株块根作物的挖掘收获。
随着我国经济作物生产装备的发展,萝卜、甜菜等单株块根作物的收获问题被逐渐提上日程。结合单株块根作物的特点,研制相应的机具,攻克机械化收获的技术瓶颈,已成为当前研究工作的重中之重。当前,关于萝卜、甜菜等单株块根作物的收获研究主要集中在挖掘装置的挖掘方式和挖掘阻力,即如何保证对单株块根作物的定向挖掘及顺畅收获。因此,针对萝卜、甜菜等单株块根作物生长范围较集中。在土壤中的分布范围稳定的特点,因地制宜研究挖掘机理及方式,设计合理的挖掘结构,对提高作物挖掘效率具有重要的意义。
1 辐盘式挖掘装置的结构及工作参数
1.1 主要结构
辐盘式挖掘装置主要采用滚动挖掘形式,利用1对挖掘辐盘与土壤、土壤与块根之间的作用实现块根作物挤压、拔取挖掘,既可减少土壤的挖掘量,又可避免杂草的缠绕及土壤的壅堵,为块根作物快速除土及输送环节提供了条件。辐盘式挖掘装置由挖掘辐盘、轴臂架、调节块、安装座及防漏盘等组成,结构如图1所示。其辐盘为40Mn,轴臂架为Q235,其他零件为45钢。
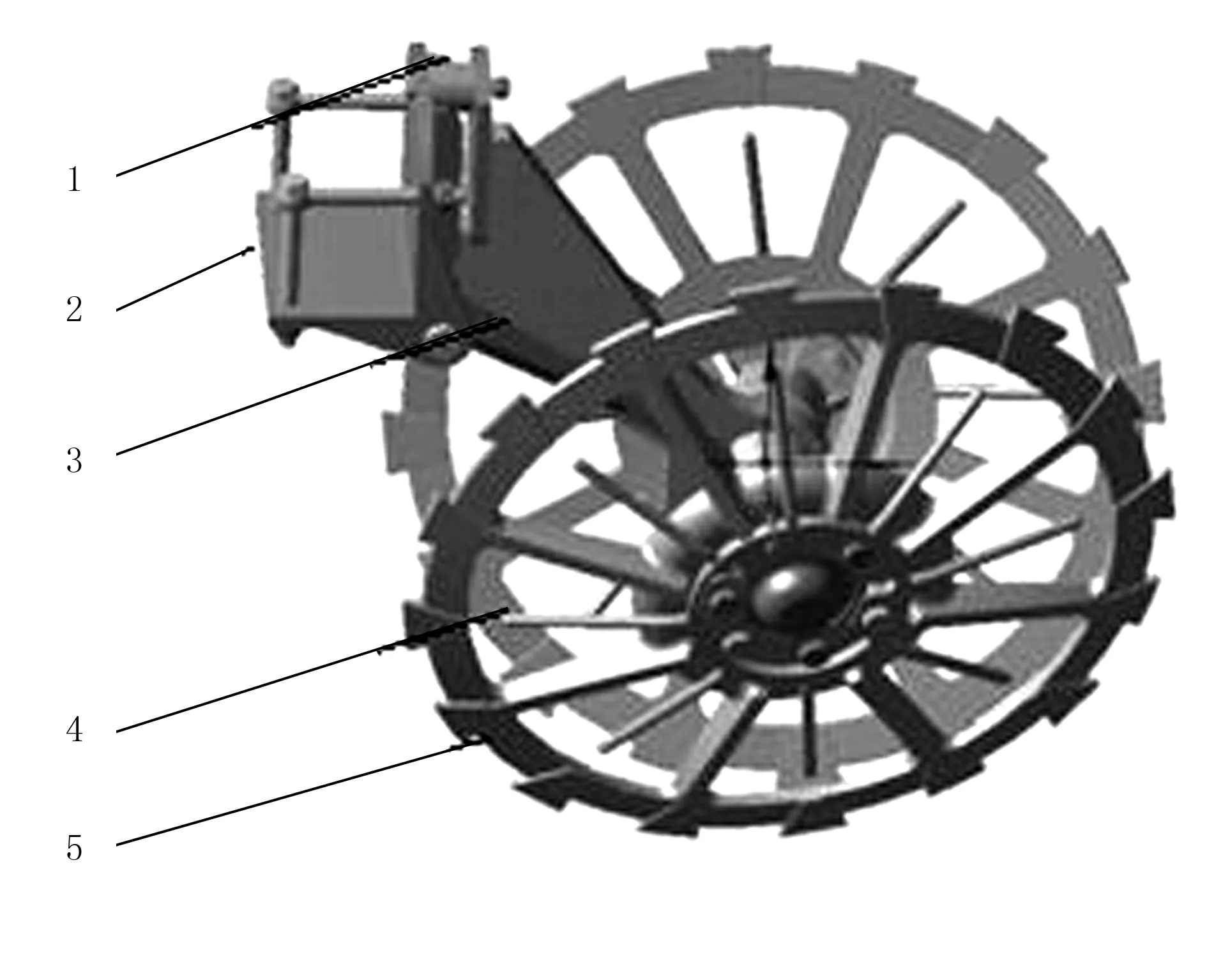
1.调节块 2.安装座 3.轴臂架 4.防漏盘 5.挖掘辐盘图1 辐盘式挖掘装置结构Fig.1 The structure of radial-disc digging device
1.2 工作参数
辐盘式挖掘装置结构复杂。挖掘辐盘为空间结构,辐盘凹面与土壤作用近似为一对三面楔的作用,辐盘凸面与土壤作用为挤压力和刮擦力。两个辐盘刃口面成一定的夹角为ε,决定着两个辐盘的张口大小,由两个辐盘刃缘的最大距离cmax、最小距离cmin及圆盘的半径R确定;挖掘辐盘的二面角所在面与垂直面的偏角为i,决定着两个挖掘辐盘刃口最小距离处的位置;挖掘辐盘与前进方向所成偏角为γ,影响挖掘辐盘的推土效果;与铅垂面成倾角为β,决定着挖掘辐盘的翻土效果。其中,倾角β及偏角γ是挖掘装置的关键参数,决定着挖掘部件-土壤-作物之间的相互作用。倾角β影响土壤在垂直方向的运动情况,偏角γ影响辐盘刃口对土壤的铅垂分力,决定挖掘辐盘的切土、碎土及翻土效果。当张角ε为常量时,偏角γ与倾角β可由偏角i表示。简化挖掘辐盘结构,工作参数如图2所示,且各个参数满足式(1)~式(3)。结合理论分析及试验[11-12],确定其工作参数β=13.3°,γ=7.8°,ε=15.25°,i=30°。
tanβ=tanεcosi
(1)
tanγ=tanεsini
(2)
sinε=(cmax-cmin)/4R
(3)

图2 辐盘式挖掘装置的工作参数Fig.2 Working parameters of the radial-disc digging device
2 辐盘式挖掘装置的有限元分析
2.1 模型建立
辐盘式挖掘装置的结构和参数决定着挖掘装置的工作稳定性和性能。借助SolidWorks三维软件建立辐盘式挖掘装置的虚拟仿真模型,利用SolidWorks与ANSYS Workbench无缝连接端口完成模型的导入模型,建立的模型大地坐标系,并在Model里进行零部件材料赋予和网格的划分[13-15]。其材料属性如表1所示。因挖掘装置是多个零件组装而成且存在较多的接触,在比较Tetrahedrons四面体单元和Hex Dominant六面体主导的网格自由划分单元质量的基础上,采用Tetrahedrons进行网格划分。通过对挖掘装置的静力学分析,可预测易发生破坏的位置,为挖掘系统的研发提供依据。

表1 材料的属性
2.2 载荷加载及约束限定
在工作中,辐盘式挖掘装置为被动滚动,主要受到机架的牵引力、土壤给予挖掘辐盘的承载力、摩擦力及粘附力等。为了便于计算,将作用于挖掘辐盘面上的力进行理论计算及简化,并合成为M=65040N·mm,Fx'=2706N,Fy'=-271N,Fz'=2294N[1]。结合辐盘式挖掘装置工作状态及实际工作条件,将载荷分别施加于挖掘辐盘或轴臂架,以减少安装误差带来的影响。对挖掘辐盘进行分析时,选择固定约束命令对挖掘辐盘安装孔6 个自由度进行约束;对圆盘轴臂架进行单独分析时,选择固定约束命令将对轴臂架的安装架6 个自由度进行约束[16-17]。加载如图3所示。

图3 加载图Fig.3 Load figure
2.3 挖掘装置的静力分析
2.3.1 挖掘圆盘的静力分析
将挖掘辐盘三维模型按照实际空间工作位置导入ANSYS Workbench,采用Tetrahedrons四面体单元进行网格划分,精度定义为100,节点数为75 660,单元数为44 654,并将挖掘辐盘与土壤的合力载入,分析辐盘的形变和等效应力情况。其网格划分结果如图4所示,变形云及等效应力云如图5所示。

图4 挖掘辐盘网格划分Fig.4 Grid partitioning of digging radial disk


图5 挖掘辐盘变形云及等效应力云Fig.5 Deformation cloud and equivalent stress cloud of digging radial disk
由图5(a)可知:辐盘的变形主要分布在挖掘辐盘的刃缘,最大形变为0.17442mm,相对于挖掘装置的尺寸较小,小于40Mn的延伸率5%,不会影响整体装置的运行轨迹及工作性能,也不足以引起机构间的干涉,可忽略不计。由图5(b)可知:挖掘辐盘的应力集中点较多且分散,最大应力点分布在辐盘的连接辐条处,且最大等效应力为51.721MPa,小于40Mn材料的屈服强度355MPa,可以满足零件的强度要求。同时,提高挖掘辐盘的强度,应在加工挖掘辐盘的过程中尽量减少铸造缺陷及应力集中。
2.3.2 轴臂架的静力分析
将轴臂架的三维模型导入ANSYS Workbench。设置材料属性,采用Tetrahedrons四面体单元进行网格划分,划分的相关性为100,节点数为254 577,单元数为145 899,并将作用于挖掘圆盘上的力等效转移到轴臂架的轴上,分析得到轴臂架的变形及等效应力云图。网格划分结果如图6所示,轴臂架的变形及等效应力云如图7所示。
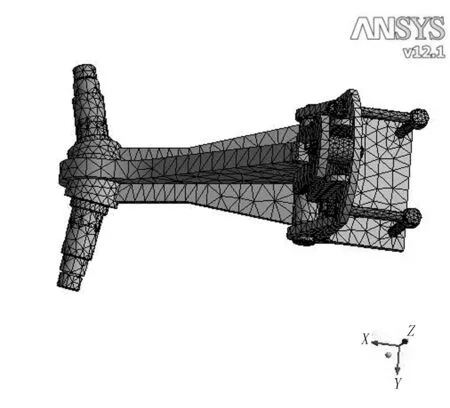
图6 轴臂架网格划分Fig.6 Grid partitioning of axis boom


图7 轴臂架变形云及等效应力云Fig.7 Deformation cloud and equivalent stress cloud of axis boom
由图7(a)可知:轴臂架的位移变形与安装架的位置有关,最大变形位置在安装辐盘的轴缘,且变形值为0.334 91mm,小于钢材料的延伸率,不影响挖掘装置的正常工作。由图7(b)可知:挖掘装置的调节块、轴臂架及安装架都存在应力集中,调节块和轴臂架上的最大等效应力分别为121.96MP和143.53MPa,且都远小于45钢屈服强度355MPa和Q235屈服极限,满足零部件的强度要求。
综合以上分析可知:辐盘式挖掘装置的结构设计合理,关键零部件的变形量与应力均在材料允许的范围内,满足工作强度要求和结构要求。
3 结论
1)辐盘式挖掘装置结构复杂,适合单株块根作物的挖掘收获,可有效减少土壤的挖掘量,避免杂草的缠绕及土壤的壅堵。辐盘式挖掘装置的辐盘凹面与土壤作用近似为平共1对三面楔的作用,辐盘凸面与土壤作用为挤压力和刮擦力。
2)挖掘装置的辐盘夹角ε、偏角i、偏角γ和倾角β决定着挖掘部件-土壤-作物之间的相互作用,倾角β影响土壤在垂直方向的运动情况,偏角γ影响辐盘刃口对土壤的铅垂分力,决定挖掘辐盘的切土、碎土、翻土效果。其工作参数如下:β=13.3°,γ=7.8°,ε=15.25°,i=30°。
3)对挖掘装置进行了静态有限元分析可知:辐盘
式挖掘装置的结构设计合理,关键零部件的变形量与应力均在材料允许的范围内,满足工作强度要求和结构要求。
[1] 王方艳.圆盘挖掘式甜菜联合收获机关键部件设计及试验研究[D].北京:中国农业大学,2014.
[2] 杨然兵,范玉滨,尚书旗.动力圆盘式花生挖掘装置的设计与效果试验[J]. 农业工程学报,2014(10):29-36.
[3] 王方艳,刘兴华,梁洁,等.摆动式花生收获机性能的试验研究[J]. 农机化研究,2009,31(7):164-168.
[4] 尚书旗,周亚龙,王晓燕,等.三种花生收获机的作业性能对比试验研究[J].农业工程学报,2008(6):150-153.
[5] 邹翔翔,廖宇兰,马庆芬,等.木薯收获机挖掘铲仿生设计及其有限元分析[J].科学技术与工程,2013,34:10122-10128.
[6] 薛忠,张衍林,张劲,等.基于ANSYS的木薯茎秆静力学仿真研究[J].农机化研究,2016,38(6):116-121.
[7] 杨小平,魏宏安,赵武云,等.4UFD―1400型马铃薯联合收获机挖掘装置的设计及有限元分析[J].中国农机化,2013(4):150-153,138.
[8] 张华,吴建民,孙伟.翼铲式马铃薯挖掘铲有限元分析与试验[J].甘肃农业大学学报,2012(4):127-129,135.
[9] 贾晶霞,杨德秋,张东兴.马铃薯收获过程中土壤与挖掘铲相互作用的有限元分析[J].农机化研究,2011,33(1):28-31.
[10] 贾晶霞,刘汉武,郝新明,等.马铃薯收获机挖掘铲有限元静力学分析[J].农业机械学报,2006(9):86-88.
[11] 王方艳,张东兴.圆盘式甜菜挖掘装置性能参数的优化[J].农业工程学报,2015(11):17-23.
[12] 王方艳,张东兴.圆盘挖掘式甜菜联合收获机设计与试验[J].农业工程学报,2013(13):7-14.
[13] 邵东伟,王俊发,姜东华,等.玉米根茬挖掘弹齿的有限元分析[J].农机化研究,2011,33(5):81-83,87.
[14] 苏建华,李磊.计算机模拟下的马铃薯机械化挖掘与试验研究[J].农机化研究,2017,39(2):167-170.
[15] 马华永,王卫兵,冯静安,等. 基于ANSYS的茬地免耕播种机机架有限元分析[J]. 农机化研究,2014,36(4):33-37.
[16] 石超,杨然兵,尚书旗.基于UG的花生收获机挖掘装置有限元静力学分析[J].农机化研究,2015,37(1):18-21.
[17] 刘选伟,金亮,王景立. 基于ANSYS Workbench的深松机机架模态分析[J]. 农机化研究,2015,37(5):29-31,35.
ID:1003-188X(2018)02-0066-EA
The Study on Structure of Radial Disk Digging Device with Finite Element Analysis
Wang Fangyan1,2
(1.College of Mechanical and Electrical Engineering, Qingdao Agricultural University, Qingdao 266109, China; 2.College of Engineering, China Agricultural University, Beijing 100083, China)
Abstract: Aiming at the shortage of single-crop root-crop harvesting equipment and the extensive structure design, the structure and working parameters of the radial disk digging device are analyzed. The model of the radial disk excavating device is established by 3D virtual prototyping technology. According to the loading situation of excavating device, the paper analysis the deformation of the excavation device and stress by virtue of ANSYS software. According to the analysis results, it is easy to find the damage site of the excavating device, which provides a theoretical basis for the optimization design and performance improvement of the subsequent excavating device.
excavation device; radial disk; finite element analysis
2016-11-20
国家自然科学基金项目(51505246);山东省高等学校科技计划项目(J15LB06);校高层次人才科研基金项目(631429)
王方艳(1979-),女,山东淄博人,副教授,博士,(E-mail) wfy_66@163.com。
S225;S220.3
A
1003-188X(2018)02-0066-04
猜你喜欢
航空发动机(2021年1期)2021-05-22
民用飞机设计与研究(2020年4期)2021-01-21
中国工程机械学报(2019年6期)2019-12-31
新课程·中学(2019年7期)2019-09-17
物理教学探讨(2018年1期)2018-02-13
制造业自动化(2017年2期)2017-03-20
专用汽车(2016年7期)2016-11-23
中国高新技术企业(2016年4期)2016-11-19
汽车零部件(2015年8期)2015-06-23
汽车科技(2015年1期)2015-02-28
