
机采棉精播机关键部件运动仿真及有限元分析
2018-06-05 15:00孙冬霞李明军宫建勋张爱民
农机化研究 2018年2期
孙冬霞,李明军,石 磊,宫建勋,张爱民
(1.滨州市农业机械化科学研究所,山东 滨州 256600;2.农业部南京农业机械化研究所,南京 210014)
机采棉精播机关键部件运动仿真及有限元分析
孙冬霞1,李明军1,石 磊2,宫建勋1,张爱民1
(1.滨州市农业机械化科学研究所,山东 滨州 256600;2.农业部南京农业机械化研究所,南京 210014)
为了满足棉花生产全程机械化的要求,项目组研发了适用于在耕整后田地上作业的2BMJ-3A型基于机采棉的智能精量播种机。为此,对2BMJ-3A型基于机采棉的智能精量播种机的结构和工作原理进行了介绍,利用三维设计软件SolidWorks和机械系统动力学分析软件ADAMS对播种机的仿形播种机构进行了运动学仿真,并利用SolidWorks中的Simulation模块对播种开沟器进行了有限元分析。结果表明:在耕整后的田地上,播种机仿形播种机构的仿形能力能够满足棉花播种的要求,播种开沟器在工作状态时不会产生屈服现象,能够满足棉花播种的使用要求。
播种机;仿形播种机构;机采棉;运动学仿真;有限元分析
0 引言
近年来,随着城镇化进程的加快,劳动力成本逐年提高,植棉成本随之上升,植棉经济效益下降,棉农植棉积极性受挫,棉花种植面积逐年减少。因此,全程机械化是棉花生产的根本出路[1],加快推进棉花生产的全程机械化成为棉花生产的必然需求;而推进棉花生产全程机械化的关键之一是适于机收的播种环节,播种环节的装备研发有助于后续管理及收获环节机械化作业的推进。
机采棉的种植模式不同于传统的棉花种植模式,机采棉对于行距的要求十分严格,需要等行距种植,行距为76cm。由于黄河三角洲棉花生产区的地理位置及气候特点,保证棉花发芽的关键在于保持土地墒情,而目前保持土地墒情的方法就是采用地膜覆盖技术[2]。棉花一膜三行种植模式是由常规棉一膜两行种植模式优化而来,符合机采棉对于行距的要求,是一种高产、轻简的种植方式。实施一膜三行栽培的棉花,通风、透光面好、出苗壮,结的棉桃铃大铃重;同时与传统种植技术相比还能增加地膜覆盖率,确保达到提高单产和丰产增收的目的。
在播种机的研发过程中,机具必须有利于抢农时,能同时完成多个工序,减少机具的进地次数,达到保墒的效果;同时,棉花对播种深度一致性的要求较高,播深必须控制在2~3cm,种床要求下实上虚[3]。
根据机采棉种植模式的特点及播种机的设计要求,项目组研发了适用于在耕整后田地上作业的2BMJ-3A型基于机采棉的智能精量播种机。
1 总体结构及工作原理
1.1 总体结构
2BMJ-3A型基于机采棉的智能精量播种机主要由机架、划行器、平行四连杆仿形机构、肥箱、种箱、施肥开沟器、播种开沟器、指夹式排种器、平地限深轮、镇压轮、展膜滚子、覆土滚筒、覆土圆盘及开沟圆盘等部件组成,一次进地可完成种床碎土、侧深施肥、种床镇压、精量播种、覆土镇压、宽幅覆膜及膜后覆土等工序,如图1所示。
整机设计为幅宽76cm×3行,一膜3行。机架包括三点悬挂装置、前后主梁、前上横梁、前下横梁、纵梁及侧板等部件;平地限深轮采用通辊镇压的方式,既起到种床镇压碎土的作用,又起到整机限深的作用;施肥装置包括肥箱、外槽轮式排肥器、电动机及施肥开沟器等部件;三组仿形播种单体各自通过U形卡安装在机架前上横梁上,保证了播深的一致性;创新性地采用了指夹式排种器,能够实现棉花单粒精播。大田生产试验表明:单粒率95%,双粒率2%~5%,籽粒无破碎现象,可增加作业速度,提高生产效率。
1.2 工作原理
2BMJ-3A型基于机采棉的智能精量播种机的工作原理如下:播种机通过三点悬挂与拖拉机悬挂点连接,通过拖拉机牵引前进进行播种作业。工作前,先将覆土滚筒抬起,再将地膜横头从膜卷上拉出,经压膜轮和覆土滚筒拉到机具后面,用土埋住地膜的横头,然后放下覆土滚筒。机组开始前进,机具前部的平地限深轮将地表的土块压碎,压平种床和膜床,以方便覆膜作业;然后施肥开沟器开沟,排肥器由电机带动,实现播种机的施肥功能;播种开沟器同时开沟,平地限深轮转动带动排种器排种,后面的镇压轮进行镇压;开沟圆盘开沟,机具行走带动地膜辊旋转,地膜逐渐脱离地膜辊平铺于地表,地膜两侧通过压膜轮压入开沟圆盘开好的沟内;紧接着,覆土圆盘将一部分土翻入地膜沟中,经膜上镇压轮压实,另一部分土翻入覆土滚筒内,覆土滚筒内的导土板将土输送到滚筒的另一端覆在地膜上,防止大风揭膜。播种机在工作过程中采用了智能监控系统,对播种、施肥进行实时监控,自动分析下种、下肥实情,出现问题能够及时报警、语音输出,避免重播(施)、漏播(施),实现精准播种、施肥,达到节种节肥目的,且报警精度不受播种机的行走速度影响;同时,实现播种面积即时测量、液晶显示,数据精确;另外,设置断电记忆功能,即作业停止电源断开后先前数据不会丢失,方便查阅汇总。
2 仿形播种机构
2.1 仿形播种机构结构
本装置是一种具有单体仿形、一级传动、智能报警及播种镇压功能的棉花单粒精播机构,主要由弧形四连杆部件、智能报警指夹式排种器部件及同心圆一级传动系统等部件组成,如图2所示。该装置利用同心圆理论,实现了一级传动。作业时,该机构调整播种深度时链条长度不变,对排种器的传动更为可靠,解决了在不平地面上作业时深浅不一致的问题,提高了播种深度一致性、穴距一致性及单粒率等各项性能指标。其结构简单,新颖,性能先进可靠。
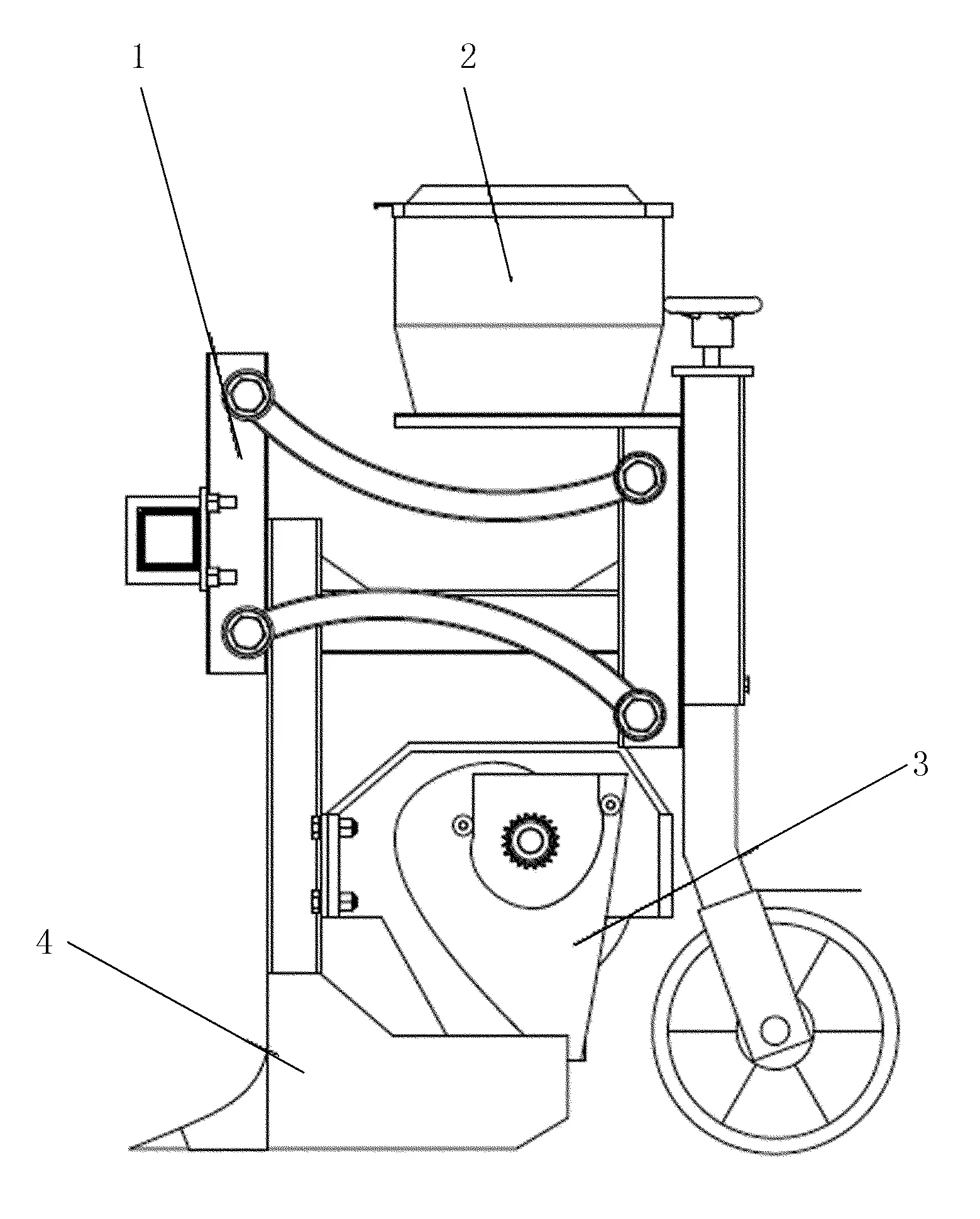
1.弧形四连杆仿形部件 2.种箱 3.指夹式排种器 4.播种开沟器图2 仿形播种机构结构简图Fig.2 Structure diagram of planing sowing mechanism
2.2 平行四连杆仿形机构工作原理
平行四连杆仿形机构主要由前支架、上拉杆、下拉杆及后支架等部件组成,如图3所示。

1.前支架 2.弧形上拉杆 3.后支架 4.弧形下拉杆 5.播种开沟器 6.U形卡图3 平行四连杆仿形机构Fig.3 Parallel four-link contoured mechanism
前支架通过U形卡与机架前上横梁连接,后支架与排种器、播种开沟器等连接。上下拉杆平行且相等,A、B两点铰接在前支架上构成四杆机构的前杆,C、D两点铰接在后支架上构成四杆机构的后杆。工作过程中,上拉杆AC杆、下拉杆BD构成连杆系统绕A、B两点转动;仿形过程中,AC、BD始终做平行运动,从而使刚性连接在后拉杆CD的播种开沟器一直做平行运动,进而保证播种开沟器在工作过程中,开出深浅一致的种沟。
3 仿形播种机构运动学仿真
仿形播种机构是播种机的重要工作机构,其仿形能力的强弱直接影响播种机的作业质量。采用机械系统动力学分析软件ADAMS对仿形播种机构进行运动学仿真,获得平地限深轮质心、播种开沟器尖点、仿形轮质心的运动轨迹及位移等数据,检验仿形播种机构设计的合理性及仿形能力的强弱,更好地了解仿形播种机构的运动过程;但由于ADAMS的优势在于运动学和动力学分析上,在建模方面ADAMS存在许多不足,很难实现一些复杂机械系统零部件的三维建模[4]。使用三维设计软件SolidWorks来建立零件模型既快捷又准确,可以通过拉伸凸台/基体、旋转凸台/基体、拉伸切除、扫描及抽壳等方法建立零件实体,同时还可以建立合适的约束条件和特征间父子关系,在建模过程中可以从不同的角度观察零件实体,以便对错误进行修改。三维设计软件SolidWorks的应用很好地解决了ADAMS在三维建模方面功能不足的问题,通过合适的接口程序将在SolidWorks中建好的三维模型导入到ADAMS中,然后进行运动学仿真分析。本文是采用三维设计软件SolidWorks和机械系统动力学分析软件ADAMS相结合的方法来实现仿形播种机构的运动学仿真。
3.1 建立几何模型
利用SolidWorks软件建立仿形播种机构的几何模型,同时对该模型进行适当的简化处理,去掉与运动学仿真不相关的部件[5]。种箱、智能报警指夹式排种器及输种管这3个部件与此次的运动学仿真关系不大,可以进行简化处理,将这3个部件去除;播种开沟器、弧形四连杆仿形机构的后支架及仿形轮的调节机构这3个部件焊接在一起,没有相对运动,可以进行简化处理,将这3个部件当成一个几何模型;弧形四连杆仿形机构的前支架用U形卡与机架相连,前支架与机架之间也没有相对运动,可以进行简化处理,将这两个部件当成一个几何模型。简化后的模型包括平地限深轮、简化后的前支架、弧形上拉杆、弧形下拉杆、简化后的后支架、仿形轮及大地共7个构件。其中,大地的几何模型比较简单,可以在仿真时在ADMAS中建模,利用SolidWorks软件建立的几何模型如图4~图9所示。

图4 平地限深轮Fig.4 Level limit wheel
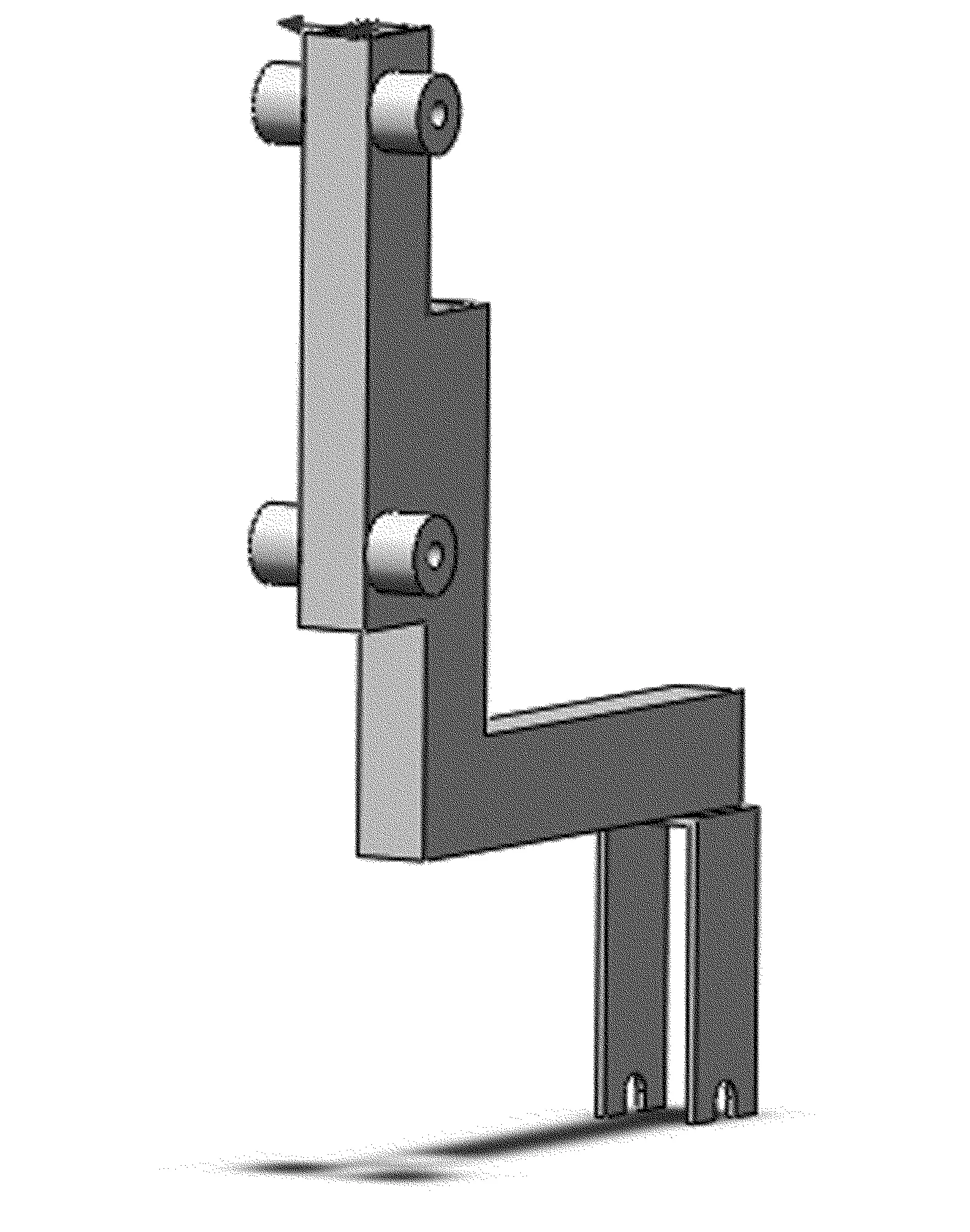
图5 简化后的前支架Fig.5 Simplified front bracke
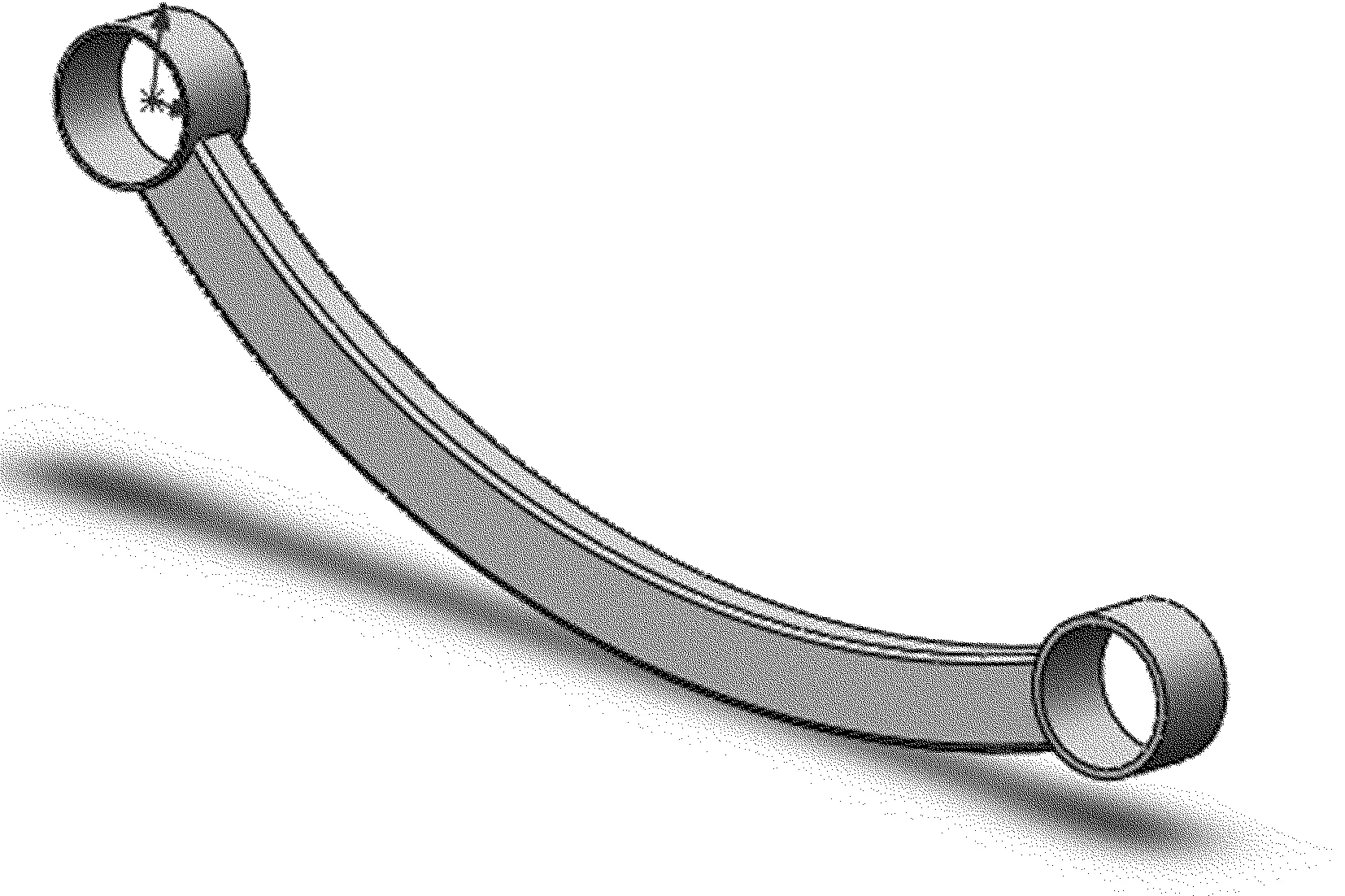
图6 弧形上拉杆Fig.6 Curved upper bar

图7 弧形下拉杆Fig.7 Curved lower rod

图8 简化后的后支架Fig.8 Simplified rear bracket

图9 仿形轮Fig.9 Copying wheel
3.2 装配几何模型
几何模型建立完成之后,利用SolidWorks软件中装配体模块进行几何模型的装配,通过装配体配合中的重合、平行、垂直、相切、同轴心、锁定、距离及角度等装配配合约束类型,可在各几何模型之间建立一定的连接关系,从而确定各几何模型在空间的具体位置关系。仿形播种机构的装配根据几何模型之间的实际装配关系和运动功能来选择相应的装配约束类型,使各几何模型能够实现其运动功能而不会产生干涉。仿形播种机构的装配体如图10所示。

图10 仿形播种机构的装配体Fig.10 Assembly of the contoured seeding mechanism
3.3 装配体导入ADAMS
使用SolidWorks软件将几何模型装配好之后,将装配体另存为ParaSolid(*.x_t)格式。需要注意的是,在数据转换的过程中,ParaSolid(*.x_t)格式文件的存储路径中不能存在中文字符,否则数据转换将会失败[6]。
在ADAMS中导入SolidWorks中已保存的ParaSolid(*.x_t)格式文件,将装配体导入ADAMS之后,对装配体中各个构件的位置根据实际情况进行调整,同时为保证后续操作的方便性,对各个构件进行重新命名。本文中,仿形播种机构各构件对应的模型名称为:平地限深轮—PART_1;简化后的前支架—PART_2;弧形上拉杆—PART_3;弧形下拉杆—PART_4;简化后的后支架—PART_5;仿形轮—PART_6。导入ADAMS后的仿形播种机构如图11所示。
根据仿形播种机构的实际情况,各构件之间的约束如表1所示。

图11 ADAMS环境下的仿形播种机构Fig.11 Contouring seeding mechanism in ADAMS environment表1 构件间的约束Table 1 Constraints between components
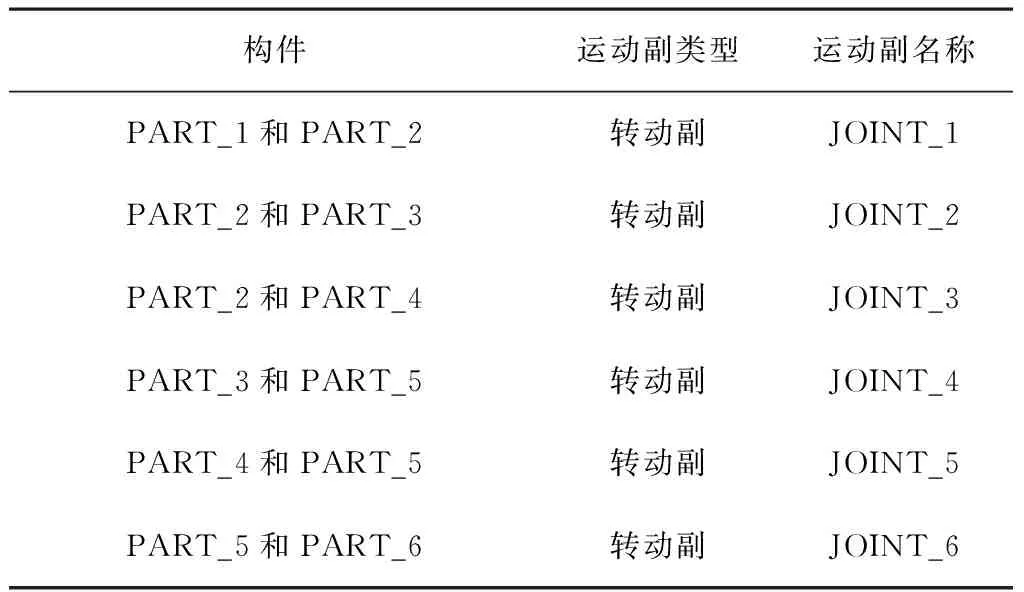
构件运动副类型运动副名称PART_1和PART_2转动副JOINT_1PART_2和PART_3转动副JOINT_2PART_2和PART_4转动副JOINT_3PART_3和PART_5转动副JOINT_4PART_4和PART_5转动副JOINT_5PART_5和PART_6转动副JOINT_6
在仿形播种构件相应的位置,将表1中构件间的约束添加上,如图12所示。

图12 ADAMS环境下的仿形播种机构运动副示意图Fig.12 Schematic diagram of the motion pair in the ADAMS environment
3.4 仿形播种机构上坡时的运动学仿真
在ADAMS中建立上坡的土壤模型,重命名为PART_7。其中,PART_7和大地之间的约束为固定副,名称为JOINT_7;PART_2和PART_7之间的约束为移动副,名称为JOINT_8,并在移动副JOINT_8上添加驱动,驱动名称为MOTION_1。为了使平地限深轮、仿形轮与地面的接触符合实际情况,将平地限深轮、仿形轮与地面的接触分别设置为曲线与曲线的碰撞力,并设置合理的碰撞参数[7]。为了便于观察仿形轮、播种开沟器及限深平地轮上坡时的运动轨迹、位移等数据信息,在仿形轮的质心位置设置一个标记点,名称为MARKER_50;在播种开沟器的尖角位置设置一个标记点,名称为MARKER_51;在平地限深轮的质心位置设置一个标记点,名称为MARKER_52。仿真模型如图13所示。

图13 仿形播种机构上坡时仿真模型Fig.13 Simulation model of up-slope of planar sowing mechanism
设定仿真时间为50s、步数为5 000步后进行仿真,仿真完成后进行后处理。图14为仿形播种机构上坡时标记点在竖直方向上的位移。其中,curve_1为平地限深轮标记点在竖直方向上的位移;curve_2为仿形轮标记点在竖直方向上的位移;curve_3为播种开沟器与仿形轮距离为395mm时,播种开沟器尖角上标记点在竖直方向上的位移;curve_4为播种开沟器与仿形轮距离为195mm时播种开沟器尖角上标记点在竖直方向上的位移。
仿真结果分析:①由curve_1可知,在0~50s期间,平地限深轮标记点在竖直方向上有位移,说明平地限深轮从0s时开始上坡。②由curve_2可知,在0~37s期间,仿形轮标记点在竖直方向上没有位移,说明仿形轮在平地上运动;在37~50s期间,仿形轮标记点在竖直方向上有位移,说明仿形轮开始上坡。③由curve_3和curve_4可知,curve_3和curve_4两条线相重合,说明播种开沟器与仿形轮之间距离的变化对播种开沟器上坡的时间点没有影响。这是因为播种开沟器是由仿形轮带动的,所以播种开沟器标记点与仿形轮标记点的运动相同,在0~37s期间播种开沟器沿平地运动,在37~50s期间播种开沟器开始上坡。
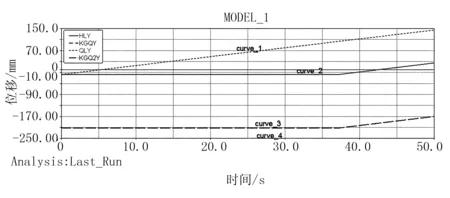
图14 仿形播种机构上坡时各标记点在竖直方向上的位移Fig.14 The displacement of the marker points in the vertical direction when the planter is uphill
图15为仿形播种机构上坡时各标记点的运动轨迹。其中,curve_5为大地表面,点a为上坡的转折点;curve_6为平地限深轮标记点的运动轨迹;curve_7为仿形轮标记点的运动轨迹;curve_8为播种开沟器与仿形轮距离为395mm时,播种开沟器尖角上标记点的运动轨迹;curve_9为播种开沟器与仿形轮距离为195mm时播种开沟器尖角上标记点的运动轨迹。

图15 仿形播种机构上坡时各标记点的运动轨迹Fig.15 The trajectory of the marking points on the uphill of the planter sowing
仿真结果分析:①由curve_6可知,平地限深轮从a点开始沿大地表面上坡。②由curve_7可知,仿形轮在a点之前在平地上运动,经过a点之后沿大地表面上坡。③由curve_8和curve_9可知,curve_8和curve_9在上坡之前的运动轨迹相重合,在上坡时仿形存在一定的滞后性,播种开沟器的播种深度与平地相比会变深;同时,在上坡时curve_9的播种深度比curve_8更接近于平地时的播种深度,仿形更精确,因此缩短播种开沟器与仿形轮之间的距离,可以提高仿形能力,提高播种深度的一致性。
由于2BMJ-3A型基于机采棉的智能精量播种机适用于在耕整后田地上进行作业,田地的坡度很小,相当于平地,所以仿形播种机构在上坡时的仿形能力满足使用要求。
3.5 仿形播种机构下坡时的运动学仿真
在ADAMS中建立下坡的土壤模型,重命名为PART_8。其中,PART_8与大地之间的约束为固定副,名称为JOINT_8;PART_2和PART_8之间的约束为移动副,名称为JOINT_9,并在移动副JOINT_9上添加驱动,驱动名称为MOTION_2。为了使平地限深轮、仿形轮与地面的接触符合实际情况,将平地限深轮、仿形轮与地面的接触分别设置为曲线与曲线的碰撞力,同时设置合理的碰撞参数。为了便于观察仿形轮、播种开沟器及限深平地轮下坡时的运动轨迹、位移等数据信息,在仿形轮的质心位置设置一个标记点,名称为MARKER_53;在播种开沟器的尖角位置设置一个标记点,名称为MARKER_54;在平地限深轮的质心位置设置一个标记点,名称为MARKER_55。仿真模型如图16所示。
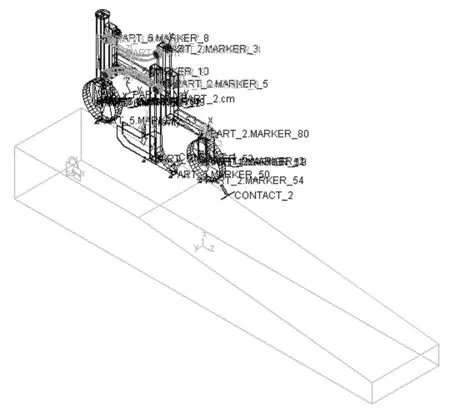
图16 仿形播种机构下坡时仿真模型Fig.16 Simulation model of downhill slanting mechanism
设定仿真时间为50s、步数为5 000步后进行仿真,仿真完成后进行后处理。图17为仿形播种机构下坡时标记点在竖直方向上的位移。其中,curve_10为平地限深轮标记点在竖直方向上的位移;curve_11为仿形轮标记点在竖直方向上的位移;curve_12为播种开沟器与仿形轮距离为395mm时,播种开沟器尖角上标记点在竖直方向上的位移;curve_13为播种开沟器与仿形轮距离为195mm时播种开沟器尖角上标记点在竖直方向上的位移。
仿真结果分析:①由curve_10可知,在0~50s期间,平地限深轮标记点在竖直方向上有位移,说明平地限深轮从0s时开始下坡。②由curve_11可知,在0~40s期间,仿形轮标记点在竖直方向上没有位移,说明仿形轮在平地上运动;在40~50s期间,仿形轮标记点在竖直方向上有位移,说明仿形轮开始下坡。③由curve_12和curve_13可知,curve_12和curve_13两条线相重合,这说明播种开沟器与仿形轮之间距离的变化对播种开沟器下坡的时间点没有影响。这是因为播种开沟器是由仿形轮带动的,所以播种开沟器标记点与仿形轮标记点的运动相同。在0~40s期间,播种开沟器沿平地运动,在40~50s期间,播种开沟器开始下坡。
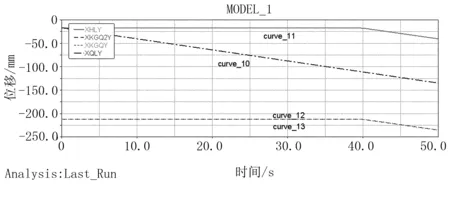
图17 仿形播种机构下坡时各标记点在竖直方向上的位移Fig.17 The displacement of the marker points in the vertical direction when the planter sowing mechanism descends the slope
图18为仿形播种机构下坡时个标记点的运动轨迹。其中,curve_14为大地表面,点b为下坡的转折点;curve_15为平地限深轮标记点的运动轨迹;curve_16为仿形轮标记点的运动轨迹;curve_17为播种开沟器与仿形轮距离为395mm时,播种开沟器尖角上标记点的运动轨迹;curve_18为播种开沟器与仿形轮距离为195mm时播种开沟器尖角上标记点的运动轨迹。

图18 仿形播种机构下坡时各标记点的运动轨迹Fig.18 The trajectory of the marking points in the downhill of the contoured seeding
仿真结果分析:①由curve_15可知,平地限深轮从b点开始沿大地表面下坡。②由curve_16可知,仿形轮在b点之前在平地上运动,经过b点之后沿大地表面下坡。③由curve_17和curve_18可知,curve_17和curve_18在下坡之前的运动轨迹相重合,在下坡时,仿形存在一定的滞后性,播种开沟器的播种深度与平地相比会变浅;在下坡时,curve_18的播种深度比curve_17更接近于平地时的播种深度,仿形更精确,因此缩短播种开沟器与仿形轮之间的距离,可以提高仿形能力,提高播种深度的一致性。
由于2BMJ-3A型基于机采棉的智能精量播种机适用于在耕整后田地进行作业,田地的坡度很小,相当于平地,所以仿形播种机构在下坡时的仿形能力满足使用要求。
4 仿形播种机构有限元分析
仿形播种机构在工作状态时,播种开沟器需入土开沟,由于田间地表的起伏不平及土壤内根茬等其他杂物的存在,对播种开沟器的强度提出了很高的要求。与人工计算相比,利用软件进行物体的有限元分析既准确又方便快捷。本文利用SolidWorks软件中的Simulation模块对播种开沟器进行有限元分析,检验播种开沟器的强度能否达到要求,在工作状态时会不会因受力过大而产生屈服变形等现象[8]。
播种开沟器在工作状态时上部受到平行四连杆仿形机构的约束,中部受到指夹式排种器的约束。播种开沟器在工作状态时受到的力主要有土壤给予播种开沟器的牵引阻力、播种开沟器自身的重力及土壤给予播种开沟器的支持力。其中,土壤给予播种开沟器的牵引阻力对于播种开沟器的力学性能影响最大;播种开沟器自身重力与土壤给予播种开沟器的支持力相平衡,对于播种开沟器的力学性能影响不大,在力学分析时可忽略不计,这里主要分析土壤阻力对于播种开沟器的力学影响。
4.1 播种开沟器的材料
设置播种开沟器的材料为Q235A,其材料特性如表2所示。

表2 Q235A的材料特性
4.2 夹具(约束)
播种开沟器的约束位置有两处,一处为播种开沟器上部与平行四连杆仿形机构的接触处,另一处为播种开沟器中部与指夹式播种器的接触处。约束情况如图19所示。

图19 播种开沟器的约束情况Fig.19 Sowing opener constraints
4.3 外部载荷
播种开沟器的牵引阻力是指土壤作用在播种开沟器上的总阻力沿前进方向的水平分力。目前,常用如下公式进行播种开沟器牵引阻力的计算,即
P=Knab
式中P—牵引阻力(N);
n—播种开沟器的个数;
a—沟深(cm);
b—沟宽(cm);
K—土壤的比阻(N/cm2)。
土壤的比阻K是指作用于土垡每单位横断面积的阻力,包括土壤性质、机具的性能及前进速度等各项因素在内,是一个综合性系数。播种开沟器在各种土壤条件下的比阻值如表3所示。
表3 各种土壤条件下的比阻值
Table 3 Specific soil resistance under various soil conditions N/cm2
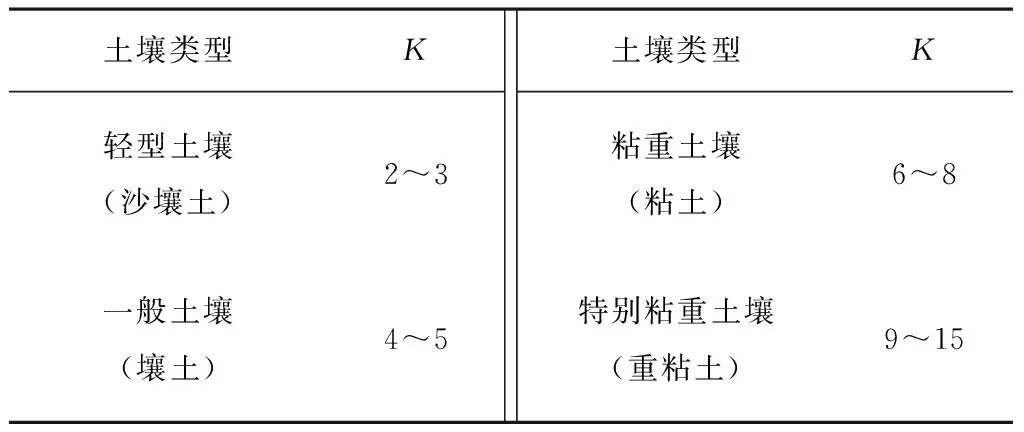
土壤类型K土壤类型K轻型土壤(沙壤土)2~3一般土壤(壤土)4~5粘重土壤(粘土)6~8特别粘重土壤(重粘土)9~15
为了保证播种开沟器在工作状态时的安全性,此次力学分析土壤的比阻K取最大值15N/cm2;因为是单个播种开沟器的力学分析,故播种开沟器的个数n为1;播种时棉花的播种深度一般为1~3cm,故沟深a取最大值3cm;根据实际测量,播种开沟器的最大宽度为3.6cm,故取沟宽b=3.6cm。将上述数值代入播种开沟器牵引阻力的计算公式中,得到播种开沟器的牵引阻力P=162N。将牵引阻力P做为外部载荷加载到播种开沟器上,载荷加载情况如图20所示。
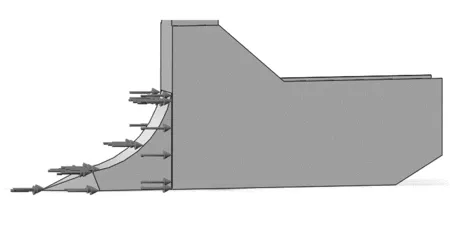
图20 播种开沟器载荷加载情况Fig.20 Load loading of seeding opener
4.4 划分网格
划分网格在Simulation模块有限元分析中十分重要,网格划分的好坏直接关系到有限元分析最后的结果。将播种开沟器进行网格划分,如图21所示。
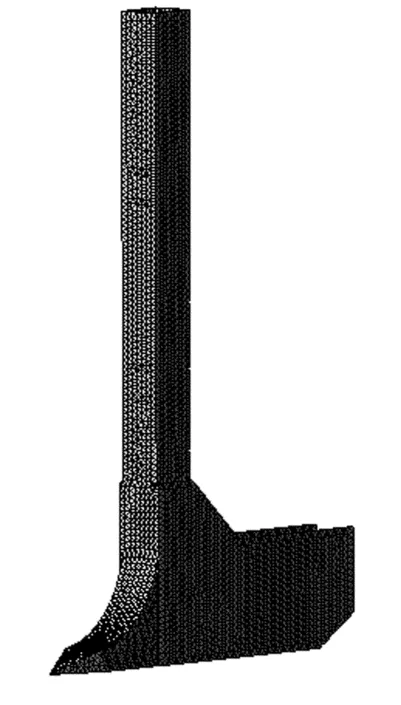
图21 播种开沟器划分网格Fig.21 Sowing opener divides the grid
4.5 结果分析
1)应力。播种开沟器应力分析结果如图22所示。
结果分析:播种开沟器的最大应力位于播种开沟器与指夹式播种器接触处的下部位置,最大应力值为60 397 344N/m2,小于材料的屈服应力2.75×108N/m2。这说明,播种开沟器在工作状态时不会产生屈服现象,无需加强。

图22 播种开沟器应力分析结果Fig.22 Stress analysis of seeding opener
2)位移。播种开沟器位移分析结果如图23所示。

图23 播种开沟器位移分析结果Fig.23 Displacement analysis of seeding opener
结果分析:播种开沟器的最大位移位于播种开沟器侧板的后下部,最大位移值为1.371×10-1mm,数值很小,可忽略不计。
3)应变。播种开沟器应变分析结果如图24所示。

图24 播种开沟器应变分析结果Fig.24 Strain analysis results of sowing opener
结果分析:播种开沟器的最大应变位于播种开沟器与指夹式排种器接触处的下部位置,最大应变值为2.087×10-4。
由结果分析可知:播种开沟器在工作状态下不会产生屈服,强度合适,满足使用条件。
5 结论
1)对2BMJ-3A型基于机采棉的智能精量播种机的结构和工作原理进行了介绍。
2)采用三维设计软件SolidWorks和机械系统动力学分析软件ADAMS相结合的方法,对2BMJ-3A型基于机采棉的智能精量播种机仿形播种机构进行了运动学仿真。通过仿真分析可知:播种机仿形播种机构存在一定的滞后性,当缩短播种开沟器与仿形轮的距离时,可以提高仿形能力,提高播种深度的一致性,为后续机具的优化提升提供了可参考的理论和设计思路。由于2BMJ-3A型基于机采棉的智能精量播种机适用于在耕整后的田地上进行作业,田地的坡度很小,相当于平地,故仿形播种机构的仿形能力满足使用要求。
3)利用三维设计软件SolidWorks中的Simulation模块对播种开沟器进行了有限元分析,结果表明:播种开沟器在工作状态下不会产生屈服变形,满足使用条件。
[1] 马俊凯.全程机械化是棉花生产的根本出路[J].中国纤检,2014(1):28-30.
[2] 宋德平,宋庆奎,成永朋,等.基于机采棉的折叠式棉花覆膜播种机设计与试验[J].中国农机化, 2015, 36(6):27-31.
[3] 张爱民,孙冬霞,王欢成,等.2BMC-4/8型棉花双行错位精量穴播机的设计与试验[J].中国农机化, 2015,36(2):1-5,12.
[4] 胡军,马旭.基于ADAMS的精密播种机的运动仿真研究[J].中国农机化, 2012(3):81-84.
[5] 滕悦江,张爱民,杨自栋,等.棉花精量免耕穴播机设计及关键部件运动仿真[J].农机化研究,2016,38 (11):177-180,185.
[6] 管西巧,赵庆志,高跃武,等.基于SolidWorks和ADAMS的牛头刨床导杆机构仿真分析[J].煤矿机械, 2014,35(10):273-275.
[7] 白晓虎,张祖立.基于ADAMS的播种机仿形机构运动仿真[J].农机化研究,2009,31(3):40-42.
[8] 杨春锋. 2BMM-3免耕粉碎灭茬精量棉花播种机设计及动力学分析[D].淄博:山东理工大学, 2014.
Motion Simulation and Mechanical Analysis of Key Components of Machine - picking Cotton
Sun Dongxia1, Li Mingjun1, Shi Lei2, Gong Jianxun1, Zhang Aimin1
(1.Binzhou Agricultural Machinery Research Institute,Binzhou 256600,China; 2. Nanjing Research Institute for Agricultural Mechanization,Ministry of Agriculture,Nanjing 210014,China)
In order to meet the full mechanization of cotton production requirements, the project team developed for the field after the tillage in the work of 2BMJ-3A-based intelligent machine precision cotton seeding machine.In this paper, the structure and working principle of 2BMJ-3A intelligent precision planter based on machine-picked cotton are introduced.The kinematics simulation of the planter seeding mechanism of the seeder was carried out by using the 3D design software SolidWorks and the mechanical system dynamic analysis software ADAMS.The simulation of the seeding opener was carried out by using the Simulation module in SolidWorks.The results showed that the profiling ability of the planer sowing mechanism of the planter could meet the requirement of cotton seeding in the field after tillage, and the sowing device could not produce yield in the working state and meet the requirement of cotton planting.
planter; planing sowing mechanism; machine picking cotton; kinematics simulation; finite element analysis
2017-02-14
山东省重点研发计划项目(2015GNC112007)
孙冬霞(1981-),女,山东寿光人,副研究员,硕士,(E-mail)bznjsdx@163.com。
石 磊(1963-),男,西安人,研究员,硕士生导师,(E-mail)shileijsnj@126.com。
S223
A
1003-188X(2018)02-0046-10
猜你喜欢
文萃报·周二版(2022年23期)2022-06-11
做人与处世(2022年2期)2022-05-26
黄河之声(2021年6期)2021-06-18
中国交通信息化(2019年9期)2019-11-16
数位时尚(幼儿教育)(2018年10期)2018-10-30
当代工人(2018年21期)2018-03-06
文学港(2018年1期)2018-01-25
中国交通信息化(2017年6期)2017-06-06
红蜻蜓·低年级(2016年6期)2016-05-14
知识窗(2015年1期)2015-05-14
