
基于UG软件的虚拟仿真实验研究与分析
2018-06-05 07:21杨武成马翔宇孙俊茹谭传洲
西安航空学院学报 2018年3期
杨武成,马翔宇,孙俊茹,谭传洲
(西安航空学院 机械工程学院,西安 710077)
0 引言
在公差实验中,长度测量实验[1]是必做实验项目。实验过程中,主要是让学生先了解各种长度测量工具[2]的原理,然后实际动手进行各种测量方法和测量步骤的训练。因仪器使用方式和读数准确度的影响,常常导致一些随机误差[3]产生和仪表的损坏。而公差实验中长度测量所用到的量具大多是游标卡尺、千分尺和高度尺[4],实验中由于操作失误[5]、操作者读数误差[6]、仪器磨损[7]、仪器测量精度[8]等原因很容易产生较大的误差,且这些常见的误差不易被消除。针对教学中公差实验的改革,国内很多学者做了相关研究。杨琪文简述了测量数据中粗大误差的概念,分析了粗大误差产生的原因和消除方法,介绍了如何根据3σ准则在测量数据中发现并剔除粗大误差[9]。关于公差实验测量中产生误差的研究文献较少,大多是对公差实验的教学方法进行改革。王颖淑等人介绍了公差CAI实验教学软件系统,其中包括实验原理、实验操作、数据处理、实验报告、自测题库五部分,并结合实际教学进一步论证了公差CAI实验教学软件在实验教学中的作用。另外指出,将CAI与传统教学相结合已成为现代教学的重要手段[10]。潘淑清针对实验课教学质量在工科机械类专业公差课程学习中的重要性,提出实验仪器的改造和实验方法的改革。通过改革,充分调动了学生学习的积极性,取得了良好的教学效果[11]。李益林结合学生特点,对实验教学实施拓展以加强实践教育为教学重点的指导思想,最大限度地开设各类内容不同的实验项目与实验室半开放形式相结合,保证学生有足够的实践操作时间[12]。丁爱玲等人研究开发了适用于公差实验教学的计算机辅助教学(CAI)软件方法,以Visual Basic6.0为主要开发工具,综合应用文字、图表、声音、动画等多媒体技术,设计了该应用软件。结论表明:该软件已满足部分实验内容的CAI教学,经过进一步的扩展和完善,可在公差实验教学中使用[13]。汤漾平等人为了满足机械制造专业形位公差测量实验教学的需求,设计并制造了一套新型的形位公差综合测量设备,该设备具有结构简单、集成度高的特点,克服了传统教学设备的局限性。在分析形位公差测量原理的基础上,详细介绍了该设备的机械结构、电气结构以及软件设计原理。该设备在该校机械制造专业教学实验应用结果表明,该设备相比于传统设备可以有效地提高机械零件典型形位公差测量实验的效率[14]。上述文献表明了公差实验的改革方式与特点,且大多对实验设备进行了改革,或者设计一种与公差实验相匹配的测量装置。针对以上情况,本文提出了基于UG软件的虚拟仿真实验研究与分析,结合UG软件的建模和运动仿真等特性,对常用的测量工具游标卡尺、圆度尺和千分尺等进行建模,对测量工具的虚拟实验进行探究。
1 虚拟仿真实验方案
采用UG软件中的运动仿真模块[15]进行长度测量实验的仿真,运动仿真模块提供了运动仿真和评估机械系统的最大位移复杂运动的工具,并且结果可以生成表格,能很清楚的知道每一时刻的各种参数值,这样就避免了因为读数而引起的误差。被测物体是被约束的装配体,避免了因为被测物体和量具摆放引起的误差。量具也是根据实测出来的尺寸进行建模的,而且在仿真过程中不会出现失灵的问题,避免了因为仪器本身而引起的误差。
2 长度测量量具的建模
用于长度测量实验的量具种类有很多,如游标卡尺、千分尺、高度尺等,而在做长度测量公差实验的时候,会出现许许多多的误差,这些误差有的是不可避免的,因此会使得测量结果出现误差。而如果采用软件进行长度测量公差实验的虚拟仿真实验,就可以很大程度的减小误差,达到公差实验精密测量的要求。
2.1 游标卡尺的建模
本次建模选取量程200mm、精度0.02mm的普通游标卡尺,能直接测量物体的长度、内径、外径。主要结构:内测量爪、外测量爪、尺身、游标尺、推把、固定螺钉、深度尺。游标卡尺的读数方法:先在主尺尺身上读出游标尺上0刻度线前和0刻度线对齐的数值,再在游标尺上找出与主尺刻度线对齐的刻度,两部分数值之和即为游标卡尺完整的读数。
对游标卡尺建模之前先对其进行测量,按照1:1的比例在UG中进行建模。尺寸经过测量实际的游标卡尺得出,对其进行约束、标注尺寸,建立的游标卡尺模型如图1所示。
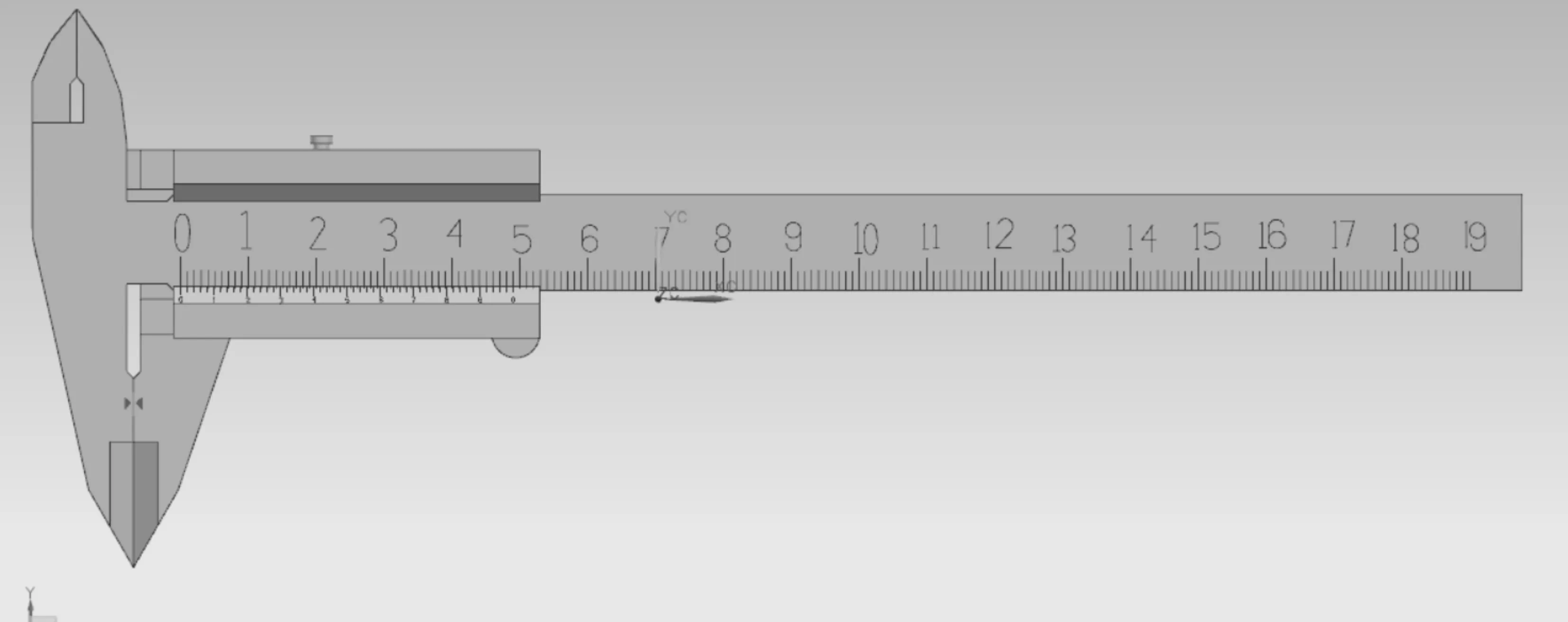
图1游标卡尺模型图
2.2 螺旋千分尺的建模
螺旋千分尺为25mm量程,千分尺的精度比游标卡尺高,可以达到毫米的千分位上。螺旋测微器是根据将螺纹放大到圆柱面上的原理制造而成的,具体原理是螺杆在螺母中转动一周,螺杆便沿着旋转轴的轴向方向前进或者后退一个螺距的距离。因此,沿轴线方向移动的微小距离,就能利用圆周上的可动刻度读取出来。螺旋测微器的精密螺纹的螺距是0.5mm,可动刻度有50个等分刻度,可动刻度旋转一周,测微螺杆可前进或后退0.5mm。因此,可动刻度盘每个小分度相当于将螺杆前进或者后退的距离等分为50等份,即0.5/50=0.01mm,由此可得可动刻度盘每一小格表示0.01mm,所以以螺旋测微器可精确到0.01mm,因为还能再估读一位,可读到毫米的千分位,故又名千分尺。
千分尺建模时主要分为两部分:第一部分包括尺架、测砧、固定套筒等在测量中不动的部分;第二部分为在测量中需要运动的部分,如测微螺杆、微分筒等。将两部分模型进行装配,使用的约束有两个测头的接触约束;螺杆和固定套筒的同心约束。保证归零时两个零刻度线对齐,总装配图如图2所示。
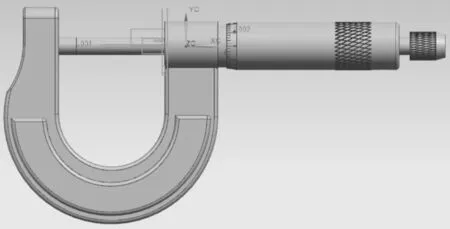
图2 螺旋千分尺总装配图
2.3 高度尺的建模
高度尺也被称为高度游标卡尺,主要结构有平板、固定尺身、测爪、游标等,它的原理和普通游标卡尺相同,主要用途是测量工件的高度,另外也经常用于物体的形位误差测量,有时也用于划线。它的使用方法:(1)归零;(2)测量、划线。
在建模之前同样也需要对高度尺进行实际测量,并且在UG里面按照1:1的比例对高度尺进行建模,模型如图3所示。

图3 高度尺总装配图
3 基于UG的虚拟仿真分析
仿真实验方案主要包括连杆选择,运动副的设置,驱动的设置以及时间与步数的设定。在设置完成之后会生成一个动画,这时需要设置干涉检查,当两个物体触发干涉后运动即刻停止。
3.1 仿真过程中运动副驱动方案的确定
运动副是两个连杆直接接触并能产生相对运动的活动连接,而在仿真过程中,需要对运动副设置驱动,使运动副能够输出运动并且作用于连杆,使连杆产生运动。
3.1.1 驱动方式的分类与确定
仿真模块提供了5种运动副的驱动。
(1)无:即表示此运动副没有驱动,它将会在其他连杆的作用下而运动;
(2)恒定:即表示此连杆按照一定的初位移、初速度或者恒定的加速度运动;
(3)简谐:表示该连杆按照一定的幅值、频率、相位角、位移进行简谐振动运动;
(4)函数:表示该连杆按照设置的函数进行运动;
(5)铰链运动驱动:表示按照转动副的形式进行驱动。
给运动副设置的驱动只表示运动副的运动状态,与物体的受力无关。依据仿真的要求,选择STEP函数驱动。
3.1.2 STEP函数的应用
STEP函数是递加递减类型的函数,它的基本格式为:
STEP(X,X0,Y0,X1,Y1)
其中,X:横坐标定义(一般为时间);
X0:时间开始的起点;
Y0:开始递加或者递减的初始数值;
X1:时间结束的终点时刻;
Y1:相对于Y0结束时位置递加或者递减的数值。
3.2 仿真方案的确定
采用UG软件提供的运动仿真模块来进行仿真实验,运动仿真模块主要用于建立运动机构模型,分析其运动规律。运动仿真模块可以进行机构的运动干涉分析,跟踪物体的运动轨迹,分析机构中零件的速度、加速度、作用力、反作用力以及力矩等。根据仿真结果可以指导修改零件的设计形状、尺寸、调整材料等。
本文以游标卡尺为例进行说明。
(1)选择连杆:选择游标卡尺的固定尺身为L001号连杆,游标部分设为L002连杆;
(2)设置运动副:选择连杆,本文选择L001号连杆,指定原点时选择绝对原点,指定矢量选择X轴;
(3)对运动副设置驱动:STEP函数即step(x,3,25,10,-25);
(4)假设仿真时长是10秒,设置解算方案如下:
①验证仿真正确性和可行性:步数10(也就是每秒10步);②用UG直接输出仿真动画:每秒步数24步;③仔细观察仿真运动过程,每秒1000步;④仔细观察仿真运动的细节运动,每秒2000~10000步。
(5)设置检查干涉元素:选择游标卡尺的测头和被测物体分别为两组对象,当两个面接触时即为发生干涉,用此来判断游标卡尺测头和被测物体是否接触。
(6)滑动模式选择步数:播放模式选择播放一次,勾选干涉和暂停事件,点击确定。
依据上述步骤,对游标卡尺进行运动仿真,仿真结果如图4所示。由此,被测物体的长度可由干涉时的步数、时间以及初始的位移来进行反算出来;同理,求得高度尺和千分尺的运动仿真,二者的干涉提示分别如图5和图6所示。若需要测量不同的零件,则仅需对更换的零件进行建模,并放置在装配环境下重新约束,即可仿真。

图4游标卡尺的干涉提示图5高度尺的干涉提示图6千分尺的干涉提示
4 仿真实验的应用
(1)应用场景:本文所述的虚拟仿真实验方法适合在公差与技术测量课堂上讲述测量方法时使用,也可供学生在公差实验时熟悉测量器具和操作方法使用。在使用前,游标卡尺、螺旋千分尺、高度尺的模型已经建立,并参考前述已经设置好仿真环境。
(2)零件测量过程:虚拟仿真实验环境中已经预先建立了一个典型的阶梯轴零件模型,并按照仿真实验方案已经设置好仿真驱动。零件的测量,是由UG软件提供的运动仿真模块进行运动仿真实现的。仿真过程中,选择干涉检查和干涉停止选项。仿真模拟中,零件的一端与量具的固定测量头是直接接触的,量具的活动测量头设置运动驱动并逐渐靠近零件的另一端,直到仿真系统报告出现“部件干涉”并停止。此时,从仿真量具上读取数值获得测量结果,读取数值的办法与实际量具读取数值的办法相同。当然,也可反向计算被测物体的长度,办法是用初始设定的位移减去发生干涉前仿真运动步数与时间的乘积即可得到被测物体的长度。如果要测量不同的零件,需要预先将待测量零件在UG软件中建立模型,并在仿真环境中进行装配、约束,仿真测量过程和预设零件相同。
(3)测量误差分析:根据前文所述,测量误差主要有操作失误误差、读数误差、仪器磨损误差、测量精度误差等。因整个虚拟仿真实验测量过程是真实测量过程的仿真模拟,采用虚拟仿真办法,无仪器磨损现象,运用仿真干涉检查可以消除人为操作失误,仪器的测量精度理论上为零,因此可以消除操作失误误差、仪器磨损误差、测量精度误差等,大大减小了误差来源。
5 结语
为了有效控制和降低测量过程中的误差,本文从公差实验中的误差来源出发,结合三维软件UG的特性,对多种测量工具进行建模、分析,利用软件来模拟公差实验的测量过程。采用UG软件中的运动仿真模块对游标卡尺的运动进行干涉分析,结合STEP函数的特点和仿真时长的设置,以达到游标卡尺的虚拟测量。
试验表明:基于UG软件的虚拟仿真实验使学生加深了对测量工具的理解,有效地降低了误差的产生,同时也为公差实验测量的教学改革积累了一些经验。本文仅对测量工具进行建模分析,并没有完全实现误差测量分析的完整性。下一步将开发相关的程序和模块,以保证虚拟实验的完整性。
[1] 刘琦.基于摄影测量学的长度测量技术研究[J].计量与测试技术,2016,43(12):58-59.
[2] 董诚.浅谈长度测试中计量器具的正确选择[J].科技经济导刊,2017(24):73.
[3] 张世功.多次测量随机误差分布的实验设计[J].大学物理实验,2010,23(3):72-74.
[4] 杨好学.互换性与技术测量[M].西安:西安电子科技大学出版社,2015:55-56.
[5] 张涛,董建荣,张欣.数控设备操作失误及预防措施[J].现代制造技术与装备,2008(2):54-55.
[6] 张延峰.轻工类产品质量检测误差精度分析[J].工业,2016(14):75,77.
[7] 蒙希.控制产品质量检验误差的措施[J].经营管理者,2015(13):69.
[8] 张宏杰.浅谈测量误差、系统误差和随机误差的理解[J].黑龙江科技信息,2011(33):50.
[9] 杨琪文.公差实验中粗大误差的发现及剔除[J].扬州职业大学学报,2003,7(4):54-56.
[10] 王颖淑,孙莉,宋玉梅.CAI在公差实验教学中的应用[J].长春大学学报,2000,10(3):77-78.
[11] 潘淑清.公差实验改革的实践[J].实验技术与管理, 2001,18(3):116-117.
[12] 李益林.公差实验教学改革研究[J].广东技术师范学院学报, 2006(6):72-74.
[13] 丁爱玲,李虹,任一峰.公差实验系统CAI软件设计[J].华北工学院学报,2000,21(2):129-131.
[14] 汤漾平,祝贺.机械制造专业形位公差综合测量实验设备的研制[J].机电工程,2012,29(1):42-45.
[15] 张桂源.辐射表检定系统中三维转台设计[D].长春:长春理工大学,2011.
猜你喜欢
农业装备与车辆工程(2022年5期)2022-10-31
汽车实用技术(2022年7期)2022-04-20
成都信息工程大学学报(2021年5期)2021-12-30
天津外国语大学学报(2021年1期)2021-03-29
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
初中生世界·九年级(2020年2期)2020-04-10
中学生数理化(高中版.高考数学)(2019年10期)2019-11-08
汽车实用技术(2018年2期)2018-05-24
汽车实用技术(2017年16期)2017-09-21
中学生数理化·高一版(2008年1期)2008-11-15
