
增程式纯电动汽车侧碰撞研究*
2018-06-04 12:02:46刘存山
机械工程与自动化 2018年3期
刘存山,冯 津
(1.东莞职业技术学院,广东 东莞 523808; 2.广州合赢教学设备有限公司,广东 广州 525100)
0 引言
增程式纯电动汽车(E-REV)具备在线充电功能,弥补了传统纯电动汽车续驶里程不足的缺点,与混合动力电动汽车相比,拥有结构简单、控制容易等优点,因此越来越受到人们的重视。
随着新能源汽车大量进入市场,E-REV汽车的安全性也越来越引起人们的重视,作为进入市场化应用的车型,E-REV应该拥有与传统燃油车同样良好的侧碰撞安全性。据统计,我国造成死亡和重伤的汽车碰撞事故中,侧碰事故约占35%,其致死率仅次于正碰撞[1],因此研究E-REV汽车的侧碰撞安全性能是非常重要的。
本文以某增程式纯电动汽车为研究对象,针对该车的结构特点,使用有限元仿真技术来分析该E-REV的侧碰撞安全性能,并与试验验证相结合,研究获得该款车型更好的侧碰撞安全性能的方法。
1 侧碰撞安全性设计原则
本文研究对象是一款改制式的增程式纯电动汽车。该款车的增程式发动机、增程器、驱动电机、驱动电机控制器和减速器均布置在发动机舱。动力电池箱布置在车辆后排座椅和后备箱之间的位置,约重230 kg,动力电池箱总能量为13 kWh。增程式纯电动汽车基本结构框图见图1。
E-REV车辆的侧碰撞安全性试验必须满足GB20071—2006《汽车侧面碰撞的乘员保护》和GB/T19751—2005《混合动力电动汽车安全要求》[2]。
图2为E-REV侧碰撞有限元模型。E-REV的侧碰撞仿真分析方法与传统汽车完全一样。在我国标准侧碰撞试验中,要求被撞车体受到的最大侧向碰撞力不超150 kN[3]。侧碰撞安全结构总的设计原则是:在侧碰发生时尽量降低左右两个B柱间(或者左右两个车门间)的相对运动速度。好的设计这个相对速度可以低于6 m/s,差的可能高于10 m/s。
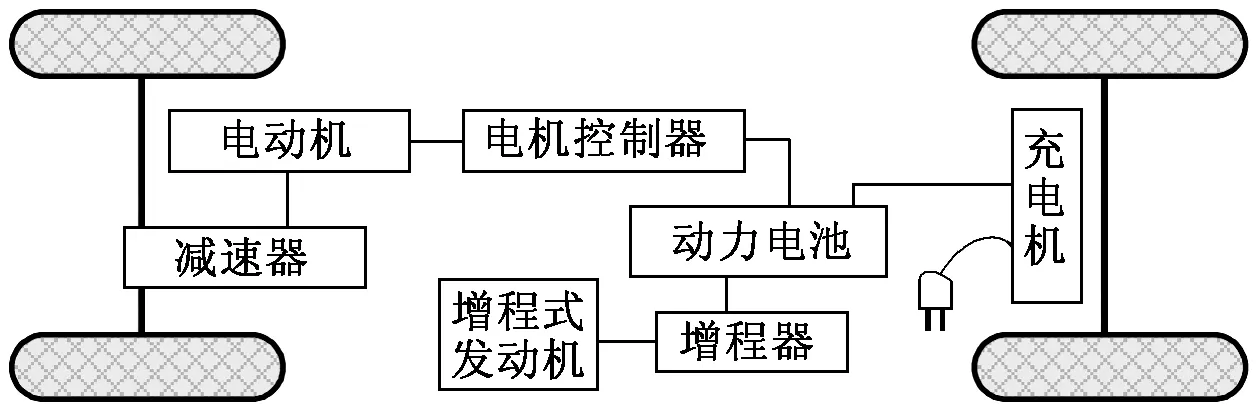
图1 增程式纯电动汽车基本结构框图
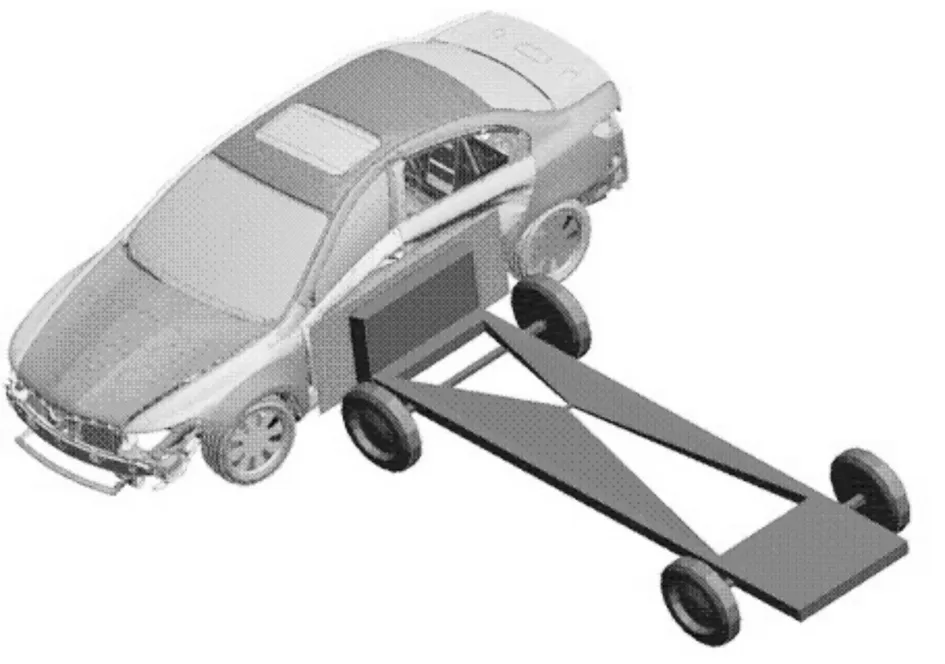
图2 E-REV侧碰撞有限元模型
2006年7月颁布执行的《汽车侧面碰撞的乘员防护》法规中对车身变形的评价方法为新车设计提出了指导性要求。侧碰撞对假人的伤害程度由假人的生存空间和传递给假人的撞击决定,而上述内容又由撞击过程中生存空间的侵入量和侵入速度决定[4]。因此,侧碰撞安全性能的优劣性可通过撞击过程中车辆的侵入量和侵入速度来评判。
与正面碰撞不同,侧碰撞需要尽快地将碰撞能量从被撞击侧传递到对侧。考虑到撞击点与乘员距离的问题,本文设计了一些横向承载条,以加快侧向碰撞能量的传递速度,同时优化该车侧围结构,避开乘员易被伤害的区域。
2 E-REV的侧碰撞仿真分析
本文按照C-NCAP可变性移动屏障侧碰撞试验的要求建模,将整车车架模型处理后导入有限元软件,使用LS-DYNA作为求解器进行分析计算。
2.1 E-REV车身结构与原型车对比
经过仿真计算得到E-REV白车身一阶弯曲模态为37.8 Hz,稍小于原型车的38.3 Hz,满足≥32 Hz的目标值要求;白车身一阶扭转模态频率为48.9 Hz,稍大于原型车48.7 Hz,满足≥35 Hz的目标值要求;E-REV白车身扭转刚度为19 821 daNm/rad,小于原型车21 815 daNm/rad,满足≥10 612 daNm/rad的目标值设计要求。
图3为弯曲加载后E-REV车身后地板最大变形处的变形量,在x=2 250 mm的位置(x轴的零点位于车身前部结构件钢梁顶端),弯曲变形量最大,约0.183 mm,原型车为0.149 mm,弯曲变形量稍有增大,仍然满足设计值要求。
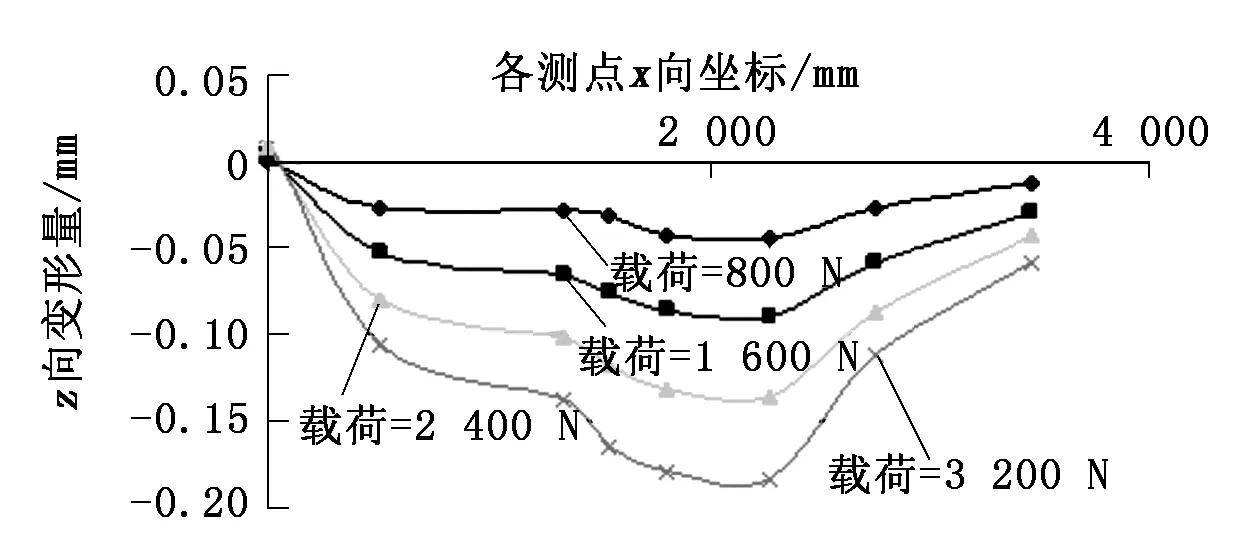
图3 E-REV车身后地板最大变形
在5g的加速度工况下,E-REV底部的高压线槽单段线槽最大应力为2.410 MPa,远小于50 MPa的屈服强度,并且在侧碰撞仿真试验中E-REV车辆底部高压线槽产生了一定程度的变形,但是线槽整体保持完整,没有损坏现象发生。
2.2 E-REV侧碰撞门槛变形分析
对E-REV侧碰撞过程中车门变形情况进行研究。根据C-NCAP可变形移动壁障侧碰撞试验的要求,将壁障的纵向中垂面与试验车辆上通过碰撞侧前排座椅R点的横断垂面对准,碰撞速度设为50 km/h,提交LS-DYNA计算,得到的结果如图4所示。图4的仿真结果显示,E-REV整车侧碰撞结果的变化趋势和原型车类似,门槛的变形不大,但B柱中部变形严重,上、下部变形较小。
综合仿真计算的结果来看,E-REV车身结构在侧碰撞试验中,因为车重的变化导致原型车已有的车身结构件应力和屈服强度发生了较大变化,使得车身主要的承重部位的碰撞变形量增大,但是增大的幅度在可以接受的范围内,可以满足国家侧碰撞法规的要求,但是如果要取得较高的性能值,还需要对E-REV整车结构做针对性的优化设计。
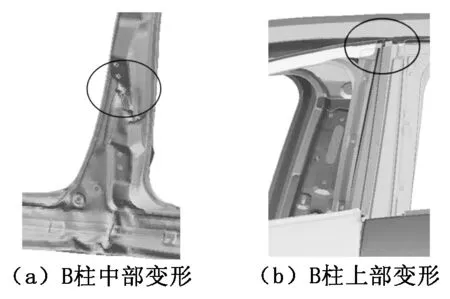
图4 E-REV侧碰撞B柱变形结果
由表1的主要损伤值可以看出,E-REV在侧碰试验中,虽然驾驶员头部没有与B柱发生直接碰撞,但是左前门内侧对应假人的肋部侵入量较大,偏向低性能值,驾驶员的头部和胸部在安全气囊没有完全展开的情况下与之发生接触,导致驾驶员侧头部HIC(Head injury criteria)损伤值偏高,无法得到好的C-NCAP分数。因此有必要对于E-REV乘员约束系统的参数进行优化,使得在侧碰撞试验中为乘员提供最优的保护。
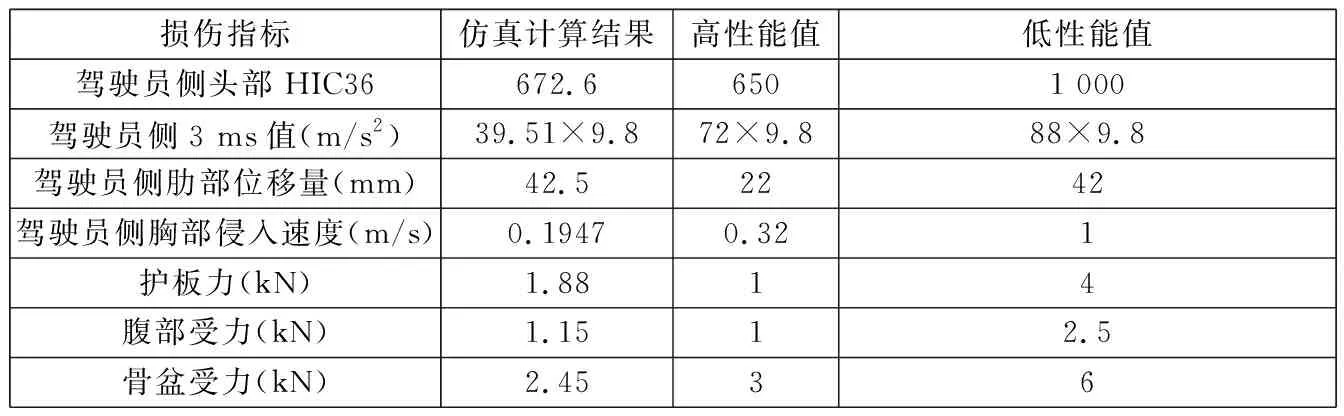
表1 E-REV侧碰撞主要损伤指标结果
常用的HIC有两种,表1中的HIC36是指时间间隔不超过36 ms的HIC。
3 E-REV侧碰撞仿真及优化结构改进
本文从E-REV车身结构优化和乘员约束系统配置参数的优化两方面分别进行。
3.1 E-REV车身结构优化
针对前面章节仿真分析得到的结果,将B柱和顶部、底部车架结合位置修改为环状结构,并改用高强度钢材,强力包覆住乘员舱的空间,强化防撞钢梁和修改左前门的防撞销结构,后地板前横梁加厚至3 mm,全面地提升了侧碰撞时的防护能力,最大程度地保证乘员的安全。优先后的E-REV车身结构如图5所示。

图5 优化后的E-REV车身结构
3.2 E-REV乘员约束系统优化
径向基函数(RBF)神经网络控制方法是一种3层前向网络,输入到输出的映射是非线性的,而隐层空间到输出空间的映射是线性的。RBF网络是局部逼近的神经网络,可以避免局部极小问题,有效地减少和控制目标函数响应的波动,进而快速地计算得到目标函数优化计算的结果,非常适合设计目标函数的优化设计计算。RBF网络逼近的性能指标函数为:

(1)
其中:E(k)为性能指标函数;y(k)为目标函数对象;ym(k)为网络输出量变量;w=[w1,w2,…,wm]T为网络权向量;h=[h1,h2,…,hm]T为高斯基函数。
RBF神经网络权值调整过程为:
W(k)=W(k-1)+ΔW(k)+α(W(k-1)-W(k-2)).
(2)
其中:W(k)为进行迭代计算的神经网络权值;α为动量因子。
由于汽车侧碰撞对人伤害最大的因素是车门的最大侵入量和最大侵入速度。我们选取5个对于E-REV原型车增加侧向刚度影响较大的零件作为RBF神经网络优化设计的对象,构建以下优化目标函数[5]:
F(x)=k1F1(di)+k2F2(vj).
(3)
其中:F1为碰撞位移影响函数;di为车门最大侵入量, 且di≤0.2 m,i=1,…,n;F2为碰撞侵入速度影响函数;vj为车门最大侵入速度,且vj≤8 m/s,j=1,…,n;k1和k2为影响调整系数;n为迭代次数,此处取n=7。
启动计算程序,开始RBF神经网络优化算法的迭代计算,经13次迭代后,得到了最优值。确定的气袋织物透气率是原型车的92%,安全带织带刚度是原型车的91%,座椅面料摩擦因数为原型车的90%,护膝板刚度为原型车的108%,安全气囊材料泄气率常数为1.2,起爆时间调整为碰撞后15 ms。
再次仿真的结果显示:HIC值由672.6降低到了355.2,胸部最大压缩量由42.5 mm降低到了23.6 mm,经过优化参数后,假人的伤害指数大幅下降,效果明显。
优化设计后的车身结构的侧碰撞仿真结果与原型车的实测结果非常相近,假人的腹部力曲线、上中下三个位置的肋骨变形量最大值波形、骨盆碰撞力最大值波形以及头部加速度波形都非常接近。图6是优化设计后的E-REV门槛在侧碰撞后的变形结果,变形位移量较小。因此,优化改进设计后的E-REV比原型车具有更好的侧碰撞安全性。
4 实验分析
通过上述分析研究,对E-REV车辆的结构和设计进行了调整和优化,经实车侧碰撞试验,得到如图7所示的试验结果。从图7中可以看出,仿真计算的加速度曲线和实车测试结果趋势一致,仿真计算加速度最大值为19.1g,实车测试值为16.3g,仿真结果略大于实车测试值,计算结果可信。

图6 E-REV侧碰撞门槛变形结果
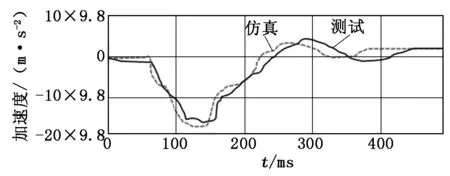
图7 E-REV侧碰撞B柱非碰撞侧加速度仿真与测试曲线
综上所述,经过优化改进后的E-REV侧碰撞性能得到了较好的提高,重新优化调整的约束系统参数能够为乘员提供最优的保护,仿真和试验的结果均表明,该款E-REV有着高性能的侧碰撞安全性。
5 结语
基于一款改制式的增程式纯电动汽车的结构和特点,建立了该车的侧碰撞有限元仿真模型,经过仿真计算,对其车身设计结构和乘员约束系统重新进行优化设计,利用RBF神经网络优化计算的结果,重新调整了设计参数,通过仿真和实车碰撞实验,验证了改进设计方案的良好效果。本文的研究内容对于改进增程式纯电动汽车侧碰撞被动安全性的研究具有一定的指导意义。
参考文献:
[1] 吴韶建,陶元芳.增程式电动汽车的概念与设计方案[J].机械工业与自动化,2010(5):209-213.
[2] 杨裕生.增程式电动车具有较强的过渡优势[N].经济日报,2010-05-25(5).
[3] 黄世霖,张金换,王晓冬.汽车碰撞与安全[M].北京.清华大学出版社,2000.
[4] 公安部交通管理局.中国统计年鉴[M].北京:中国统计出版社,2005.
[5] 中国汽车技术研究中心,清华大学汽车系,上海机动车检测中心,等.GB 20071—2006 汽车侧面碰撞的乘员保护[S].北京:中国标准出版社,2006:1-62.
猜你喜欢
中国特种设备安全(2022年6期)2022-09-20 02:54:12
汽车工程师(2021年11期)2021-12-21 06:23:10
北京第二外国语学院学报(2021年2期)2021-08-13 08:34:30
环球时报(2021-07-30)2021-07-30 05:17:11
防爆电机(2021年1期)2021-03-29 03:02:28
环球时报(2018-11-02)2018-11-02 04:25:34
汽车电器(2018年1期)2018-06-05 01:23:01
汽车文摘(2015年11期)2015-12-02 03:02:53
汽车与运动(2014年8期)2014-09-10 07:22:44
汽车电器(2014年5期)2014-02-28 12:14:11
