智能汽车LED矩阵大灯的研究
2018-06-04 03:41林纪刚朱雯房晓冰天津职业技术师范大学
数码世界 2018年5期
林纪刚 朱雯 房晓冰 天津职业技术师范大学
1.研发背景及发展现状
现代生活对于汽车的使用越来越多,汽车给我们带来便利的同时也带来了交通事故。尤其是在夜晚行车,远近光灯的使用不当造成的交通事故时有发生。由于人们的不重视和在使用中存在误区这是造成事故发生的主要原因。据统计车祸数据中夜晚车祸占60%以上,而在导致夜间车祸的非人为因素中,远光灯眩目成为夜间车祸高发因素。夜晚行车远光灯可使对面来车的司机暂时失明或出现炫目现象,这时就很容易发生交通事故。很多人不能正确的使用远光灯,为了有效制止此类事故的发生我们设计出了“智能汽车LED矩阵大灯”。
2.系统设计结构
本设计的硬件电路主要由光强传感器电路、角度传感器电路、单片机控制电路、LED矩阵大灯驱动电路等组成,系统组成框图如图所示。
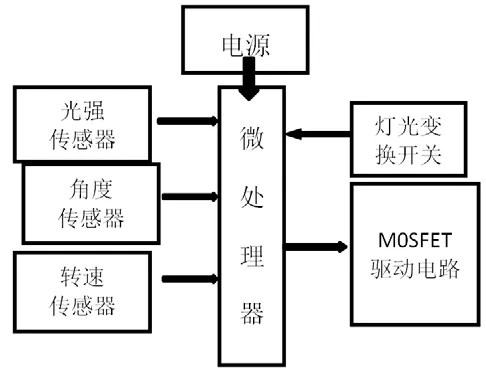
图一 系统结构图
3.硬件选择及作用
3.1 电源模块
本系统需要5V电压给单片机和各传感器模块供电,利用LM2576降压电源模块将汽车蓄电池的12V转换为5V。
3.2 主控模块
该部分采用高性能、低功耗的处理器STM32芯片为核心控制器,该芯
片为汽车嵌入式应用专门设计的ARM Cortex-M3内核单片机。单通过检测传感器输入的信息来执行相应的操作。光强度传感器采集到的信号经过电路转换后写入到单片机的A/D转换器,单片机经过分析后控制LED矩阵大灯部分点亮。
3.3 检测部分
本系统利用光强度传感器采集对面来车的远近光灯的强度,利用角度传感器采集车辆转弯角度,利用速度传感器采集车辆当前车速,并将实时采集的数据传送给单片机,由经单片机分析调理并执行相应的动作。
3.4 MOSFET驱动部分
本系统利用MOSFET驱动调速原理设计的高频栅极驱动电路。采用PC817光耦隔离单片机和负载驱动电路。根据系统调光的要求,选择内阻极低的N沟道场效应管IRF540为驱动芯片。
4 工作过程
该系统运用STM32单片机构成主控系统,通过汽车前方的光强度传感器检测对向来车的光强,当检测到对方来车且光强超过设定值时,传感器将监测到的信号传给单片机,单片机处理后输出控制信号给灯光控制模块,驱动LED矩阵大灯部分点亮。通过车速传感器检测汽车当前车速,当车速超过一定值时,自动将近光灯转为远光灯。利用角度传感器检测车辆是否转弯,当检测到转弯时自动将车辆转向角灯打开。实现灯光的智能控制,保证车辆行驶的安全。
5 市场及应用
该系统前景非常广阔,系统自动监测对向来车并自动控制灯光强度,省去了人为操作,并且避免了人为的错误使用,大大增加了夜晚行车的安全性。并且该系统还有一些辅助功能,在车辆转弯时,根据角度传感器自动控制车辆两侧的辅助照明灯,弥补了转弯时灯光的照明死角,也增加了行车安全。
[1]夏华.无线通信模块设计与物联网应用开发.1版.电子工业出版社;第1版 (2011年6月1日)
[2]杨百军、王学春等编著.轻松玩转STM32微控制器.电子工业出版社,2013
[3]李树军.机械设计.北京:科学出版社,2009【1】徐德鸿,电力电子系统建模及控制【M】.北京:机械工业出版社,2005
[4]康华光,电子技术基础【M】.第四版.北京:高等教育出版社,2009
[5]曹振华、武杰、刘广航,汽车原理与检测技术.第二版.电子工业出版社,2014
猜你喜欢
汽车维修技师(2019年4期)2020-01-15
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
电子制作(2019年11期)2019-07-04
电子制作(2019年9期)2019-05-30
汽车维修技师(2017年3期)2017-09-03
汽车与驾驶维修(维修版)(2017年4期)2017-07-18
汽车维修与保养(2016年3期)2016-09-13
汽车电器(2014年8期)2014-02-28
经营者·汽车消费报告(2013年3期)2013-05-13