基于Hyb-F组合滤波算法的向海自然保护区NDVI时间序列重构
2018-06-01 02:53姜琦刚李晓东
吉林大学学报(工学版) 2018年3期
刘 舒,姜琦刚,朱 航,李晓东,3
(1.吉林大学 地球探测科学与技术学院, 长春 130026;2.吉林大学 机械科学与工程学院, 长春 130022; 3.白城师范学院 旅游与地理科学学院, 吉林 白城137000)
0 引 言
归一化植被指数(NDVI)时间序列是反映植被与地表气候条件、人类活动间响应关系的重要工具。然而由卫星直接获取的遥感数据得到的NDVI时间序列中存在来自云、冰雪、阴影、气溶胶双向反射等多种噪声,在应用前应去除噪声,重构时间序列[1-3]。
常见NDVI序列重构方式有:基于局部数据的阈值法、最大值合成法(MVC)、Savitzky-Golay滤波法等;基于全局或半全局数据的非对称高斯拟合法、双逻辑函数拟合法[4,5]和时间序列谐波分析法[6,7]等。不同重构方法对不同区域或不同数据源的适用性不同,多位学者提出了各算法的对比结果,但各算法优劣目前并无定论[2]。
目前已有学者对一些单一类型数据重构算法进行改进[3,8],或同时利用两类滤波算法构建组合式滤波算法[2,9,10],提高NDVI时间序列重构精度和重构过程的自动化程度,但相关研究仍存在以下局限。首先,局部滤波算法较好地保留序列细部特征,但滤波结果不遵循植被生长规律,而全局滤波算法所得结果符合植被生长规律,但在局部存在过度平滑现象。其次,两类算法所得结果都容易受噪声影响,且对噪声过滤能力有限。为更形象地描述滤波效果,将噪声分为两类,一类是能被局部滤波算法识别的局部噪声,另一类为能被全局滤波算法识别的不符合植被总体生长趋势的噪声,称为全局噪声。最后,在目前的组合滤波法中,各组成部分仍相对独立,去噪过程由局部滤波法完成,而未能被局部算法识别的全局噪声则被保留,继续参与NDVI序列重构。以上局限都在一定程度上影响重构序列的精度。
本文构建了一种新型组合滤波算法Hyb-F (Hybrid filtering method based on Grubbs-introduced S-G and AG algorithms),将局部S-G滤波和全局AG拟合算法相结合,并在各自过程中引入Grubbs检测算法。该组合算法优点在于分步剔除序列局部噪声和全局噪声,构建具有精细细部特征,同时反映植被物候变化的NDVI时间序列,并以向海自然保护区为研究区,分析组合算法的性能。
1 材料与方法
1.1 研究区地理概况
向海自然保护区位于吉林省通榆县西北部,地理范围为122°05′~122°35′E,44°50′~45°19′N(图1(a),保护区范围由通榆县地图矢量化获得),是吉林省唯一列入《国际重要湿地名册》的重要湿地。保护区内多种珍稀野生动植物繁育,多样生态景观共存[11]。向海自然保护区内的地表覆被类型如图1(b)所示,主要是以蒙古黄榆、大果榆为主的灌木林地,杨树为主的乔木林地,以芦苇、香蒲为主的沼泽湿地,以羊草为主的草地,以玉米田为主的耕地,大片水域,出露的重度盐碱地和零星分布的城镇工矿建设用地[12,13]。
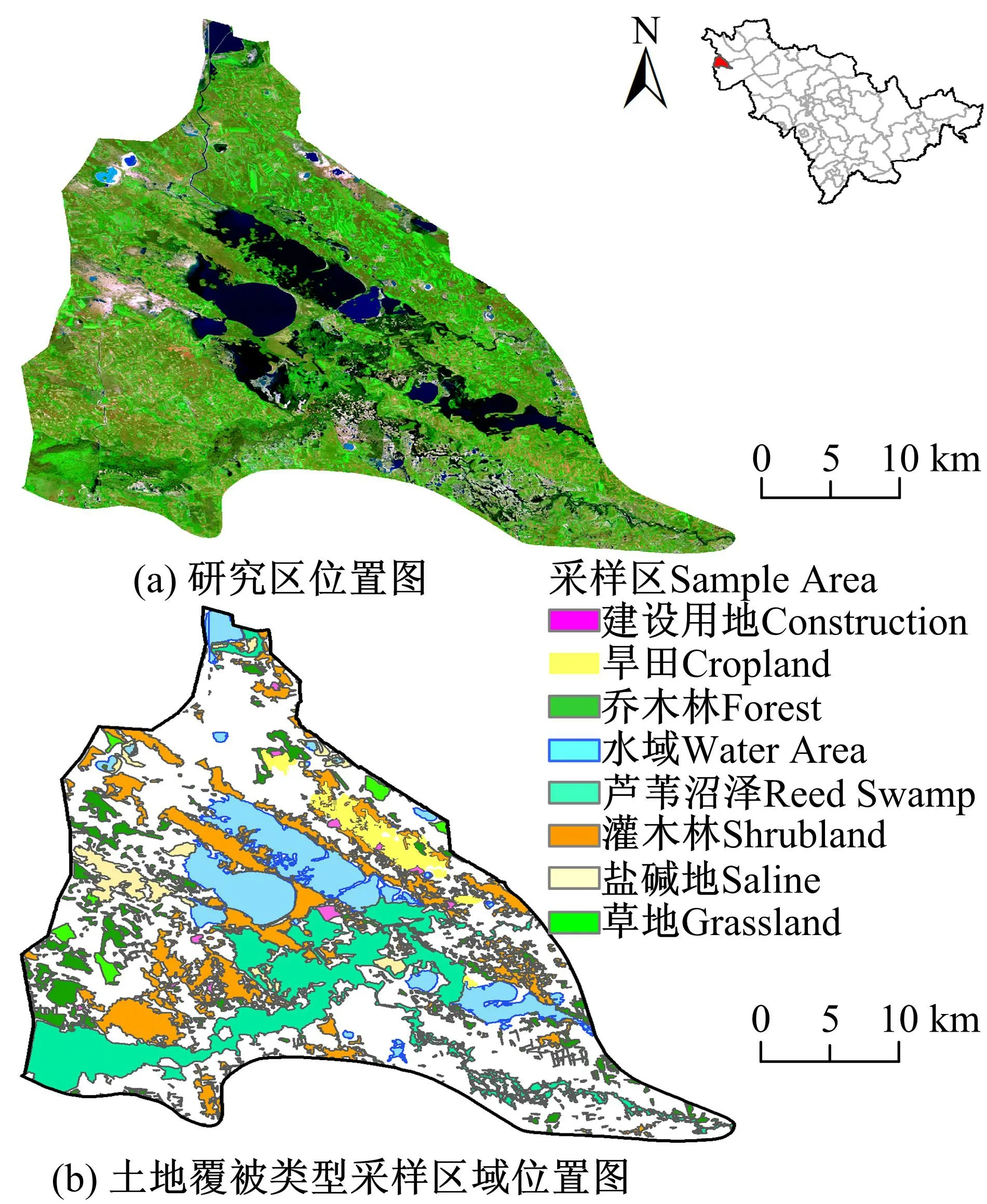
图1 向海自然保护区Fig.1 Xianghai natural reserve
1.2 数据来源
本研究选取Landsat8 陆地成像仪(OLI)获取的多光谱影像组成基础数据集。影像从USGS网站(https://glovis.usgs.gov/)下载,为L1T级数据,已经过系统辐射校正和精细几何校正,空间分辨率为30 m,时间分辨率为16天。覆盖研究区影像编号为120/029(带/行),为尽量保证影像获取年份一致,避免数据集中连续多期影像存在云雪“污染”,最终选取2015年1月至2016年12月获取的数据构成影像序列集,个别时段连续多期数据云覆盖度大,由2014年相应时段数据补充。共选取27期影像,基本信息如表1所示。
将影像在ENVI5.1中进行大气校正,将投影参数定义为WGS84椭球参数下的UTM投影(Zone51)。分别利用各期红光波段和短波红外波段计算相应影像的NDVI。其中,由2015年5月13日数据得到的NDVI不参与拟合过程,仅作为辅助数据,验证数据序列重构实验效果。将数据按年内时间顺序组合成一幅具有26个波段的NDVI时间序列影像。

表1 Landsat8 OLI数据基本特征(行列号:120/029)Table 1 Main characters of Landsat8 OLI imagery (path/row:120/029)
1.3 研究方法
1.3.1 设定指标阈值剔除噪声
直接算得的NDVI序列存在超出理论值域等与实际不符的无效点,因此,首先将移动窗口长度设为5,通过设定曲线各点取值、变化量、变化量与变化方向的关系、雪盖指数等指标的阈值,识别移动窗口中超出理论值的噪声和部分云、雪噪声。剔除窗口中噪声,并以其他值的二次多项式最小二乘拟合曲线在噪声点的取值代替原始值。
1.3.2 Grubbs异常点检验
Grubbs检验是一种常见的离群异常值检验方法,通过检验观测值残差的Grubbs统计量与某水平下的临界值之间的关系,判断异常点位置。
本研究的噪声点在剔除过程中,分别将Grubbs检验过程与S-G滤波算法和AG拟合算法相结合,判断时间序列中存在的局部异常点和全局异常点。假定进行S-G滤波前后或AG拟合过程前后时间序列的差值序列为NDVIC,Grubbs检验具体实现方法为:将NDVIC由小到大排列,并计算各点Grubbs统计量,查表获得显著性水平α下的上下临界值,找出NDVIC最大值和最小值点中Grubbs统计量较大的点,判断该点Grubbs统计量与临界值的关系。若统计量超过临界值的范围,则该点为异常点[8]。将Grubbs检测的显著性水平选为0.05,为防止对异常点的误判断,本文通过迭代过程实现异常点剔除,每次迭代仅剔除一个偏差最严重的点。在两步去噪过程中,噪声点的去噪后取值分别为以该点为中心的S-G移动窗口内基于其他点的S-G滤波曲线在该点的取值,或剔除该点后的AG拟合曲线在该点的取值。剔除一个异常点后,得到新的待降噪NDVI序列,并计算新的NDVIC序列,继续Grubbs检验,直到将所有异常点剔除。
1.3.3 Savitzky-Golay滤波算法
Savitzky-Golay滤波算法(S-G)是一种基于最小二乘原理对滑动窗口内数据进行卷积运算的数据平滑方式。对于以第j点为中心,宽度为N的滑动窗口,S-G算法基本数学表达式为:
(1)
式中:qi为原始序列第i个数据取值;pj为平滑后序列第j个数据取值;N为滑动窗口长度;m为窗口中间至一侧端点的长度,N=2m+1;Ci为第i个数据的系数。
当高质量数据在整个时间序列所占比例较高时,S-G算法能够过滤序列噪声,较细致地描述序列局部特征[14]。
在实际运算中,S-G滤波曲线由移动窗口内数据二次多项式的最小二乘拟合得出。由于时间序列中存在噪声污染的影像所占比例较大,存在局部集中情况,且无其他质量控制数据,将研究中涉及的S-G滤波过程窗口长度设为7。
本研究中两次运用S-G滤波算法,分别用于局部异常值的剔除与最终时序数据的重构。
1.3.4 非对称高斯拟合算法
非对称高斯拟合算法(Asymmetric Gussian,AG)是一种基于高斯函数拟合的非线性重构算法。该算法根据数据序列极值点所在位置将数据分段,对每段数据分别进行高斯函数拟合,并利用区间端点附近的平滑截断函数连接每段曲线,实现全局拟合。整个拟合过程分以下2步完成:
首先,将两个波峰或波谷间的数据划分为左、中、右3部分,3个峰值点位置由tL、tC和tR表示。利用局部高斯平滑函数分别拟合每一段曲线,该函数的数学表达式为:
f(t)=f(t;b1,b2,a1,a2,…,a5)=
b1+b2g(t;a1,a2,…,a5)
(2)
式中:高斯函数的具体形式为:
g(t;a1,a2,…,a5)=
(3)
参数b1和b2控制高斯函数g的基线位置和振动幅度,a1控制局部拟合区域函数峰值的位置,a2、a3、a4和a5分别决定局部拟合区域右、左部分函数的宽度和陡缓程度。
最后,利用全局方程F(t)衔接整个[tL,tR]时段各局部函数。全局函数数学表达式为:
F(t)=
(4)
式中:fL(t)、fC(t)和fR(t)分别为左、中、右3部分的局部高斯拟合函数;α(t)和β(t)为由0到1平滑过渡的截断函数[4,5]。
在本研究中,非对称高斯拟合主要与Grubbs检测算法相结合,应用于全局噪声的剔除。
Hyb-F组合滤波算法具体流程如图2所示。
1.3.5 NDVI时间序列重建效果评价方法
为评价Hyb-F组合滤波方式对NDVI时间序列的重建效果,在图1(b)所示覆被区选择样本点,提取各层NDVI取值,利用Hyb-F算法重构样本NDVI时间序列,并采用AG算法和S-G滤波算法进行对比实验。AG算法和S-G滤波算法的迭代过程对剔除低值噪声,提高拟合精度起到较大作用。因此,实际对比了Hyb-F滤波结果与原始序列(Original)、S-G直接滤波结果(S-G Direct)、S-G三次迭代滤波结果(S-G with 3 iterations)、AG直接滤波结果(AG Direct)和AG三次迭代滤波结果(AG with 3 iterations)。
本研究中,对不同方法的数据重构效果分别采用视觉直观验证和样本点重构序列统计指标定量分析两种方式进行对比。
统计指标定量分析的基础在于构建准确的参考时间序列。由于实际条件限制,观测量会有一定偏差,研究者很难通过其获取真实的NDVI时间序列。本文对比实验定量评价基于以下假定:
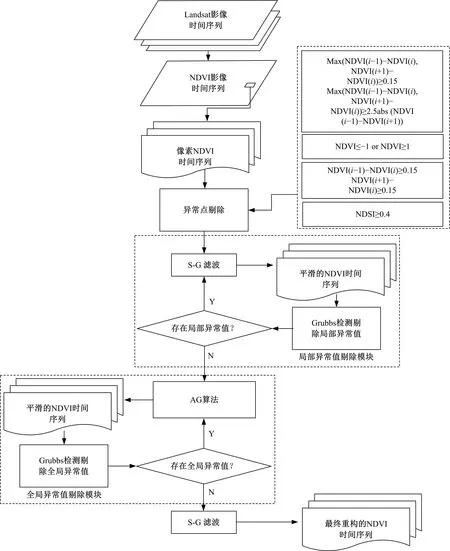
图2 时间序列滤波算法流程图Fig.2 Workflow of the hybrid filtering algorithm
若重构算法不能完全剔除原始序列中被云和雪污染的数据点,则拟合过程不能成功滤除原有高质量数据中存在的微小偏差,且拟合结果还可能降低原有高质量数据本身的精度。为此,将原序列中的高质量数据与同时刻的重构NDVI数据提取出来分别作为参考子序列和重构子序列,并计算两者间相关系数(Correlation coefficient,CC)、均方根误差(Root mean square error,RMSE)、平均绝对误差(Mean absolute error,MAE)、平均相对误差(Mean relative error,MRE)和效率系数(Coefficient of efficiency,CE),来定量评价算法重构效果。评价指标计算公式如下:
(5)
(6)
(7)
(8)
(9)

本文Hyb-F算法基于Matlab软件平台编程实现,4种对照方法的滤波结果通过TIMESAT软件获得。对照算法各点初始权重设为1,移动窗口宽度设为7,上包络线拟合强度设为2。由Landsat影像直接算得的NDVI序列存在超出理论值域等与实际不符的无效点,因此,采用对照方法滤波前将移动窗口长度设为5,通过设定曲线各点取值、变化量、变化量与变化方向的关系、雪盖指数等指标的阈值,识别并剔除移动窗口中超出理论值的噪声和部分云、雪噪声,并以保留下来数据的二次多项式拟合曲线在噪声点的取值代替原始值。
2 结果与讨论
2.1 样本拟合结果直观视觉比较
由于各覆被类型的植被生长状况有所差异,将各覆被类型分为“有植被生长覆被类型”与“非植被生长覆被类型”两大类进行分析,从各覆被类型样本中分别选取一个拟合结果接近的样本和一个拟合结果差异较大样本进行直观比较(见图3和图4)。
图3(a)和(b)分别为芦苇沼泽样本各算法拟合结果接近和差异较大的曲线,(c)和(d)分别为旱田样本各算法拟合结果接近和差异较大的曲线,(e)和(f)分别为乔木林样本各算法拟合结果接近和差异较大的曲线,(g)和(h)分别为灌木林样本各算法拟合结果接近和差异较大的曲线,(i)和(j)分别为草地样本各算法拟合结果接近和差异较大的曲线。由图3可知,有植被生长覆被类型,植被均呈现一年一峰的生长规律,峰值均出现在8月。草地样本的峰值较低,介于0.4~0.5之间,灌木林地样本峰值稍高,介于0.5~0.6之间,芦苇沼泽、乔木林地和旱田样本峰值最高,达到0.7以上。Hyb-F、S-G和AG算法都能平滑NDVI曲线。Hyb-F算法整体上与AG算法和S-G算法的三次迭代运算结果更接近。该算法的异常值判断方案分3步剔除噪声,植被NDVI曲线峰值保存较好,峰值处噪声对最终拟合结果影响较小;剔除异常值后的时间序列各点取值符合植被生长变化规律,基于此算法得到的重构结果能体现植被的年内整体生长变化特征,即全局特征。Hyb-F滤波法最终滤波过程由二次S-G滤波完成,能较好地保留NDVI曲线的细部变化特征。
无迭代过程直接得到的S-G和AG滤波结果受噪声影响大,尤其是当原始曲线峰值附近存在低值噪声污染时,拟合曲线的峰值偏低,存在明显峰值损失。两种算法的迭代方式增加了拟合结果与原始序列的比较过程,通过调整曲线低值位置的拟合权重来调整重构序列取值。迭代运算能够优化含有低值噪声序列的拟合结果,但对高值噪声不敏感,迭代结果趋近时间序列的上包络线。此外,重设权重时虽识别了低值噪声,但低值仍然参与运算过程,影响拟合曲线质量。
图4(a)和(b)分别为盐碱地样本各算法拟合结果较为接近和差异较大的曲线,(c)和(d)分别为城镇工矿建设用地样本各算法拟合结果较为接近和差异较大的曲线,(e)和(f)分别水域样本各算法拟合结果较为接近和差异较大的曲线。由图4可知,研究区内重度盐碱地、工矿建设用地鲜有植被生长,年内NDVI取值接近于0,且无明显变化趋势。重构后的水域样本NDVI时间序列取值普遍为负值,整体呈现先降低再升高趋势。冬季曲线取值偏高,可能东北地区冬季水体表面冻结引起的水表反射率变化导致。夏季水体NDVI取值出现低矮波峰,可能由水面植被生长造成[17]。对于重度盐碱地和城镇工矿建设用地的理想拟合结果应为接近于0的恒定值,然而在中等分辨率影像上,城镇内部绿化区域与建筑物构成混合像元,盐碱地表层生长的少量植被与出露盐碱地构成混合像元,使城镇工矿用地和盐碱地在影像分辨率尺度上很难达到绝对纯净,NDVI曲线受植被影响,但总体应保持原有趋势。对于非植被生长覆被类型(图4),Hyb-F组合滤波法重构的时间序列,最大值降低,最小值提高,在一定程度上削弱了曲线体现出的植被生长规律,达到平滑曲线的效果,但仍存在细小波动。AG和S-G三次迭代滤波算法所得结果仍然趋近曲线整体上包络线,当高值突变噪声存在时,其对盐碱地(图4(a)(b))、城镇工矿用地(图4(c)(d))的部分样本的滤波结果表现出植被生长的变化规律,与实际情况不符。对于此类型的NDVI曲线拟合,Hyb-F和AG的直接拟合结果更接近真实情况,AG算法直接拟合效果更佳。

图3 植被覆盖区域不同重构算法视觉效果对比.Fig.3 Visual comparison of fitted curve of different methods for each land cover type with vegetation

图4 非植被覆盖区域不同重构算法视觉效果对比Fig.4 Visual comparison of fitted curve of different methods for each land cover type without vegetation
2.2 样本点重构序列指标定量分析
采用不同滤波算法重构各类地表覆被时间序列,重构结果的精度评价指标如表2所示。表2中前5类覆被类型为有植被生长的覆被类型,后类为非植被生长覆被类型。AG1和SG1分别表示AG、S-G算法无迭代的直接拟合方式,AG3和SG3分别表示两种算法三次迭代拟合方式,Hyb-F表示本文提出组合滤波算法。表中粗体数字表示各地类拟合结果对应统计指标的最佳取值,带下划线的数据表示各地类拟合结果对应统计指标的最差取值。
Hyb-F算法对灌木林地和草地的重构结果子序列与原子序列的相关系数分别为0.9215和0.9158,与其他种拟合结果相比,RMSE、MAE和MRE的取值最小。Hyb-F算法对灌木林地和草地样本的重构效果最好。AG算法的直接拟合结果对这两种覆被类型的拟合结果精度较差。Hyb-F算法对旱田样本的重构结果与其他算法相比相关系数较小,但也达到0.9108,说明Hyb-F重构算法也能构建高质量的旱田NDVI时间序列。在重构旱田数据时,AG算法的效果最好。Hyb-F算法对芦苇沼泽的重构效果最差,与原子序列的相关系数为0.8036,在几种算法中相关性最低,RMSE为0.1732,MRE为0.4597,在几种算法中重构误差最大。然而,芦苇沼泽的NDVI取值除受植被类型的影响外,还受到水文条件的制约,相比于旱地,NDVI曲线变化规律较复杂,这可能是造成拟合结果偏差较大的原因。Hyb-F算法对乔木林地的重构结果与原子序列的相关系数较低,仅高于SG3方式的重构结果,然而,重构子序列和参考子序列间的偏差较小,推断Hyb-F算法对乔木林地的重构子序列能够还原原序列中高质量数据,较低的相关性可能由两子序列同时间点数据差值的方向变化导致。以上结果表明Hyb-F算法能有效模拟植被覆盖区域的NDVI曲线变化趋势。
对于鲜有植被覆盖的重度盐碱地和城镇工矿建设用地样本,组合滤波法的指标值优于其他种方式,而对于水域样本的模拟,Hyb-F 组合滤波法所得结果精度最差。非植被生长的覆被类型,时序曲线的理想值趋于常数,不能仅通过相关系数、绝对误差和相对误差判断滤波效果,在分析该类地物时序曲线重构效果时,还需引入完整时序曲线最大值、最小值、均值指标,各指标取值如表3所示。其中Original为滤波前的原始时间序列。
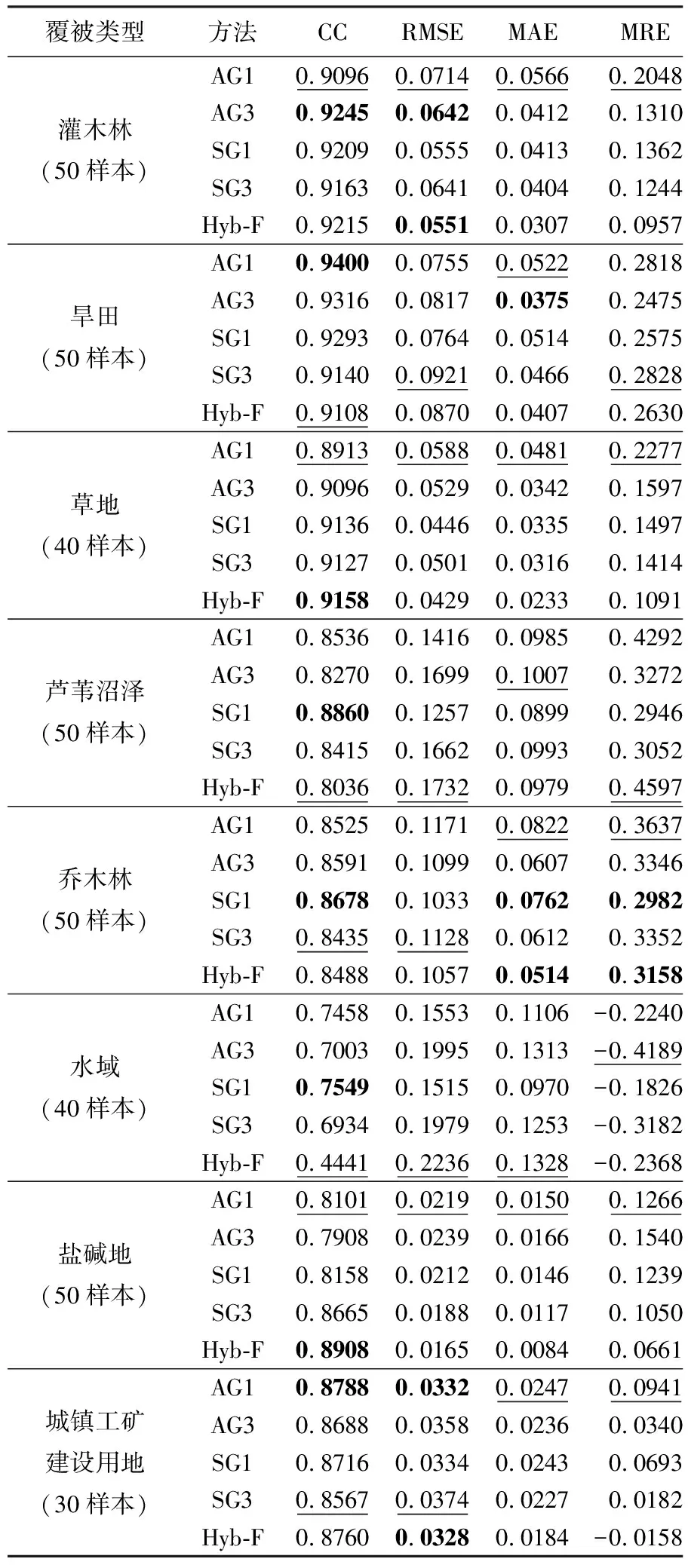
表2 各覆被类型不同滤波算法结果统计指标对比Table 2 Statistic evaluation of different methods for each land cover type
由表3可知,所有的滤波结果都能在一定程度上降低序列最大值,提高序列最小值,使NDVI时序数据取值跨度减小,更趋近于常数,达到平滑曲线效果。Hyb-F滤波算法对水域的平滑效果最好,对重度盐碱地和工矿用地的平滑效果仅次于AG1方法。采用Hyb-F算法能有效重构非植被生长的覆被类型的时序数据。

表3 非植被生长覆被类型滤波算法结果额外统计指标对比Table 3 Additional statistic evaluation of different methods for each land cover type without vegetation
2.3 区域应用
2.3.1 区域应用视觉效果分析
遥感影像云噪声能通过人眼直接识别,图5为向海自然保护区云污染数据采用Hyb-F滤波前后对比图,图5(a)和(b)为4月29日厚云污染数据滤波前后对比图, (c)和(d)为9月19日絮状云污染数据滤波前后对比图。从图5可见,以植被指数时间序列影像为基础,采用Hyb-F算法重构时序数据,能识别云噪声点,并拟合噪声点处数据取值,滤除影像云层。由图5 (c)和(d)可知,在无云遮挡区域,组合滤波算法能有效保持原有数据的取值水平。
2.3.2 区域应用指标定量分析
为定量分析Hyb-F算法区域拟合结果,将一景噪声污染影像的重构结果与获取条件接近的一景高质量参考影像进行对比,计算定量评价统计指标。由于植被生长速率有限,对同一样点,一般假定获取时间间隔在5天内的NDVI值近似相等。Landsat卫星传感器相对稳定,且研究区为自然保护区,较少人为干扰,相邻年份同时期土地利用类型相对固定,气候条件稳定。选取2015年5月13日与2016年5月15日拍摄影像评价算法区域应用效果,影像特征见表1。由影像拍摄时间的历史气象数据得知,两景影像都是晴天获取,且获取影像时段的气温接近,符合假设条件,可近似认为两景影像获取的NDVI取值相等。由于水体具有流动性,NDVI取值不确定度大,变化迅速,因此在比较区域应用指标时,仅计算非水体部分的拟合结果统计指标(见表4)。
将组合算法在整个向海自然保护区应用,滤波结果与临近参考影像间的相关系数为0.8350,数据重构效率系数为0.5904,组合滤波算法能够有效模拟整个区域土地覆被类型的NDVI实际情况。

图5 研究区云污染数据滤波前后对比.Fig.5 Comparison of imagery before and after the regional application of the hybrid filtering algorithm

表4 Hyb-F算法区域应用效果统计指标Table 4 Statistic evaluation for the regional application of the hybrid filtering algorithm
3 结 论
利用Landsat8影像构建NDVI时间序列,并采用Hyb-F组合滤波方案剔除序列噪声,重构NDVI时间序列曲线。与常用的S-G局部滤波算法与AG半全局拟合算法相比,Hyb-F算法有以下特点:
(1)能更有效地全面识别序列全局和局部异常点,提高曲线拟合精度,减少低值异常点引起的峰值损失。
(2)Hyb-F算法兼顾时间序列曲线的局部特征和全局变化趋势,对于有植被生长的覆被类型,滤波结果与原始数据相关性较大,样本的重构结果子序列与纯净数据子序列间的相关度达0.8以上,对草地和灌木林地样本的重构精度最高。由于水文因素影响,芦苇沼泽NDVI的变化较为复杂,组合式滤波法的拟合结果精度较差。
(3)对于非植被生长覆被类型,该算法能有效滤除序列的波动信息,平滑时序曲线。
本研究主要的数据源为Landsat8 OLI多光谱影像,在今后的研究中可基于其他类型数据继续实验,收集研究区植被物候观测数据,将物候信息提取能力引入到算法精度评价方案中,并尽量获取野外实测的NDVI值,得到更精确、更全的面验证结果。
参考文献:
[1] Zhou J, Jia L, Menenti M, et al. On the performance of remote sensing time series reconstruction methods—A spatial comparison[J]. Remote Sensing of Environment, 2016, 187:367-384.
[2] Geng L, Ma M, Wang X, et al. Comparison of eight techniques for reconstructing multi-satellite sensor time-series NDVI data sets in the heihe river basin, China[J]. Remote Sensing, 2014, 6(3):2024-2049.
[3] 刘亚南, 肖飞, 杜耘. Logistic函数方法拟合多时序NDVI数据的改进研究[J]. 遥感技术与应用, 2015, 30(4):737-743.
Liu Ya-nan, Xiao Fei, Du Yun. Improved logistic model for fitting time-series NDVI data[J]. Remote Sensing Technology and Application, 2015, 30(4):737-743.
[4] Jonsson P, Eklundh L. Seasonality extraction by function fitting to time-series of satellite sensor data[J]. IEEE Transactions on Geoscience & Remote Sensing, 2002, 40(8):1824-1832.
[5] Jönsson P, Eklundh L, Timest.A program for analyzing time-series of satellite sensor data[J]. Computers & Geosciences, 2004, 30(8):833-845.
[6] Zhou J, Jia L, Menenti M. Reconstruction of global MODIS NDVI time series: Performance of harmonic analysis of time series (HANTS)[J]. Remote Sensing of Environment, 2015, 163:217-228.
[8] 张霞, 李儒, 岳跃民, 等. 谐波改进的植被指数时间序列重建算法[J]. 遥感学报, 2010, 14(3): 437-447.
Zhang Xia, Li Ru, Yue Yue-min, et al. Improved algorithm for reconstructing vegetation index image time series based on fourier harmonic analysis[J].Journal of Remote Sensing, 2010, 14(3):437-447.
[9] 刘珺, 田庆久, 黄彦, 等. 黄淮海夏玉米物候期遥感监测研究[J]. 遥感信息, 2013, 28(3):85-90.
Liu Jun, Tian Qing-jiu, Huang Yan, et al. Monitoring phenology of summer maize in huang-huai-hai using remote sensing technology[J]. Remote Sensing Information, 2013, 28(3):85-90.
[10] Liang S, Ma W, Sui X, et, al. Extracting the spatiotemporal pattern of cropping systems from NDVI time series using a combination of the spline and HANTS algorithms: a case study for shandong province[J].Canadian Journal of Remote Sensing, 2017,43(1):1-15.
[11] 卞建民, 林年丰, 汤洁. 吉林西部向海湿地环境退化及驱动机制研究[J]. 吉林大学学报:地学版, 2004, 34(3):441-444,458.
Bian Jian-min, Lin Nian-feng, Tang Jie. The environment degradation and its driving mechanism of Xianghai wetland in the west of Jilin province[J]. Journal of Jilin University (Earth Science Edition), 2004, 34(3):441-444, 458.
[12] 李荣平, 周广胜, 郭春明, 等. 1981-2005年中国东北榆树物候变化特征及模拟研究[J]. 气象与环境学报, 2008, 24(5):20-24.
Li Rong-ping, Zhou Guang-sheng, Guo Chun-ming, et al. Phenology characteristics of ulmus pumila and its simulation from 1981 to 2005 in Northeast China[J]. Journal of Meteorology and Environment, 2008, 24(5):20-24.
[13] 唐蕴, 王浩, 严登华. 向海自然保护区湿地生态需水研究[J]. 资源科学, 2005, 27(5):101-106.
Tang Yun, Wang Hao, Yan Deng-hua. Wetland ecological water demand in Xianghai natural reserve[J]. Resources Science, 2005, 27(5):101-106.
[14] 周增光, 唐娉. 基于质量权重的Savitzky-Golay时间序列滤波方法[J]. 遥感技术与应用, 2013, 28(2):232-239.
Zhou Zeng-guang, Tang Pin. VI-quality-based savitzky-golay method for filtering time series data[J]. Remote Sensing Technology and Application, 2013, 28(2):232-239.
[15] Wu M, Zhang X, Huang W, et al. Reconstruction of daily 30 m data from HJ CCD, GF-1 WFV, landsat, and MODIS data for crop monitoring[J]. Remote Sensing, 2015, 7(12):16293-16314.
[16] Li X, Shen H, Li H, et al. Patch matching-based multitemporal group sparse representation for the missing information reconstruction of remote-sensing images[J]. IEEE Journal of Selected Topics in Applied Earth Observations & Remote Sensing, 2016, 9(8):3629-3641.
[17] 李天祺, 朱秀芳, 潘耀忠, 等.环境星NDVI时间序列重构方法研究[J]. 遥感信息, 2015(1):58-65.
Li Tian-qi, Zhu Xiu-fang, Pan Yao-zhong, et al. NDVI time-series reconstruction methods of China's HJ satellite imagery[J]. Remote Sensing Information, 2015(1): 58-65.
猜你喜欢
河北地质(2022年2期)2022-08-22
哈尔滨工业大学学报(2022年5期)2022-04-19
摄影世界(2022年1期)2022-01-21
科学大众(2020年17期)2020-10-27
现代园艺(2017年23期)2018-01-18
商周刊(2017年6期)2017-08-22
中国公路(2017年11期)2017-07-31
火控雷达技术(2016年3期)2016-02-06
海军航空大学学报(2015年1期)2015-11-11
空间控制技术与应用(2015年3期)2015-06-05