虚拟现实技术对机械臂的操控性研究
2018-05-31 02:49王亚平姚春梅张永
商情 2018年14期
关键词:机械臂
王亚平 姚春梅 张永
【摘要】本文以unity3D制作虚拟场景,使用Solidworks制作工程图,再使用3DS建立模型以Simulink中的模拟信号对机械臂虚拟模型的仿真控制,利用Virtual Reality Toolbox中的VR sink模块导人之前编辑好的机械臂虚拟模型,来生成控制信号的接入端,使控制信号与机械臂虚拟模型之间建立关联。
【关键词】虚拟设备 机械臂 仿真建模 VR场景
一、引言
虚拟现实技术(Virtual Real ity Technology,简称VR)是近些年来将三维建模技术、图像处理技术、仿真控制技术和计算机网络技术等融合为一体而形成的高新技术。虚拟现实技术中的“虚拟”是指利用计算机模拟产生一个三维的虚拟场景,这个虚拟场景可以是根据世界上的任何事物或环境构造的,也可以是由制作者凭空想象出来的,然后人们可通过传感辅助设备与所构造的虚拟场景中的事物进行交互,使人们对虚拟场景产生身临其境的感觉。
二、实现原理
操作人员戴有VR头盔显示器,利用操控手柄对虚拟现实环境下的虚拟机械臂模型进行操控。机械臂通过虚拟机械臂模型获取相应的动作。利用MATLAB仿真,数学建模和计算机辅助设计等技术对虚拟环境模型和虚拟操作对象模型进行建立。机械臂顶端可分为单指和双指状态,操作人员可以通过佩戴VR设备对虚拟机械臂进行实时性操作,还可以对一项操作进行录制后,机械臂可自动模拟该项动作。单指状态下口j‘以在键盘上操作,双指状态可以模拟提取东西动作。
三、实现方法
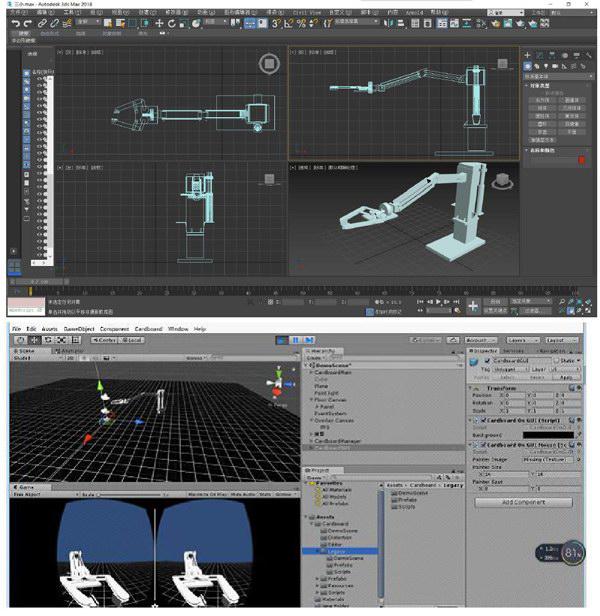
(一)VR场景搭建
用Cardboard的SDK开做成VR模式,集成Cardboard的SDK,软件就变成VR模式了。可以实时采集头部的转动,用头部的转动去控制机械臂上方的两个舵机,这样可以实现手机的转动就头部转动同步了。在Unity下,在头部(Main Camera)前面绑定一个半透明的Plane组件,接收到的回传图像就是显示在这。做成半透明,是为了不遮挡观察3D环境(如手臂模型和机械臂模型)。
(二)机械臂模型建立
草图由草图单元、几何约束和草图尺寸组成,对以上三部分的组合定义就完成了一个草图的绘制。为提高草图的设计效率,我们的设计步骤通常按以下顺序进行:绘制草图轮廓一定义草图单元问的几何约束关系一添加尺寸。在草图绘制过程中要充分使用约束关系,减少不必要的草图尺寸,从而使草图的构思更加清晰。Solidworks主要用于完成零件设计、装配体设计和自动生成工程图。根据三维特征元素的建模和面向特征元素的数据修改来完成进一步完善模型。
(三)虚拟操控
用集成蓝牙BLE。通过蓝牙连接手臂动捕设备,实现虚拟手臂和现实手臂的同步。手柄上的按键可以调用一些简单功能。使用手臂动作捕捉的硬件,来获取想要捕捉的动作。把手机变成一个Http服务器。需要提供两个访问端口(Port):一个端口接收控制指令,并回复客户端;另一个端口在收到客户端请求时回传一帧摄像头图像搭建手机和单片机之间的USB通信。Intel Edison的板子实现通过局域网接收机械臂的控制指令。
四、小结
手部动作捕捉的设备对技术要求很高,涉及到的动作细节非常多,一个动作所产生的数据量很大,对系统的处理能力就有很强的硬性需求。虚拟场景中控制机械臂运作,机械臂使用3D打印技術制作,模型导入VR场景中,对模型进行仿真。由于人员不足,还有部分设备无法获取导致该项目没有完成成品。
参考文献:
[1]张勇.基于Simulink的机器人虚拟现实仿真研究[D].哈尔滨工程大学,2007.
[2]陈云峰.射手虚拟现实训练系统研究[D].中北大学,2008.
[3]张宗涛.工程机械行驶驱动系统半物理仿真平台设计[D].长安大学,2009.
[4]邱荷.末敏弹全弹道运动仿真及虚拟现实技术研究[D].南京理工大学,2013.
猜你喜欢
科技与创新(2016年23期)2017-03-30
中国科技纵横(2017年3期)2017-03-29
山东工业技术(2017年4期)2017-03-28
求知导刊(2017年1期)2017-03-24
物联网技术(2017年2期)2017-03-15
农机使用与维修(2016年12期)2017-01-17
安徽理工大学学报·自然科学版(2016年1期)2016-12-14
计算机教育(2016年7期)2016-11-10
现代电子技术(2015年17期)2015-09-23
物联网技术(2014年4期)2014-04-19