
三相异步电动机制动简析
2018-05-31 09:05张利团
机电信息 2018年15期
张利团
(太原科技大学运城工学院,山西运城044000)
0 引言
在实际生产过程中,当生产机械切断电源后,由于机械惯性,三相异步电动机的转子需经过一段时间才能停止运转。而起重机的吊钩要求准确定位,万能铣床的主轴要求迅速停车,升降机在突然停电后需要安全保护和准确定位控制,这些都需要对拖动的电动机进行有效的制动。本文将讨论常用的电气制动方法及工作原理。
电气制动特点:
(1)电磁转矩T与转速方向n反向;
(2)制动不一定都减速。
电气制动的优点:安全、环保、简便、高效。三相异步电动机电气制动的方法有反接制动、能耗制动和回馈制动三种。
1 反接制动
三相异步电动机的反接制动可分为电源反接制动和倒拉反接制动,本文重点介绍后者。

1.1 电源反接制动
电源反接后,产生的电磁转矩T反向,对转子转速n来说是制动力矩,则转速迅速下降。注意:
(1)当转速n→0时,应迅速切断电源,防止反向启动。(离心式开关)当转速n<100 r/min时,将自动切断电源。
(2)笼型电机只能在定子绕组上串电阻,故不可频繁使用。
1.2 倒拉反接制动
重物“倒拉着”电机匀速运行,称为“倒拉反接制动”(图1)。
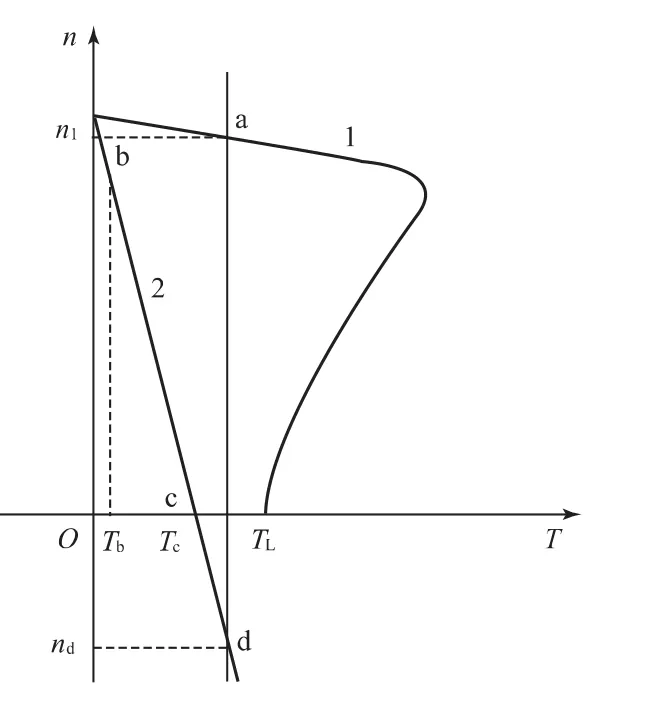
图1 三相异步电动机倒拉反接制动
(1)电机原运行于a点,提升重物。
(2)在转子回路中串入较大电阻Rb,转子由于惯性,转速来不及变化,由a→b,Tb<TL,由b点开始减速。
(3)当n=0时,Tc仍小于TL,则在重力作用下拖动电动机反向旋转,n<0,T为制动转矩,电动机进入反接制动状态。
(4)在重力负载作用下,电动机反向加速,到达d点时,转矩达到新的平衡Td=TL,重物“倒拉”着电机稳定运行。倒拉反接制动可以获得任意低的转速来下放重物,安全性好。
下面对倒拉反接制动原理用图解的方式来分析。如图2所示,将倒拉反接制动分解为四个过程,分别对应四个小图:
a)Ta=TL,T正,n正,匀速上升。
b)Tb<TL,T正,n减,减速上升,直至n=0。
c)Tc<TL,T反,n反,反向加速,下放重物。
d)Td=TL,T反,n反,匀速下降,稳定下放重物。

图2 倒拉反接制动原理分解图
2 能耗制动
能量消耗在转子绕组的电阻上,称为能耗制动。
(1)能耗制动方法:断交通直。
(2)工作原理:断开交流电源,接入直流电源,建立恒定磁场,转子惯性旋转发电,将动能转换为电能。
(3)制动过程:断开交流电源,接入直流电源的瞬间,由于机械惯性电动机转速来不及变化,由原运动状态a点平移至曲线1上的b点,如图3所示。
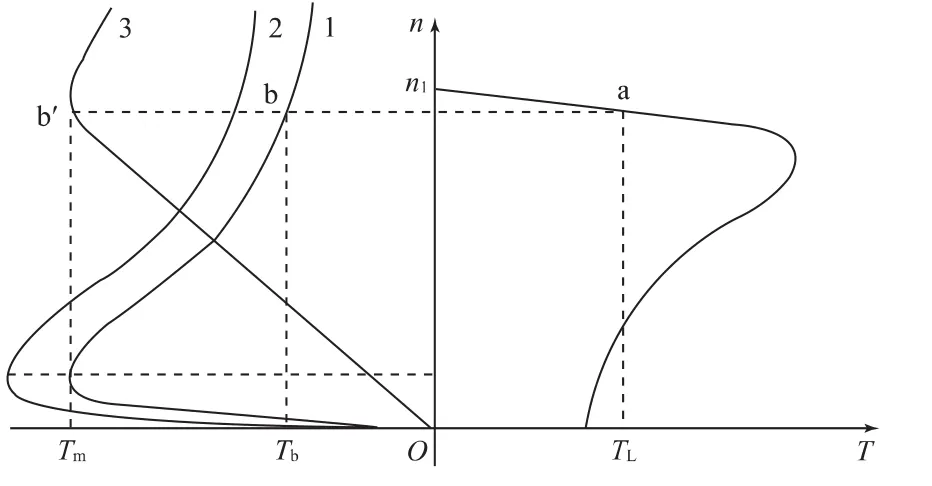
图3 三相异步电动机能耗制动
此时的电磁转矩Tb方向与nb方向相反,起制动作用。电动机转速迅速下降,直至n=0,能耗制动结束。由于串入较大的电阻,曲线3的机械特性变软,制动转矩更大,能达到迅速制动的效果。
能耗制动特点及应用:低速稳定下放重物,制动平稳,可实现精准停车,较经济。适用于要求减速平稳场合,如反抗性负载准确停车及下放重物;电动机容量较大和启制动频繁的场合也多用能耗制动。

3 回馈制动
由于某种原因使得处于电动运行状态的异步电机转速n大于同步转速n1,电动机过渡为发电运行状态。T与n反向,为制动转矩,电能回馈给电网。回馈制动分为两种情况:反向回馈制动,如起重机高速下放重物;正向回馈制动,变极、变频时,高速→低速档。
3.1 反向回馈制动
反向回馈制动可使起重机实现高速下放重物的要求。如图4所示,将正转提升重物状态的三相电源反接,转子转速由于惯性来不及变化,从a′点平移至曲线1上的b′点,在第二象限进行反接制动,当转速为零时,在电磁转矩Tc与重力转矩TL的共同作用下,电动机快速反向启动,沿曲线1反向加速,当速度等于同步速度-n1时,由于重力作用,电机继续加速,进入第四象限的反向回馈制动过程。到达a点时,Ta=TL,电机匀速高速下放重物,处于稳定的反向回馈制动状态。反向回馈制动下放重物时,转子所串电阻越大,下放速度越快。

图4 三相异步电动机反向回馈制动
下面来看一下反向回馈制动的图解过程,如图5所示。同样地,将反向回馈制动过程分解成四步,分别对应四个小图:
a)正转提升,T正,n正。
b)电源反接,T反,n减,直至n=0。
c)越过0点,反向启动,T反,n反,T+TL共同作用,n反向加速运行,直至n=-n1。
d)电磁转矩T的正向效应趋于零,开始变为反向制动转矩。电动机过渡为发电运行,能量回馈给电网。此处,倘若没有电动机提供的相对制动转矩T,重物则将成为自由落体运动。
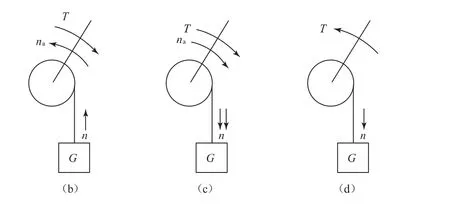
图5 反向回馈制动原理分解图
3.2 正向回馈制动
电机处于正转,电动运行状态时,改变磁极对数,P→2P,则转速减少为原来的一半,n=1/2n,转子惯性旋转,工作点由a点平移至b点开始减速,机械特性由第1条曲线转为第2条曲线运行,如图6所示。nb>n1′,进入正向回馈制动,在Tb与TL的共同作用下,电动机迅速减速,从b点到n1′的降速过程都是回馈制动过程。速度继续下降,n<n′时,电机处于异步电动机运行状态,直至T=TL,电机稳定运行。
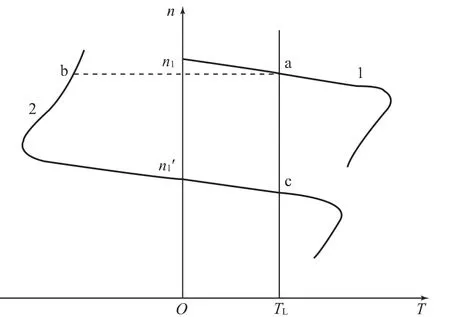
图6 三相异步电动机正向回馈制动
4 结语
总之,针对不同的制动需求,分别采取不同的电气制动方法,在实际生产工作中将产生良好的效果。
[1]许翏.电机与电气控制技术[M].北京:机械工业出版社,2005.
[2]胡幸鸣.电机及拖动基础[M].北京:机械工业出版社,1999.
猜你喜欢
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
防爆电机(2020年5期)2020-12-14
防爆电机(2020年3期)2020-11-06
哈尔滨铁道科技(2020年4期)2020-07-22
电子制作(2019年23期)2019-02-23
发明与创新·中学生(2018年10期)2018-10-15
中学生数理化·八年级物理人教版(2017年3期)2017-11-09
家庭百事通·健康一点通(2017年9期)2017-09-22
创新作文(1-2年级)(2017年1期)2017-04-19
中学生数理化·八年级物理人教版(2014年1期)2015-01-09
