
果园多功能视频遥控作业车的研制
2018-05-30 04:53:06范国强王学良张晓辉冯海明
江苏农业科学 2018年9期
范国强, 王学良, 张晓辉, 冯海明
(1.山东农业大学机械与电子工程学院,山东泰安 271018; 2.山东省园艺机械与装备实验室,山东泰安 271018;3.中通客车控股股份有限公司,山东聊城 252000)
近年来我国农业生产方式发展迅速,生产结构不断升级,果园种植面积日益扩大。随着我国城镇化的快速推进和劳动力向城镇的转移,果园作业实现机械化的需求越来越迫切。果园作业机械既能够节省大量的劳动力,又能提高工作效率和作业水平,因此在果园管理作业中具有重要作用。
因为我国果园主要采用矮化密植的种植模式,使得作业空间狭小,所以果园作业的机械化只能依靠小型作业机械。目前我国的果园作业机械主要依靠手动操作,存在劳动强大和作业环境恶劣(粉尘、蚊虫以及农药毒性等)等一系列问题。如果能够实现小型果园作业车的远程可视化遥控作业,则可以大大提高操作人员的安全性和舒适性。国内部分作业机型虽然可以实现远程遥控,但存在载重量小、行进速度慢、作业效率低、作业功能单一以及无视频监控等缺点[1-4],无法适应现代果园管理的需求。与欧美和日本等发达国家相比,我国的高科技农机远未广泛使用[5]。
针对我国国情,本研究设计一款小型多功能视频遥控作业车,该作业车具有结构紧凑、作业半径较小和机动灵活的特点,同时可以通过更换多种作业附具来实现多种作业,还可以通过远程视频进行遥控作业,可极大地提高操作人员的安全性和舒适性。
1 整机结构与性能
为适应果园狭小作业空间的要求,果园遥控作业车的整机必须结构紧凑,且控制可靠。液压传动具有传动路线简化、控制方便和功率密度大的优点,因此本机所有作业装置均采用液压传动进行驱动,使得整机结构紧凑。整机结构如图1所示,它主要由动力系统、液压传动系统、遥控系统、车架、行走装置和辅助工作装置等组成,其中动力系统主要包括发动机;液压系统包括齿轮泵、液压管路、液压缸以及压力变送器等;电气系统包括多路电磁阀、继电器等。
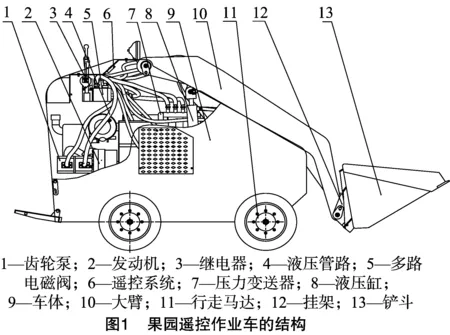
为适应大棚和矮化果园作业,整个车体设计得比较紧凑。车体通过销轴连接在行走机架上,发动机通过减震装置安装在车体的后半部分,以降低重心,提高整车的稳定性。遥控装置通过控制多路电磁阀,实现对整台机器的操控。大臂通过铰链轴安装在机体后上方,其前端安装铰接机架,挂架上有快换销轴,能够连接不同的辅助工作装置(铲斗、挖掘装置、开沟机、破碎机、钻孔施肥器等)。采用Solid Works对样机进行优化设计与装配,使得整机零部件布置紧凑,体积较小,设计的三维模型如图2所示。
整机性能以及结构参数如表1所示。
2 工作原理
汽油机带动双联齿轮泵输出高压油,为整个液压系统提供动力,通过遥控系统控制电磁阀的通断,进而实现对所有液压装置的控制,实现行走、举升和作业等各种动作。整机液压系统原理如图3所示,主要由行走回路、大臂举升回路以及附具工作回路构成。

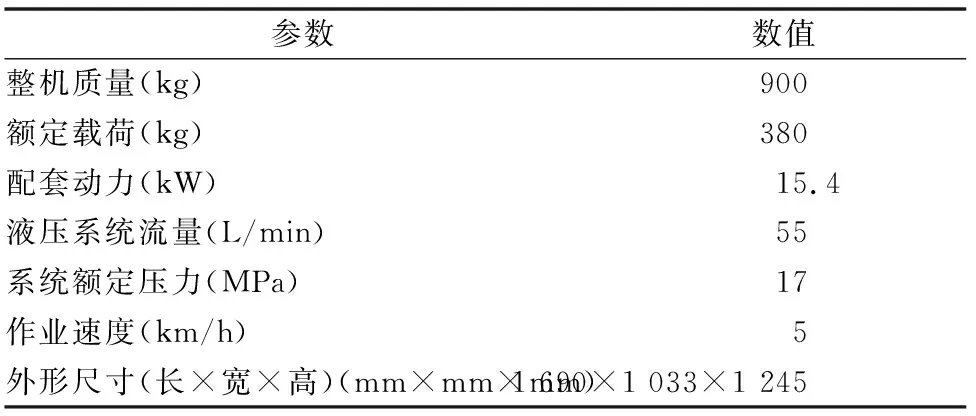
表1 作业机主要技术参数
根据行走功率和作业载荷确定齿轮泵、马达、液压油缸、系统总流量和发动机功率,由系统流量确定合适的电磁阀[6]。液压系统的参数如表2所示。
2.1 行走转向原理
作业车采用液压马达直接连接车轮的方式,实现作业车行走。2个定量液压泵分别控制左右两侧后驱动轮的液压马达,通过分别控制2路的2位3通电磁换向阀和3位4通电磁换向阀来控制2个液压马达的同步或差速运动,从而实现作业车的直行或转向。
2.2 辅助装置工作原理
如图3所示,当左路的2位3通电磁换向阀和相应的3位4通电磁换向阀通电后,则接通当前回路的附具位置控制油缸,通过改变阀芯位置控制大臂油缸伸缩,从而实现大臂的举升。附具是主要的工作装置,为灵活地适应工作环境,须要适时调整附具位置。连通右路的2位3通电磁换向阀和相应的3位4通电磁换向阀,则接通当前回路控制附具的油缸伸缩,实现附具位置的调整。
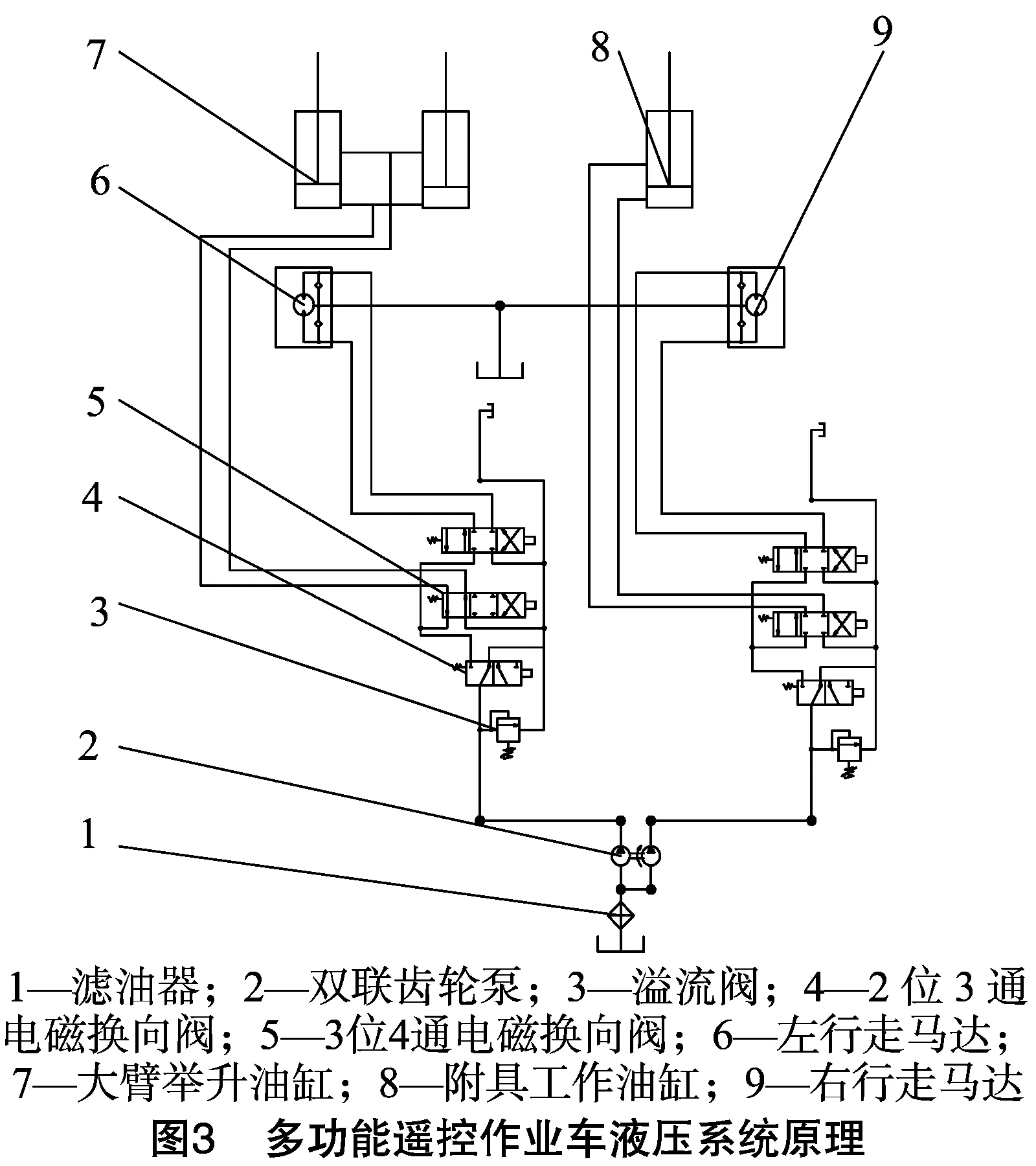

表2 液压系统参数
2.3 遥控系统工作原理
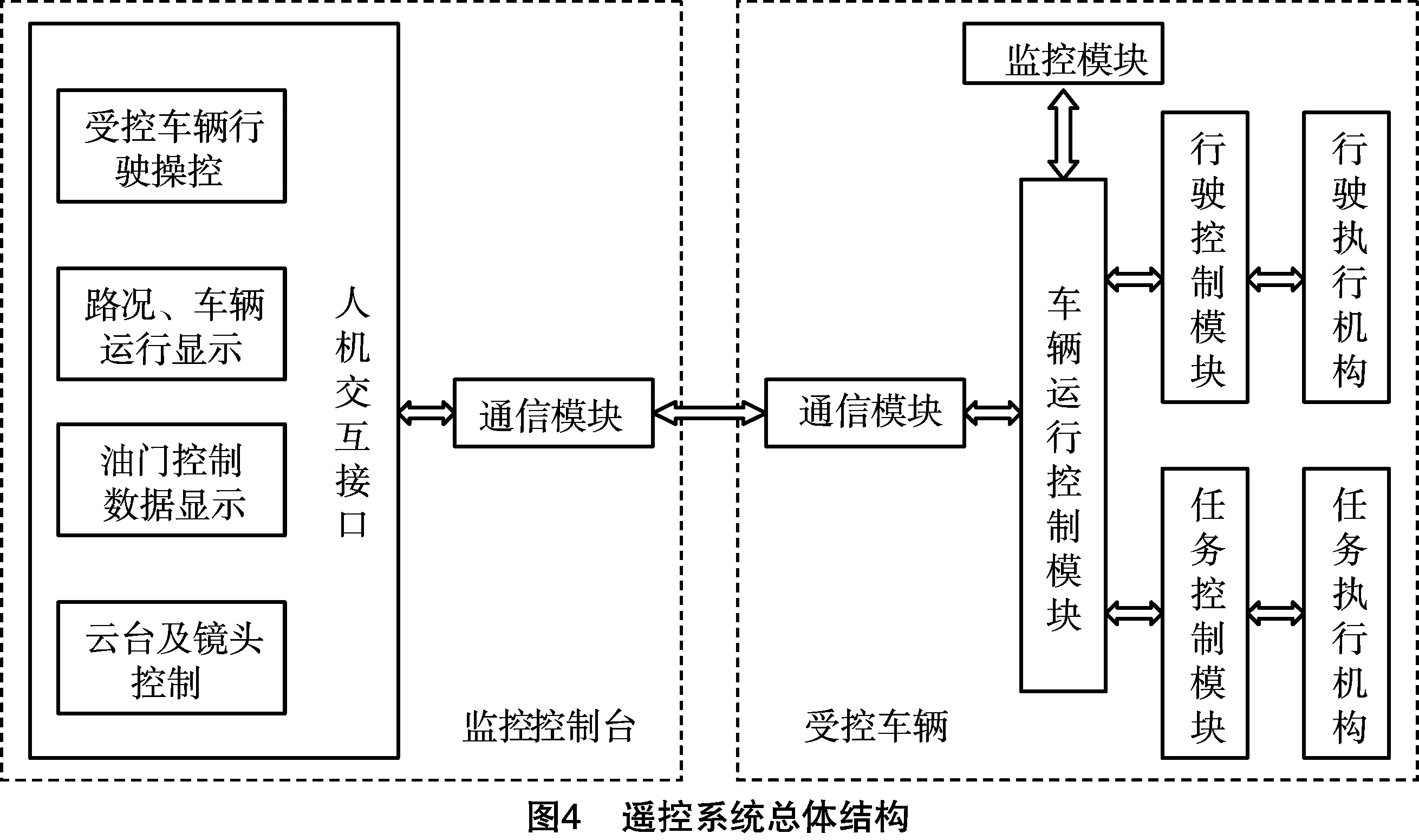
上位机监控系统通过通信模块实现对下位机即作业车的远程监控和操作,下位机同时连接多路电磁阀,通过电磁阀控制各个液压回路的通断,进而控制液压马达、液压缸的动作,从而实现对作业车行走和各种作业的控制。图4为遥控系统的总体结构。
2.3.1 遥控系统硬件构成 遥控系统主要由远程遥控端、通信中转站和车载受控端组成。远程监控端利用视频采集软件开发工具包(software development kit,简称SDK)的二次开发技术实现下位机系统采集的视频信息和处理的数据信息在显示屏上的实时显示,同时也可以通过功能控制无线网络联系车载受控系统,其硬件系统包括PC机、无线视频接收器、无线控制指令发射器、视频采集卡和RS-485转化器等。
通信中转站是联系监控中心和作业车的无线传输系统。该系统的功能控制网络和视频信号网络是2个相互独立的系统。功能控制网络由无线微波收发器组成,其信号遵循一定的编码协议,系统通电后自动搭建无线网络,视频信号网络采用视频收发器进行传输,采用专用的1.2 G频段。
车载受控端的遥控部件主要由STM32控制器、摄像头、视频发射器、控制信号接收器和驱动继电器等各类传感器组成。
2.3.2 遥控软件结构 遥控软件主要包括监控中心软件、通信协议、下位机系统程序等三大系统。
2.3.2.1 上位机系统 监控中心系统即上机位系统,监控中心软件是基于VC++开发的视频采集和动作控制监控软件,其结构功能如图5所示。

2.3.2.2 下位机系统 下位机软件系统是主要的控制系统,负责信息的采集上传和执行器的动作控制[7-8]。其软件系统流程如图6所示。
2.3.2.3 通信协议 通信协议是上位机与下位机之间上传下达的重要桥梁,通信系统控制信号采用自定义协议格式,数据信号传递以帧为基本单位,所有数据均采用十六进制格式[9-11]。本系统不论上传还是下发,均要求有应答帧,在规定时间内若无回复则重新发送,连续5次无回复,则须要复位重启,这是为系统设计的心跳包机制[12],可有效避免因信号故障导致作业车失控的现象。
3 样机性能试验
为验证样机的可靠性,检测作业车各项性能,在山东农业大学农学试验站对设计的样机进行相关测试。
本次试验分为2个阶段,共试验20次。第1阶段为指令试验,遥控距离为50 m,试验次数为10次,试验中作业车可准确快速执行前进、倒退、转弯、大臂举升、附具位置调整等操作,且监控的视频图像清晰流畅。第2阶段为载荷试验阶段,遥控距离为300 m,试验次数为10次,作业车顺利完成380 kg沙土的铲取和装载工作。整机性能测试如表3所示。试验证明,整机运行平稳,动作控制可靠,监控端视频清晰流畅,指令传输迅速,样机响应迅速。
4 结论
针对密植果园作业空间狭窄的特点,采用液压传动系统,研制一种可远程视频遥控的小型作业车。该作业车具有结构紧凑、作业半径较小和机动灵活的特点,同时可以更换多种作业附具实现多种作业。
针对密植果园作业中存在的安全性和舒适性较差问题,基于VC++开发一套由远程遥控端、通信中转站和车载受控端组成的远程视频遥控系统,可实现对作业车的远程视频遥控。试验证明,该遥控系统动作控制可靠,监控端视频清晰流畅,指令传输迅速,样机响应迅速,能够满足果园作业要求。
:
[1]胡 炼,罗锡文,张智刚,等. 基于CAN总线的分布式插秧机导航控制系统设计[J]. 农业工程学报,2009,25(12):88-92.
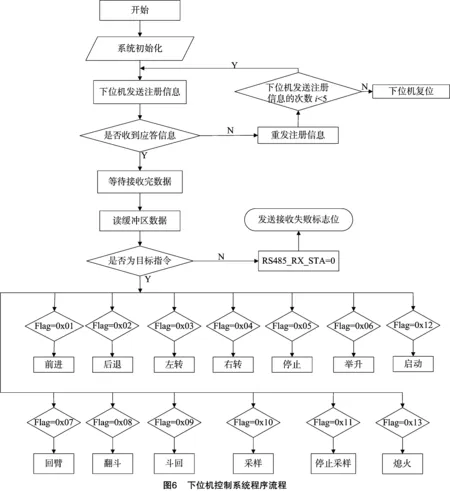

表3 整机性能测试
[2]胡 炼,罗锡文,赵祚喜,等. 插秧机电控操作机构和控制算法设计[J]. 农业工程学报,2009,25(4):118-122.
[3]蒋 蘋,胡文武,孙松林,等. 水田作业机械无线遥控系统设计[J]. 农机化研究,2009,31(6):62-64,68.
[4]刘美丽,杨福增,张季琴. 一种小型多功能田间管理机的设计[J]. 拖拉机与农用运输车,2011,38(3):82-84.
[5]冯开林. 工程车辆遥控及其关键技术研究[D]. 西安:西安交通大学,2003.
[6]雷天觉. 新编液压工程手册[M]. 北京:北京理工大学出版社,2005.
[7]张俊峰. 山地果园单轨运输机遥控关键技术与装置的研究[D]. 武汉:华中农业大学,2012.
[8]许丽佳,冉春森,王文娟,等. 小型无线遥控和实时配药喷施机的研制[J]. 农业工程学报,2012,28(10):13-19.
[9]王孝良,宋国振,安 毅. 基于GPRS的远程实时数据采集监控系统[J]. 仪器仪表与分析监测,2005(1):23-26,35.
[10]王建新,杨世凤,史永江,等. 远程监控技术的发展现状和趋势[J]. 国外电子测量技术,2005,24(4):9-12.
[11]连加典. 基于GPS/GPRS工程车辆远程监控系统的设计与实现[D]. 长沙:湖南大学,2003.
[12]胡志坤,何多昌,桂卫华,等. 基于改进心跳包机制的整流远程监控系统[J]. 计算机应用,2008,28(2):363-366.
猜你喜欢
水电站机电技术(2024年2期)2024-02-28 06:55:08
青少年科技博览(中学版)(2023年1期)2023-03-17 00:44:42
今日农业(2022年16期)2022-09-22 05:38:48
快乐语文(2021年27期)2021-11-24 01:29:16
阅读(低年级)(2019年9期)2019-11-15 11:07:53
语文世界(小学版)(2019年2期)2019-02-24 08:24:34
小学生作文(低年级适用)(2017年9期)2017-10-13 08:04:27
电子制作(2016年19期)2016-08-24 07:49:48
小天使·一年级语数英综合(2014年7期)2014-06-26 14:45:18
筑路机械与施工机械化(2014年2期)2014-03-01 02:57:59
