
无人机多光谱遥感反演抽穗期冬小麦土壤含水率研究
2018-05-30 02:07:30陈硕博陈俊英张智韬王禹枫石树兰
节水灌溉 2018年5期
陈硕博,陈俊英,张智韬,边 江,王禹枫,石树兰
(1.西北农林科技大学水利与建筑工程学院,陕西 杨凌 712100;2.西北农林科技大学旱区农业水土工程教育部重点实验室,陕西 杨凌 712100)
农田土壤水分直接影响到作物生长的水、肥、气、热等状况,与作物生长关系最为密切[1]。及时准确监测作物的田间土壤水分是实现精准灌溉的关键。近些年来,利用遥感数据大面积测定农田土壤水分已成为国内外研究的重点和热点[2-6]。但目前卫星遥感数据的时间、空间分辨率较低,较难满足新形势下精准灌溉的需要。而无人机遥感具有获取影像速度快、分辨率高等优点,可以迅速而准确地完成一定区域内的农情监测任务[7-9]。
国外学者在农用无人机遥感方面起步较早,并已取得了显著的成果。Berni等[10]利用无人机搭载热红外和多光谱传感器来获取作物冠层温度和植被指数进而反演叶面积指数、叶绿素浓度和水分胁迫取得了良好的效果;Hassanesfahani等[11]利用机载多光谱相机获得的高分辨率遥感影像结合人工神经网络算法,较好地反演了土壤表层水分含量。国内在近几年来,利用无人机遥感技术在农情监测和信息提取方面亦取得了较多的成果。田明璐等[12, 13]使用多旋翼无人机搭载高光谱相机获取高光谱影像反演棉花叶面积指数和叶绿素含量;韩文霆等[14]使用无人机获取了玉米拔节期的可见光图像,提取其种植信息;裴浩杰等[15]使用高光谱相机与无人机系统组成的遥感监测系统建立了冬小麦长势无人机遥感监测模型。以上研究大多基于无人机遥感图像提取的作物冠层信息与地面测得的冠层结构参数建立反演模型,而间接反演土壤水分却鲜有研究。
本文以关中地区冬小麦为研究对象,通过无人机载六波段多光谱相机获取冬小麦冠层反射率信息,尝试与实时的田间土壤含水率建立一元及多元统计模型并进行验证,以期为冬小麦田间土壤水分监测提供新的研究手段。
1 材料与方法
1.1 研究区概况
田间试验于2017年4月24-30日在陕西杨凌西北农林科技大学旱区农业水土工程教育部重点实验室试验田(34°17′N,108°04′E,海拔521 m)进行。试验区域属暖湿带季风半湿润气候区,年均日照时数2 163 h,无霜期210 d,多年平均气温12.5 ℃,年均降水量630 mm,年均蒸发量1 500 mm。试验田土壤为中壤土,田间持水率为24%(质量含水率),土壤干容重1.40 g/cm3,0~20 cm土层土壤pH为8.14,有机碳含量8.20 g/kg,全氮含量0.62 g/kg。
1.2 试验设计
本试验供试冬小麦品种为关中地区主栽品种之一的小偃22,施肥水平与该地区大田施肥水平一致。于2016年10月15日播种,采用条播种植,2017年6月7日成熟收获。以不同的灌水定额和播种行距作为试验因素,分为4个灌水时期:分蘖期、返青期、拔节期、抽穗期。设置4个灌溉水平,分别为田间持水量的45%、60%、75%和90%。设置2个播种行距,分别为宽行距(45 cm),窄行距(20 cm)。每个试验小区面积5 m×4.5 m,具体试验处理见表1。
1.3 数据采集
(1)无人机平台与遥感传感器。遥感平台为大疆创新公司生产的经纬M600六旋翼无人机,遥感影像获取使用的传感器为Micro-MCA多光谱相机(简称MCA)。MCA由美国Tetracam公司生产,具有质量轻、体积小及远程触发的特点,非常适合在中小型无人机上进行搭载及拍摄。该相机有6个镜头,分别对应6个波段,波长分别为490 nm(蓝光)、550 nm(绿光)、680 nm(红光)、720 nm(红边)、800 nm(近红外)、900 nm(近红外)。

表1 冬小麦试验处理Tab.1 Experimental treatments of winter wheat
(2)作物冠层光谱的获取。无人机遥感影像于2017年4月24-30日在田间采集,采集时刻为中午12∶00左右,天气晴朗无风,视野良好。此时冬小麦生长正处于抽穗期,生长旺盛,具有一定的代表性[16, 17]。无人机飞行高度为30 m,镜头垂直向下,地面分辨率约为1.6 cm。获取无人机遥感影像前,在试验区域内布置标准白板进行辐射标定,从而获取小麦冠层光谱反射率。用多光谱相机自带的软件Pixel Wrench2对遥感图像进行预处理,在ENVI 5.3软件中提取反射率数据,数据分析借助于IBM SPSS Statistics 21。
(3)土壤水分数据获取。使用EM50(Decagon Devices, Inc.USA)土壤水分数据采集器测定土壤含水率,EM50连接有5个探头,埋设在小区中央,深度分别为10、20、30、40、60 cm。数据采集器设置为每0.5 h记录数据一次。每个物候期内用土钻采集与传感器埋深相同的土样,用烘干法测定土壤含水率,对EM50数据进行标定。
1.4 数据处理
本次试验一共进行7 d,其中5 d数据用于建模,另外2 d数据用于验证。数据处理分宽行、窄行和宽窄行3种情况分别进行讨论。宽行与窄行各有4个小区,每个小区采样4次,所以宽行和窄行各有80个建模样本和32个验证样本,而宽窄行则有160个建模样本和64个验证样本。
以研究区域内的8号小区为参考点,采用遥感影像数据与参考点影像数据的差值进行研究。8个小区的六波段反射率与土壤含水率分别与参考点作差值处理,得到不同波段的差值反射率(DR)与不同深度的差值土壤含水率(DSM)。DRb、DRg、DRr、DRre、DRn1、DRn2分别表示蓝光波段、绿光波段、红光波段、红边位置、近红外波段1与近红外波段2处的差值反射率。
分宽行距、窄行距及宽窄行对不同波段DR与不同深度DSM进行相关性分析,选取2者极显著相关且相关系数r>0.8的波段与深度,建立单波段DR与DSM的线性模型并验证;选取极显著相关的波段与深度,建立多波段DR与DSM的多元线性回归模型并验证。对于模型的精度评定采用R2作为评价指标,R2越接近1,说明回归方程对样本数据点的拟合优度越高;反之,R2越接近0,拟合优度越低。预测效果通过验证R2、预测均方根误差RMSEP2个参数来检验。验证R2越大,预测均方根误差RMSEP越小,表征模型的预测反演效果越好[18, 19]。计算公式如下:
(1)
(2)

2 结果与分析
2.1 土壤含水率敏感波段选取
8个小区的六波段光谱反射率与土壤含水率分别与参考点作差值处理,得到不同波段的差值反射率(DR)与不同深度的差值土壤含水率(DSM),进而分析各个波长位置处冬小麦冠层光谱差值反射率(DR)与不同深度土壤差值含水率(DSM)之间的相关关系,结果见表2。
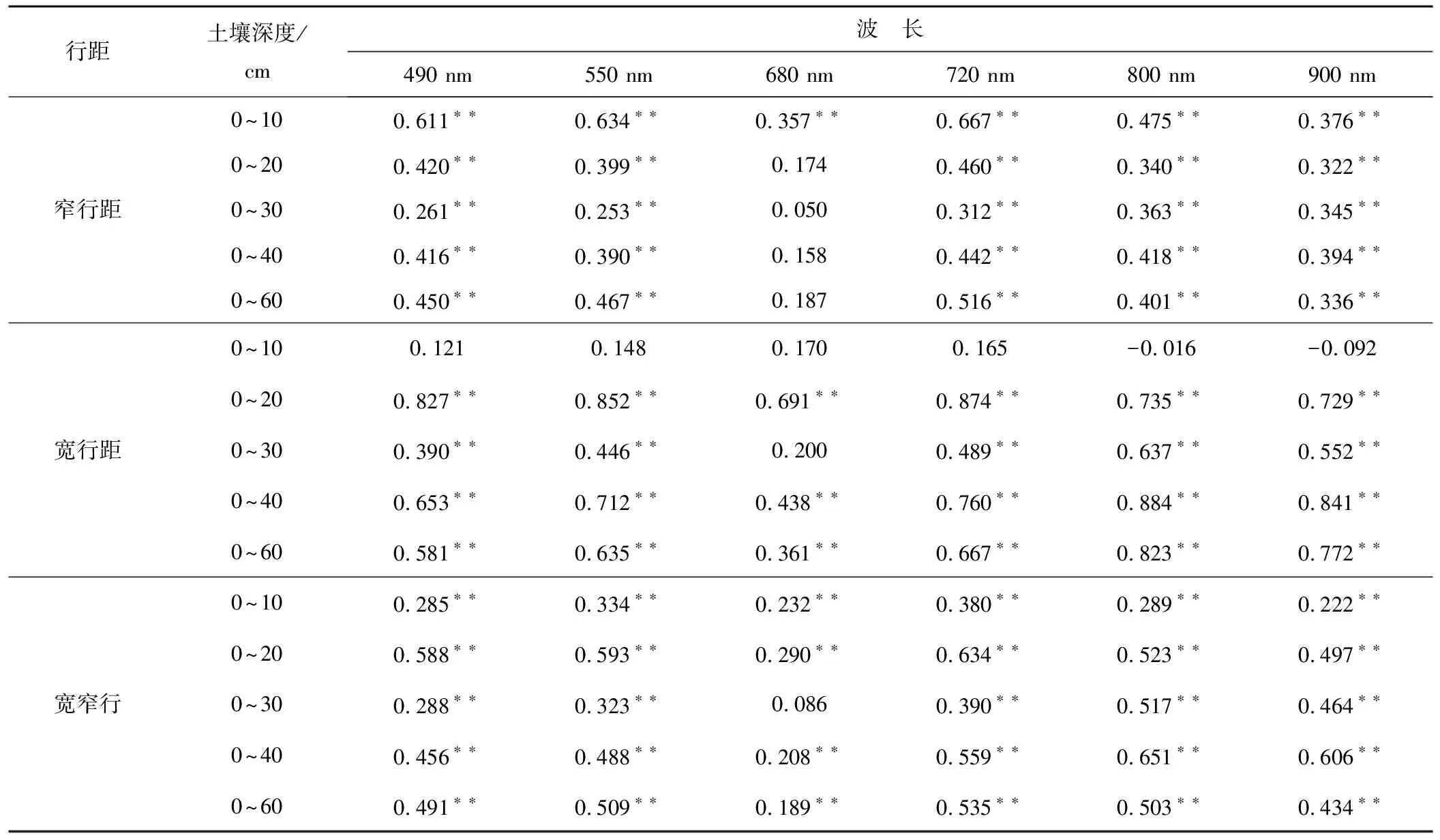
表2 不同波段的差值反射率(DR)与不同深度差值土壤含水率(DSM)的相关系数Tab.2 Correlation coefficients between difference of reflectivity (DR) in different bands and difference of soil moisture content (DSM) at different depths
注: *表示在 0.05 水平上显著; **表示在 0.01 水平上极显著。
从表2中可以看出,在窄行距中,只有土壤深度是20~60 cm,波长为680 nm时,DSM与DRr不显著相关,其他情况下,2者均极显著相关,但相关系数均较小;在宽行距中,0~10 cm的DSM与各个波段的DR均不显著相关,680 nm时,0~30 cm的DSM与DRr不显著相关,其他情况下2者均极显著相关;在宽窄行中,除680 nm时,0~30 cm的DSM与DRr不显著相关外,其他均极显著相关,但相关性亦不强。通过以上对比分析,从中选取DSM和DR极显著相关且r>0.8的6组数据进行单波段一元拟合与验证,对比选取最优模型;再用多元线性回归的方法对DSM与6个波段均极显著相关的DR进行拟合与验证,对比选取最优模型。
2.2 一元线性模型的建立与验证
在宽行距、窄行距和宽窄行3种情况下,只有宽行距中0~20 cm土壤深度的DSM与DRb、DRg、DRre,0~40 cm土壤深度的DSM与DRn1、DRn2,0~60 cm土壤深度的DSM与DRn1的相关系数大于0.8,分别建立起2者的一元线性关系,结果汇总见表3。

表3 基于敏感波段的一元线性模型Tab.3 The single linear models based on sensitive bands
通过比较发现,当土壤深度是0~20 cm时,与DSM敏感的3个波段的建模R2分别达到了0.684、0.727、0.764;当土壤深度是0~40 cm时,与DSM敏感的2个波段的建模R2分别为0.781、0.708;当土壤深度是0~60 cm时,建模R2为0.678。
为了验证表3中6个模型的预测效果,将验证集中的DR代入模型计算得预测DSM,通过对预测值和实测值进行相关性分析,绘制2者之间的1∶1关系图,结果见图1。

图1 各深度一元线性模型预测DSM与实测DSM比较Fig.1 Comparison of predicted DSM with measured DSM at different depths in the single linear models
由图1比较可以看出,6组模型的验证R2分别达到了0.603、0.690、0.769、0.823、0.763、0.685,其中模型4的R2最大,而RMSEp最小,只有0.026,说明在0~40 cm土壤深度下,利用波长为800 nm作为敏感波段建立的模型最优。在冬小麦抽穗期内,次生根达到最大值,而次生根比初生根粗壮,并且有较多的分支和根毛,是吸收水分的主要部位[20],80%以上的次生根分布于0~40 cm土层内,土壤水分的变化可以通过小麦冠层的变化反映出来,这就证明了该模型的可靠性。由于深度越大,土壤含水率变化越不明显,所以0~60 cm的DSM实测值几乎无明显变化。因为预测DSM与敏感波段的DR是一元线性关系,所以当DR变化时,预测DSM也有相应的变化。因此出现了图1(f)中的实测值与预测值“一对多”的现象。
2.3 多元线性回归模型的建立与验证
在窄行距、宽行距及宽窄行3种条件下,在5种土壤深度下,分别建立不同深度DSM与6个波段DR的多元线性回归模型共计15个。对各个模型的回归系数进行t检验后,剔除回归系数不显著的自变量,筛选出6个模型,汇入表4。
由表4可以看出,在窄行距0~10 cm土壤深度下建立的三元回归模型的R2达到了0.702,回归系数显著的只有蓝波段和2个近红外波段。在宽行距4组深度下均可建立多元回归模型,其中0~20 cm土壤深度下建立的三元回归模型的R2达到了0.890,回归系数显著的有红边波段和2个近红外波段;0~30 cm土壤深度下R2为0.712,显著的波段仅为2个近红外波段;0~40 cm深度下R2达到了0.904,这与一元线性模型得到的结论相同,显著的波段有4个,分别为蓝波段、红波段与2个近红外波段;0~60 cm深度下R2为0.769,显著的波段同样为2个近红外波段。宽窄行0~20 cm土壤深度下建立了二元回归模型,R2为0.753,显著波段为绿波段和红边波段。
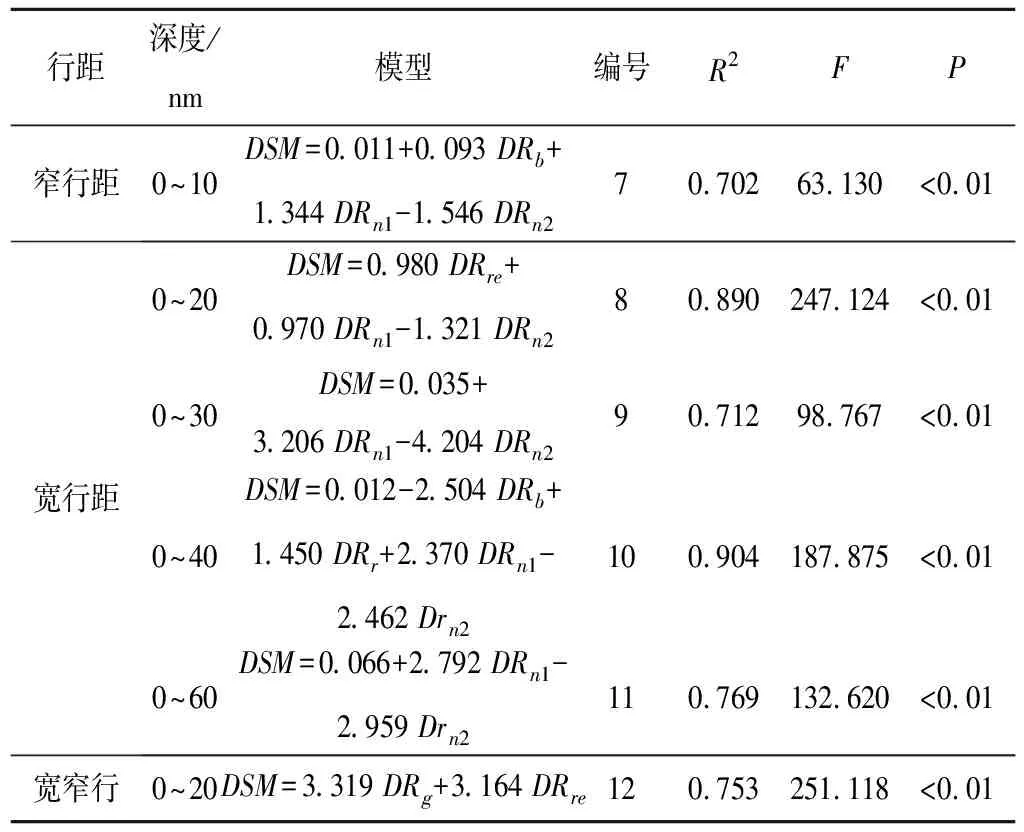
表4 剔除回归系数不显著的多元线性回归模型Tab.4 Multivariate linear regression models with significant regression coefficients
为了验证不同行距6组模型的预测效果,将验证集中的DR代入模型计算得预测DSM,通过对预测值和实测值进行相关性分析,绘制2者之间的1∶1关系图,结果见图2。
通过图2对比发现,模型12的验证R2仅有0.437,是6个模型中的最小值,而RMSEp为0.062,是6个模型中的最大值。宽行距0~40 cm土壤深度下建立的模型10验证R2达到了0.920,为6个模型中的最大值,RMSEp仅为0.016。其次为模型8,验证R2为0.853,但RMSEp为0.034。窄行距0~10 cm土壤深度下建立的模型7,亦取得了较好的效果。综合比较6个模型,得出模型10的预测效果最佳。这与一元线性模型得出了类似的结论,说明在宽行距下0~40 cm土壤深度为监测冬小麦抽穗期土壤水分的最佳深度。
3 结 论
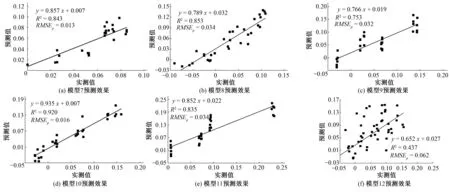
图2 多元回归模型预测DSM与实测DSM比较Fig.2 Comparison of predicted DSM with measured DSM in multivariate linear regression models
(1)通过相关性分析可以提取多光谱对土壤含水率的敏感波段,不同深度土壤含水率的敏感波段不同,不同行距土壤含水率的敏感波段亦不相同。
(2)抽穗期冬小麦的土壤水分反演,以宽行距中0~40 cm土壤深度下建立的模型最优。一元模型中,以波长为800 nm的近红外波段为自变量建立的模型最优;多元模型中,四元回归模型的建模R2和验证R2均达到了0.9以上,RMSEp仅为0.016,是进行抽穗期冬小麦土壤水分估算的最优模型。
(3)在冬小麦抽穗期所建立的模型反演根域土壤含水率具有较高的精度,但冬小麦其他物候期土壤水分的反演还有待进一步研究。研究成果可以为抽穗期冬小麦的精准灌溉提供一定的理论依据,同时也为无人机遥感的应用提供了新的思路。
:
[1] 汪志农. 灌溉排水工程学[M]. 2版. 北京:中国农业出版社, 2009.
[2] 张智韬, 陈俊英, 刘俊民, 等. TM6对遥感主成分分析监测土壤含水率的影响[J]. 节水灌溉, 2010,(4):16-19.
[3] 张智韬, 李援农, 杨江涛, 等. 遥感监测土壤含水率模型及精度分析[J]. 农业工程学报, 2008,(8):152-156.
[4] George P, Petropoulos G I. Surface soil moisture retrievals from remote sensing[J]. Physics and Chemistry of the Earth, 2015,83-84:36-56.
[5] Hatanaka T N A N R. Estimation of available moisture holding capacity of upland soils using Landsat TM data[J]. Soil Science and Plant Nutrition, 1995,41(3):577-586.
[6] James Cashiona V L D B. Microwave remote sensing of soil moisture evaluation[J]. Journal of Hydrology, 2005,307(1-4):242-253.
[7] 刘建刚, 赵春江, 杨贵军, 等. 无人机遥感解析田间作物表型信息研究进展[J]. 农业工程学报, 2016,(24):98-106.
[8] 李德仁, 李 明. 无人机遥感系统的研究进展与应用前景[J]. 武汉大学学报(信息科学版), 2014,(5):505-513.
[9] 李勇志, 支晓栋, 唐海龙, 等. 无人机遥感技术在农业中的发展与应用[J]. 安徽农业科学, 2015,(25):350-351.
[10] Berni J A J, Zarco-Tejada P J, Suarez L, et al. Thermal and narrowband multispectral remote sensing for vegetation monitoring from an unmanned aerial vehicle[J]. IEEE Transactions on Geoscience & Remote Sensing, 2009,47(3):722-738.
[11] Hassanesfahani L, Torresrua A, Jensen A, et al. Assessment of surface soil moisture using high-resolution multi-spectral imagery and artificial neural networks[J]. Remote Sensing, 2015,7(3):2 627-2 646.
[12] 田明璐, 班松涛, 常庆瑞, 等. 基于低空无人机成像光谱仪影像估算棉花叶面积指数[J]. 农业工程学报, 2016,(21):102-108.
[13] 田明璐, 班松涛, 常庆瑞, 等. 基于无人机成像光谱仪数据的棉花叶绿素含量反演[J]. 农业机械学报, 2016,(11):285-293.
[14] 韩文霆, 李 广, 苑梦婵, 等. 基于无人机遥感技术的玉米种植信息提取方法研究[J]. 农业机械学报, 2017,(1):139-147.
[15] 裴浩杰, 冯海宽, 李长春, 等. 基于综合指标的冬小麦长势无人机遥感监测[J]. 农业工程学报, 2017,(20):74-82.
[16] 徐莉平, 刘 钰, 张建丰, 等. 冬小麦抽穗期土壤水分对生理指标影响的试验研究[J]. 水资源与水工程学报, 2013,(3):23-25.
[17] 李卫国, 王纪华, 赵春江, 等. 冬小麦抽穗期长势遥感监测的初步研究[J]. 江苏农业学报, 2007,(5):499-500.
[18] Loague K, Green R E. Statistical and graphical methods for evaluating solute transport models: overview and application[J]. Journal of Contaminant Hydrology, 1991,7(1-2):51-73.
[19] Willmott C J. Some comments on the evaluation of model performance[J]. Bulletin of the American Meteorological Society, 1982,63(11):1 309-1 369.
[20] 于振文. 作物栽培学各论:北方本[M]. 2版. 北京: 中国农业出版社, 2013.
猜你喜欢
新农民(2021年15期)2021-09-16 09:47:57
西藏农业科技(2018年4期)2018-04-25 06:39:26
植物保护(2017年1期)2017-02-13 06:44:34
高原山地气象研究(2016年2期)2016-11-10 06:06:27
中学生(2015年4期)2015-08-31 02:53:50
安徽农业科学(2015年33期)2015-03-19 06:44:16
塔里木大学学报(2014年3期)2014-03-11 18:47:27
新疆农垦科技(2014年5期)2014-02-28 19:20:00
新疆农垦科技(2014年2期)2014-02-28 19:19:18
湖南农业科学(2014年20期)2014-02-27 14:32:55
