广角摄像机标定及畸变图像修正方法研究∗
2018-05-29 11:50刘立坤刘海波
舰船电子工程 2018年5期
刘立坤 刘海波
(92124部队 大连 116023)
1 引言
在工程应用中,光学跟踪测量是一种获取实验信息的重要手段,具有客观、非接触、高精度和优于无线电测量抗干扰能力等诸多优势。广泛应用的广角镜头、鱼眼镜头等,在镜头设计上就采取了曲面成像技术,这导致光学畸变更加显著,造成图像中的目标尺寸及外形比例都发生了较大改变。目前,为获取大视角图像信息,在工程实验中已经开始利用无人机搭载广角摄像机监控敏感区域,对广角畸变图像修正已成为急需解决的课题。
2 摄像机标定方法
摄像机标定指的是建立摄像机图像点位置和三维空间实际点位置之间的关系摄像机模型,通过已知的特征点图像坐标与摄像机坐标来计算摄像机模型参数,这是进行光学畸变修正[1]的基础。
2.1 单目摄像机模型
依据光学成像原理,建立摄像机光学成像模型的坐标系关系(见图1),以光轴中心O为坐标系原点,z轴满足右手法则。成像原点Of所代表平面为像平面坐标系(实际应用中,以图像左上角为坐标系原点),实际物体坐标系即为世界坐标系[2]。
其中,P在世界坐标系的值为Pu是P在像平面坐标系的投影点,其摄像机坐标系的值为(Xu,Yu,Zu)。θ是摄像机坐标系Z轴与像平面夹角,一般情况下Z轴与像平面垂直,θ值为90°。且摄像机坐标系xOy与像平面xfOfyf平行,f为摄像机的焦距。
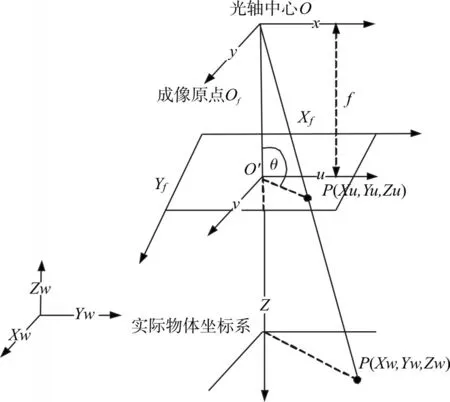
图1 单目摄像机模型的三坐标系统关系
2.2 摄像机内参数求解
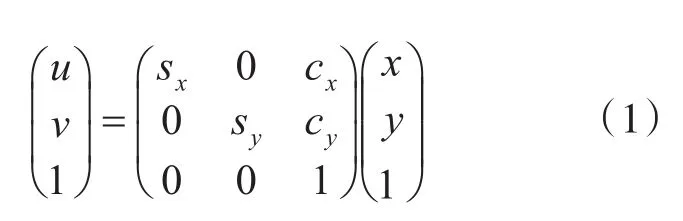
对于从摄像机坐标系到像平面坐标系的变换,像平面坐标系是用像素单位来表示的,而摄像机坐标系则是以毫米为单位来表示,因此,要完成改变换过程就需要先得到像平面的像素单位与毫米单位之间的线性关系。在图1中,摄像机光轴中心z轴方向上与像平面的交点O′称为投影中心或主点位置,坐标为(cx,cy),是像素单位,而每个像素在Xf和Yf的物理尺寸为,单位是像素/毫米,则像平面的像素与毫米间的线性关系如式(1):
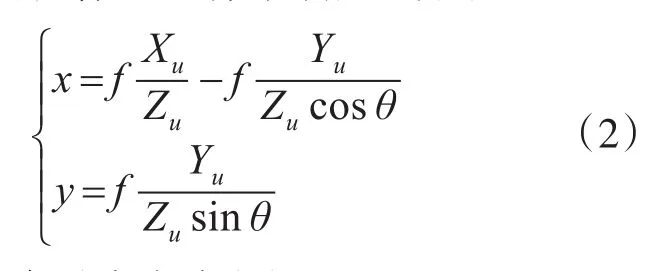
根据小孔模型下投影变换原理,像平面的物理坐标(x,y)对应的摄像机坐标系满足式(2):
其对应的矩阵形式为式(3):
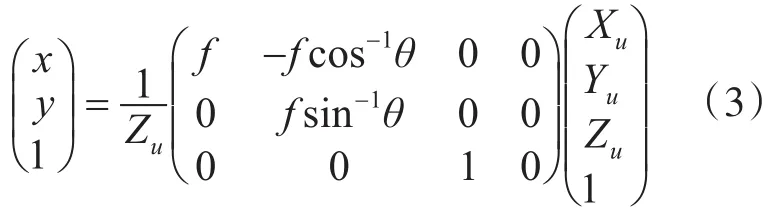
联立式(1)和式(3),得到式(4)即为摄像机坐标系与像平面坐标系变换的矩阵。
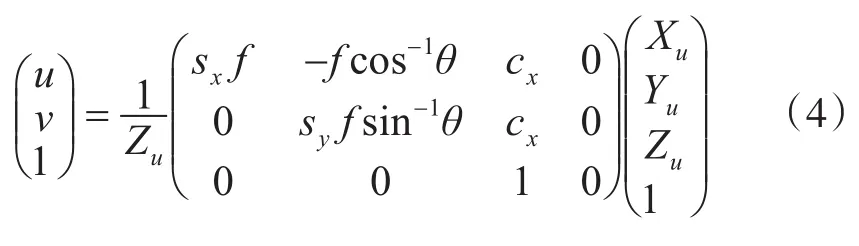
其中,即为摄像机的6个内参数,其组成的矩阵即为内参矩阵。
3 畸变修正模型
在广角镜头的图像畸变中,通常考虑两种畸变类型:径向畸变、切向畸变[3~4]。这两种畸变的产生原因和对图像几何变形的影响程度也各不相同。图像畸变效果如图 2所示[5~6]。
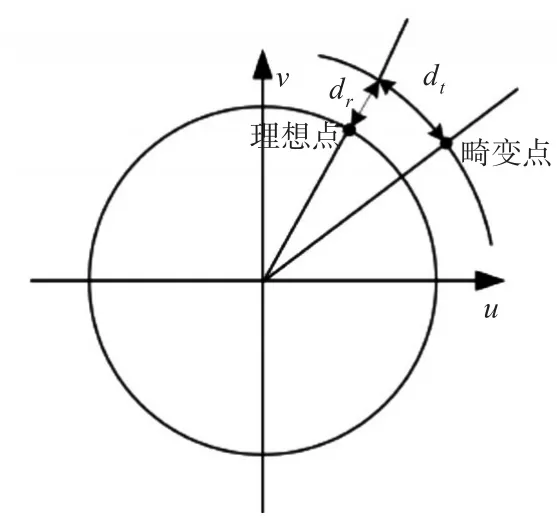
图2 畸变效果图径向畸变模型
径向畸变就是指图像点与真实点在半径方向上产生的变形。镜头径向畸变在诸多畸变类型中是最为主要的。通常将广角镜头的径向畸变[7]数学模型表示如下:

其中(x,y)为畸变点在图像上的原始坐标,(xtangential,ytangential)为图像校正后的坐标,称为镜头的径向畸变系数。对于精度较高的工业摄像机,一般只需要计算前两项k1、k2;对于广角或者广角摄像机,要求计算k1、k2、k3。
广角镜头的切向畸变产生原因在于镜头系统的组装过程,广角镜头的组装往往不能够保证镜头的光心与镜头的几何中心相重合。广角镜头的切向畸变数学模型[8]如下:
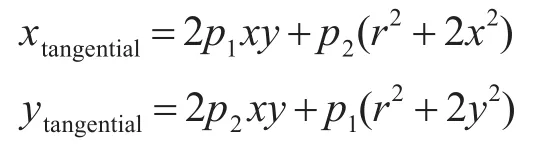
其中:(x,y)坐标是广角镜头图像畸变像素点在摄像机图像平面的原始坐标位置,为经过图像畸变校正后的新坐标位置。p1与p2为描述广角摄像头切向畸变程度的待定系数。
4 畸变修正效果分析
4.1 实验摄像机参数标定
本次采用标定板进行实验室标定,标定板尺寸为320(mm)×300(mm),即16行15列240个20mm的正方形方格组成。对于摄像机采集的图像,位姿越多,标定结果也会越精确,考虑到计算效率与精度,建议在20组~30组之间。将标定图像加载到标定系统中,计算摄像机的内参数和畸变系数[9~10]。
本次待标定的摄像机型号为GoproHERO4(见图3),采用广角镜头,设定摄影参数见表1。

图3 Gopro HERO4摄像机
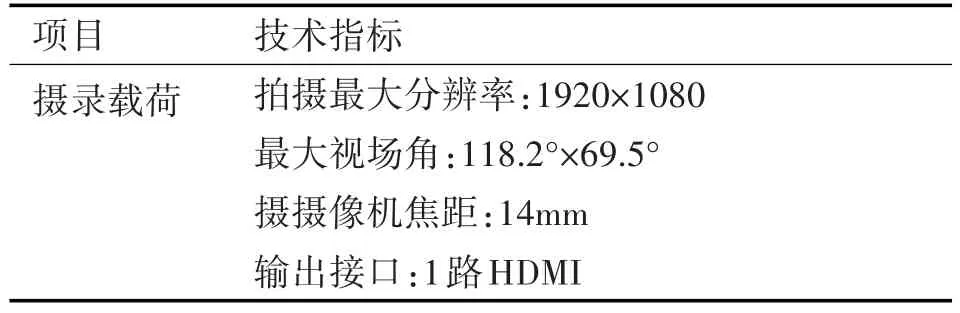
表1 GoproHERO4摄像机参数表
在实验室中,使用Gopro HERO4摄像机从不同角度拍摄标定板,得到标定分析所用的一组图像(见图4,共计24张),按照标定方法进行分析计算,得到摄像机内参数和畸变系数(见表2)。
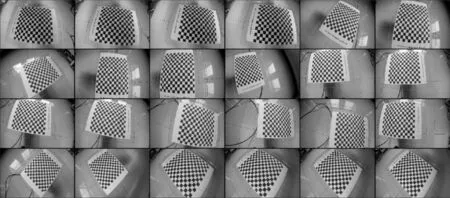
图4 Gopro HERO4拍摄的标定板图像
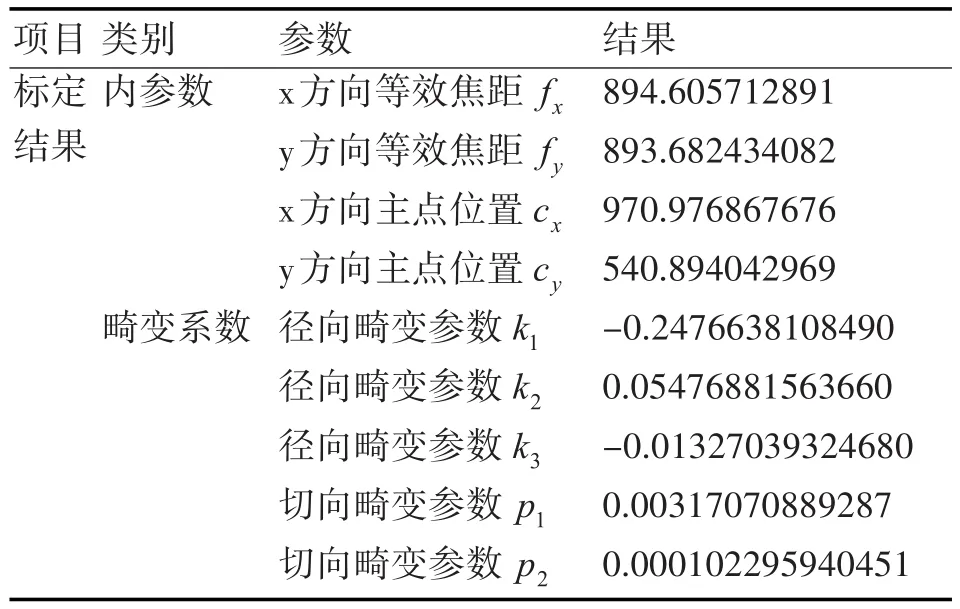
表2 Gopro HERO4摄像机标定结果
标定出的摄像机内参数如表2所示,x方向等效焦距fx与y方向等效焦距fy非常接近;理论上主点位置应为图像中心(960,540),计算出的x方向主点位置cx,偏离约11个像素,y方向主点位置cy,偏离约1个像素。图5标定图像的重映射误差畸变影像处理效果分析表示每副标定图像的重映射误差,体现了标定结果的内符合精度,误差越低表示模型精度越好,本次标定结果的平均映射误差0.65像素,说明精度较高。
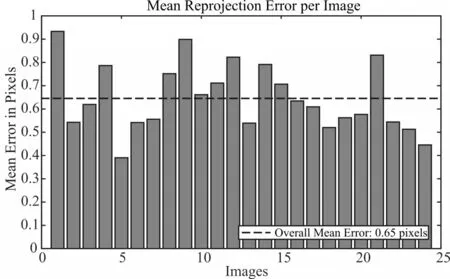
图5 标定图像的重映射误差畸变影像处理效果分析
4.2 畸变图像矫正
通过相机标定得到的内参矩阵和畸变系数,利用 OpenCV 提供的 cvUndistort2()函数[11~12],可得到矫正后的图像,如下图6(a)~(d)所示。由第一组两幅图中可以看出,原畸变图像中的地砖线、标定玻璃板边沿、暖气下边缘,在矫正后的图像中得到了很好的修正。在第二组两幅图像中,实验室的转动平台、窗户、以及桁架导轨的形变都得到了很好的修正。
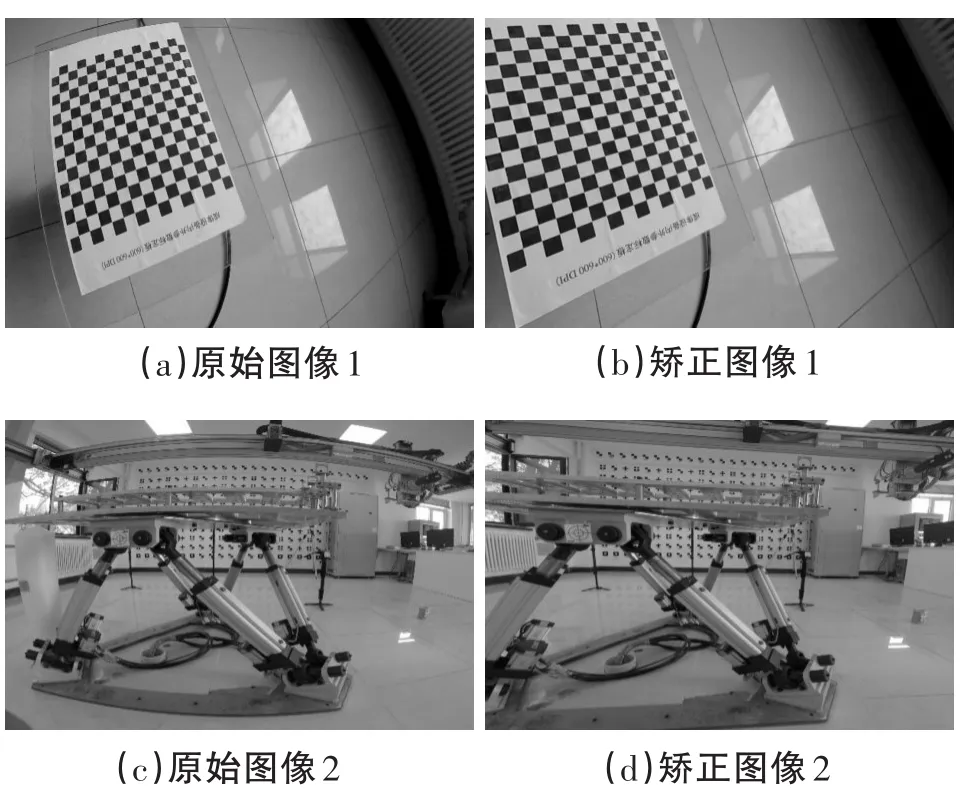
图6 矫正后的图像
5 结语
利用摄像机标定技术,解算出广角摄像机内参数和畸变系数,对广角摄像机畸变图像进行了修正,有效解决了广角摄像机镜头带来的图像几何畸变,恢复了图像正常比例,为后续正常图像处理与分析提供了可能。本文中的相机标定算法与图像矫正算法,在实验室条件下对多种广角单反相机做过相关实验,具有一定的通用性。
参考文献
[1]赵清杰,钱芳,蔡利栋.计算机视觉[M].北京:机械工业出版社,2005(3):312-316.
[2]于起峰,尚洋.摄像测量学原理与应用研究[M].北京:科学出版社,2009.
[3]张静,朱大勇,张志勇.摄像机镜头畸变的一种非量测校正方法[J].光学学报,2008,28(8):1552-1557.
[4]吴德烽,陈天飞,徐轶群等.船舶机舱视觉监测系统畸变图像校正方法[J].中国航海,2012,35(4):41-44,118.
[5]马广彬,章文毅,陈甫.图像几何畸变精校正研究[J].计算机工程与应用,2007,43(9):45-48.
[6]廖士中,高培英,苏艺等.一种光学镜头摄像机图像几何畸变的修正方法[J].中国图象图形学报,2000,5(7):593-596.
[7]英向华,胡占义.一种基于球面透视投影约束的鱼眼镜头 校 正 方 法[J].计 算 机 学 报 ,2003,26(12):1702-1708.
[8]徐芳,刘晶红.航空大视角镜头畸变校正技术[J].计算机应用,2013,33(09):2623-2626,2630.
[9]Z.Zhang.A Flexible New Technique for Camera Calibra⁃tion[J].IEEE Trans.Pattern Analysis and Machine Intelli⁃gence,2000,22(11),1330-1334.
[10]Z.Zhang,Camera Calibration with One-Dimensional Objects[C]//Proc.European Conf.Computer Vision,2002,4:161-174.
[11]于仕琪,刘瑞祯译.学习OpenCV[M].北京:清华大学出版社,2009.
[12]梅迎春,王朝立,廖勤武.基于OpenCV的摄像机标定的应用研究[J].计算机工程与设计,2009,30(16):3856-3858,3862.
猜你喜欢
沈阳建筑大学学报(自然科学版)(2022年4期)2022-11-15
实验室研究与探索(2022年7期)2022-10-26
金属热处理(2022年3期)2022-04-09
城市公共交通(2022年1期)2022-04-07
城市公共交通(2022年2期)2022-04-07
摄影与摄像(2021年12期)2021-10-01
照相机(2020年9期)2020-10-28
影像视觉(2020年5期)2020-06-30
都市生活(2019年5期)2019-08-01
支点(2016年11期)2016-12-22