基于DeltaOS的测量定位雷达对动目标处理和显示研究∗
2018-05-29 11:50黄晓燕
舰船电子工程 2018年5期
刘 铎 黄晓燕
(1.中国电子科技集团第二十研究所 西安 710068)(2.西安石油大学 西安 710072)
1 引言
雷达系统是一种具有强实时性应用的系统。随着计算机和嵌入式技术的迅速发展,现通常采用Vxworks嵌入式操作系统来满足其可靠性和实时性需求[1]。为了国家武器装备的安全性,可靠性的考虑,国产化处理器和国产化操作系统的开发的需求越来越受重视,国产操作系统陆续推出,其中道系统(DeltaOS)便是其中的代表。
道系统(DeltaOS)是目前中国依靠自己技术和力量,自主研发的实时操作系统之一,龙芯3A是新一代的64位多核高性能通用处理器。处理器采用RISC架构,兼容MIPS指令,原生四核设计,基于龙芯3A处理器在DeltaOS操作系统被大量的运用于军工武器装备领域。本文主要研究基于龙芯3A处理器在DeltaOS操作系统下DeltaGUI图形库的开发和实时任务调度机制的研究,同时采用运动目标跟踪算法和动目标轨迹外推算法,实时进行任务调度计算,并对动目标的动态势图进行显示[2]。
2 DeltaGUI设计架构
DeltaOS操作系统支持抢占式多任务、任务的优先级调度、时间片轮转、任务的优先级继承等特点,DeltaGUI是为嵌入式系统提供图形用户界面的支撑软件,是扩展操作系统人机交互功能的一个模块[3]。DeltaGUI位于操作系统核心之上,如果要用它来构建一个实时任务系统,必须将它与实时操作系统内核集成。DeltaGUI以库的形式为应用提供各种工具和组件来实现图形界面[4]。
DeltaGUI图形库与外围系统的组成关系原理如图1所示。
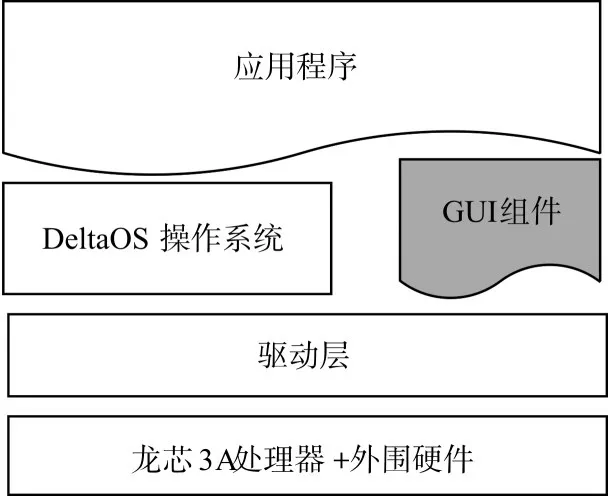
图1 GUI体系架构组成框图
DeltaGUI与外围相接,以类库的形式向应用程序提供编程接口,通过操作系统抽象层与具体实时操作系统联系,而硬件抽象层使DeltaGUI无需直接和硬件交涉就能轻易挂接各种输入、输出设备[5];DeltaGUI通过消息来进行对象与对象间的通信与协作,采用数据结构DMessage来表示消息。该数据结构中的各个域分别表示了消息的类型、发送者、接收者以及消息所包含的其他信息等;DeltaGUI不断调用消息队列提供的各种函数对所有消息进行有序的处理。用户也可以自己调用消息队列的入队函数把创建的消息加入到消息队列中供DeltaGUI的对象处理[6]。
3 显示图形系统设计与实现
基于龙芯3A处理器,采用GUI组件的显示,主要包括,其主要实现对设备的工作控制、分设备状态监视显示、节点信息态势,目标特点等基本功能显示。系统设计包括了显示模块、控制模块以、接口模块、网络接收模块和GPS接收模块5部,系统采用了嵌入式实时操作系统DeltaOS,开发调试在lamdaPRo下进行,显示图形系统组成框图如2所示。
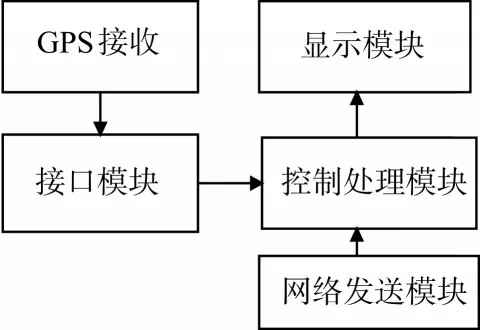
图2 显示图形系统组成框图
GPS接收模块,主要为基准测量目标信号提供经度、纬度,高度和时间信息,以及保证设备运转的秒信号。
接口模块收到GPS信号后,通过PCI总线将收到的数据转发给控制模块。
网络发送模块,通过组播发送模式,将外部输入导航信息,作战信息发送控制模块。
控制模块,将接收到信息,进行分批处理,提取不同类型目标节点信息进行数据处理。
显示模块,根据不同的信息,通过任务优先级的,进行任务调度。
显示软件包括动目标轨迹的动态势图、被测量目标的实时距离和方位的显示等信息,以及控制操控显示。
4 运动目标跟踪算法
测量定位雷达是通过两部雷达之间按时隙周期进行接收和发射互测量原理,对被测目标的位置和方位进行精确定位,由于对测量精度的要求,需要进行实时预估,对测量得到的异常数据或误差较大数据需要采用滤波算法进行处理。
α-β-γ滤波最常用的目标运动模型是匀加速运动模型[7],在该模型中,目标做匀加速直线运动,方程如下:
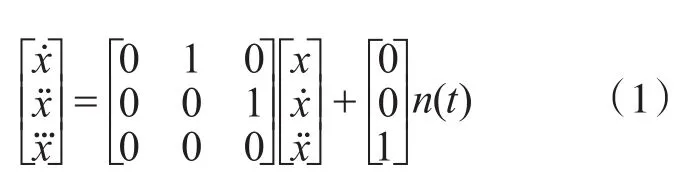
式中:x、ẋ、ẍ分别是运动目标的位置、速度分量和加速度分量;n(t)是均值为零的高斯白噪声。
α-β-γ滤波是运动方程为匀加速的卡尔曼滤波的稳态解形式,运动目标中包含位置、速度和加速度,运动目标的状态方程为

其中,状态转移矩阵为:过程噪声分布矩阵为为零均值高斯白噪声。量测方程为


新信息为

其中,增益
5 动目标轨迹外推算法
为满足舰船运动目标状态的更新频率的需求,还需要对目标进行航迹平滑外推。测量过程汇总目标的运动状态信息一般以秒级速度发布,若以接收到的信息频率显示会存在跳变现象,因此需要更短的时间更新目标运动状态就需要对接收到的目标状态信息和目标当前状态信息对目标未来的运动状态进行推算。
正常情况下运动目标从当前位置,经过时间Δt后能够由预测推算位置
已知时刻t0目标的位置S0(x0,y0,z0),航向角φ0,俯仰角φ0,速度V0(vx0,vy0,vz0),经过时间 Δt后得到t1时刻目标的位置为
进而根据t1时刻的信息可推算得到t2时刻的位置为
目标从运动到点的速度为
其中,,则目标在的推算航向角为

目标从运动到点的航向转向角速度为

目标在的推算俯仰角为
目标从运动到点的俯仰角转向角速度为

6 现场实测实验
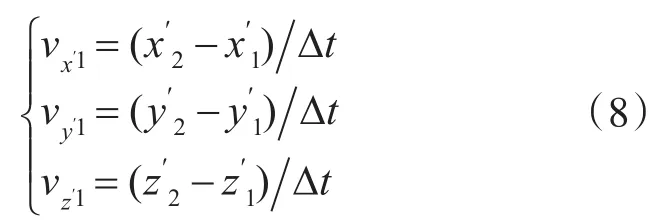
根据现场实验测量,第20个节点舰船为基准节点,称为测量节点,采用α-β-γ滤波算法,对1~19个舰船进行测量,即被测节点,运动被测目标舰船做圆周匀速运动,初始距离分布在2km~20m之间,初始速度在20kn~40kn之间匀速运动,被测节点实时测量态势图如图3~5所示。图3表示为初始状态下,被测目标未经过滤波处理,真实位置与预估目标位置存在较大的误差;经过一定时间运动后,被测目标与外推值位置无限接近,如图4所示,当经过较长时间稳定运动后,真实动目标位置与预估外推位置重合,如图5所示,1~19被测节点实时测量值与外推值误差值,图6所示。
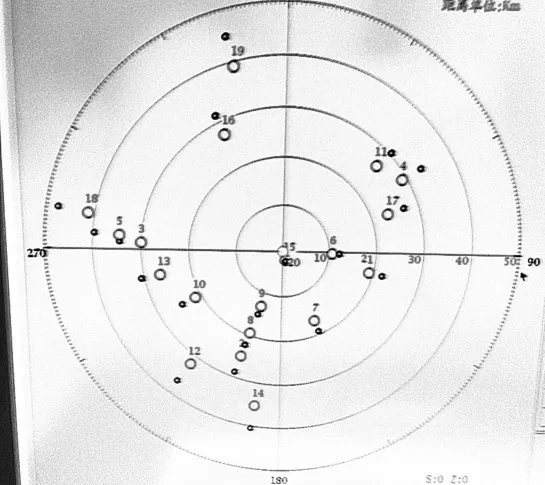
图3 动目标初始运动位置
图4 动目标运动中
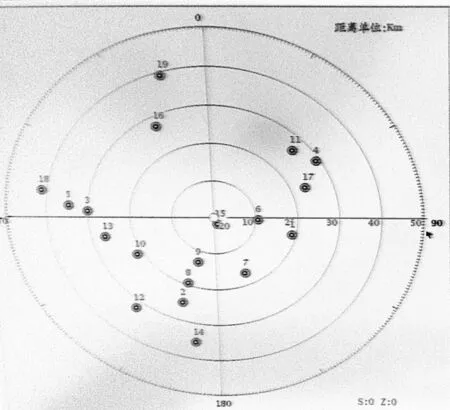
图5 动目标运动稳定
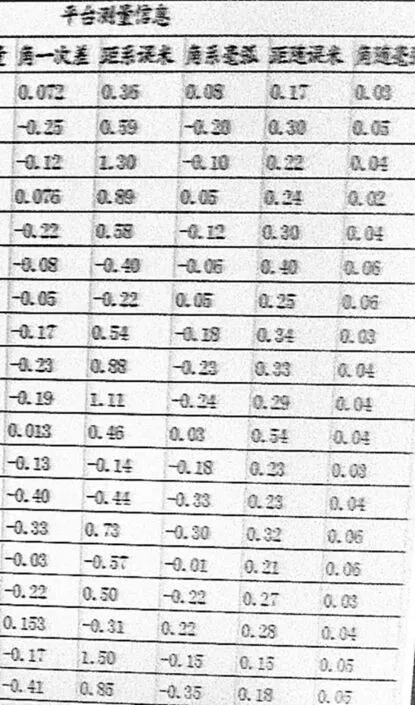
图6 动目标与外推值误差
7 结语
由上述试验结果表明,采用α-β-γ滤波算法可以有效地对干扰进行剔除,通过外推算法可以精确地预估目标的运动轨迹,从而提高测量定位雷达的测量与定位精度,运用国产龙芯3A-1000处理器下的道系统(DeltaOS)开发,可以保证雷达的实时性和精度指标要求,提高了雷达的保密安全性,在军队武器装备具有很大的推广应用意义。
参考文献
[1]丁鹭飞,耿富录,陈建春.雷达原理[M].西安:电子工业出版社,2010.
[2]道系统使用手册[M].北京科银京成技术有限公司,2017.
[3]航空电子应用软件接口要求[M].中国人民解放军总装备部,2015.
[4]邓中亮,段大高,崔岩松.嵌入式系统设计[M].北京:北京邮电大学出版社,2008.
[5]郭兵,熊光泽,陈丽蓉,蔡建平.嵌入式应用软环境Del⁃taOS/Lamtool的设计与实现[C]//第十届全国抗恶劣环境计算机学术年会,2001:28-31.
[6]李阳,曹万华.基于DeltaGUI的双屏显示技术研究[J].舰船电子工程,2004,24(6):82-84.
[7]朱瑞丰,张军.基于修正α-β-γ滤波的多目标跟踪算法研究[J].天津职业技术师范大学学报,2013.9,23(3):12-14
[8]张萍萍,孙永侃,张莉,林宗祥.舰船科学技术.视景仿真中运动目标的航迹平滑外推算法[J].2013.4,35(4):49-53.
[9]陈亮,吴小俊.基于常增益组合滤波器的目标跟踪算法[J].计算机应用与软件,2009(7):16-17.
[10]韩宏亮.基于IMM的雷达目标跟踪算法研[D].南京:南京信息工程大学,2011.
[11]何友.雷达数据处理及应用[M].第二版,北京:电子工业出版社,2009.
[12]王继森.船舶航迹智能控制系统研究[D].哈尔滨:哈尔滨工程大学,2008.
猜你喜欢
家庭影院技术(2021年6期)2021-07-28
北京航空航天大学学报(2019年9期)2019-10-26
电子制作(2019年15期)2019-08-27
航天电子对抗(2019年4期)2019-06-02
电子制作(2019年9期)2019-05-30
小学生学习指导(低年级)(2018年12期)2018-12-29
科技视界(2018年3期)2018-04-02
小学生导刊(高年级)(2016年11期)2016-11-14
微型计算机(2009年17期)2009-05-19
西安交通大学学报(2009年12期)2009-02-08