基于杂波背景分割二维恒虚警检测算法研究
2018-05-28 22:09张成峰黄晓静张长亮
中国电子科学研究院学报 2018年2期
张成峰,黄晓静,张长亮
(中国电波传播研究所青岛分所,山东 青岛 266107)
0 引 言
杂波对雷达检测性能的影响一直是雷达设计中不可回避的重要问题。特别是地波雷达和天地波雷达,强烈的海杂波和电离层杂波严重影响目标检测和识别[1]。
如何建立杂波模型,提高检测性能,国内外学者开展了大量的研究工作,相继提出了基于Rayleigh分布,Weibull分布[2]以及K分布[3-4]杂波背景下的恒虚警检测方法。然而实际中杂波的来源随着雷达波束的扫描而快速变化,不仅分布类型未知,而且分布参数也是快速变化的。由于最佳检测器只能在特定分布的杂波背景中达到最佳效果,杂波特性的不确定性使得设计理论上的最佳检测器很难达到预期效果[5]。
本文在对检测背景中杂波和噪声的特性进行统计的的基础上,提出了一种二维恒虚警检测方法。该方法先对检测背景进行杂波背景分割,再根据检测单元在杂波分割区域的位置选择不同的检测器,然后分别在距离维和多普勒为进行目标检测。实测数据的处理结果表明了本方法的有效性和实用性。
1 基于杂波背景分割二维恒虚警检测
1.1 杂波背景分割
雷达采用脉冲压缩、相干积累以及波束形成等信号处理方法得到特定波束内的距离-多普勒信息构成的Range-Doppler(RD)图,如图1所示,该图由实际天地波雷达数据生成。由图可以看到海杂波、直达波、电离层杂波以及目标回波(目标由先验知识确定)。海杂波、直达波以及电离层杂波能量都比较强,在这种较强的非均匀杂波背景下,传统CFAR检测器将面临着严重的性能恶化,尤其是杂波边缘区域[6-8]。

图1 实测数据RD图
根据功率水平高低,将RD图分割为三个区域:底噪区域、弱杂波区域与强杂波区域。其分割步骤如下:
(1)统计底噪功率,乘以经验系数作为检测门限,超过门限判为杂波区域,低于门限判为底噪区域。
(2)经过步骤(1)后,底噪区域上会存在一些离散噪声,经过连通域去噪算法,去除离散的噪点。
(3)经过步骤(1)(2)后,由于杂波区域会出现低于门限的值,因此会产生一些“空洞”。经过低通滤波思想,对杂波覆盖区内的“空洞”进行能量平滑,将“空洞”填充[9]。经过上述步骤,可分离底噪区域和杂波区域。
(4)同理,在底噪区域外重复步骤(1)、(2)、(3)即可分离弱杂波区域和强杂波区域。
图2为经杂波背景分割处理后的RD图。可以看到底噪区域、弱杂波区域与强杂波区域与图功率水平分布基本吻合。
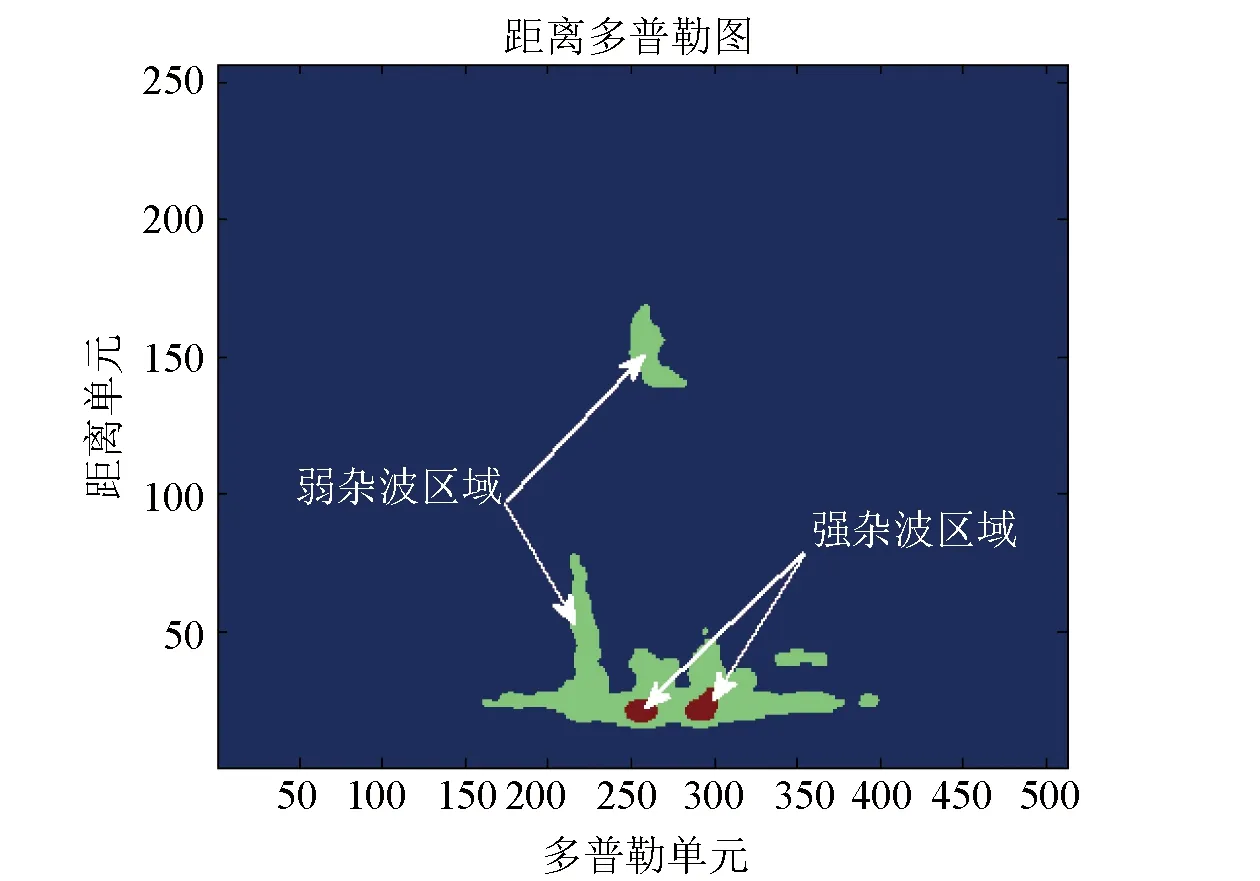
图2 经杂波背景分割后的RD图
1.2 二维检测结构
基于杂波分割检测器原理如图3所示,由杂波背景分割结果确定杂波边缘位置,根据检测单元在杂波分割区域的位置,选择不同的检测器和参考单元进行目标检测。图中D为检测单元;X=[x1,x2,…,xN]为参考单元;S为检测器选择开关,根据检测单元与参考单元在杂波分割图中的位置确定检测器类型;Z为参考样本功率的估计;T为标称化因子,与参数无关。

图3 基于杂波分割检测原理框图
1.2.1 检测器
本文选用的几种CFAR检测方法分别为单元平均(CA-CFAR) 、单元平均选小(SO-CFAR)、单元平均选大(GO-CFAR)、排序统计(OS-CFAR)。
(a)CA-CFAR是最常用的CFAR方法之一,它在均匀杂波背景下的检测性能良好,但是在杂波边缘和多目标环境下缺乏鲁棒性。
(b)SO-CFAR可以克服CA-CFAR中的一个缺陷,即多目标环境中能分辨出主目标,减少CFAR损失[6]。SO-CFAR适用于非杂波或弱杂波区环境,在干扰目标位于前沿或后沿滑窗之一的多目标环境中,SO-CFAR有助于分辨出主目标。特别是在低功率杂波占据着大部分,参考滑窗且检测单元位于低功率杂波区域的情况。如图4所示,此时选用SO-CFAR能够较好地对抗杂波边缘。

图4 高、低功率杂波分布情况1
(c)GO-CFAR可以克服CA-CFAR的另一个缺陷,即杂波边缘环境中要引起虚警率的上升[7]。GO-CFAR在杂波边缘环境中能保持较好的控制虚警性能。特别是在高功率杂波占据着大部分,参考滑窗且检测单元位于高功率杂波区域情况。如图5所示,此时选用GO-CFAR能够较好地对抗杂波边缘。

图5 高、低功率杂波分布情况2
(d)OS-CFAR将参考采样进行由小到大的排序,选取第k个值作为杂波功率水平估计,由于OS处理只保留了一个有序参考采样,导致CFAR损失比CA-CFAR类高,但有序统计恒虚警率处理法对杂波边缘和遮蔽效应呈现出较好适应性[8]。
本文按以下规则选择检测器:当检测单元在低功率杂波区域,部分参考单元在高功率杂波区域时,采用SO-CFAR检测器;当检测单元在高功率杂波区域,部分参考单元在低功率杂波区域时,采用GO-CFAR检测器;其他情况,采用适应性较强的OS-CFAR检测器[10]。
1.2.2 检测窗
由于杂波噪声背景在多普勒和距离方向上的统计特性是不同的,而且目标在距离域和多普勒域的相关性也不是很强。因此,本文二维参考单元结构将采用十字形窗,分别在不同维上进行独立的一维检测,检测信号只有同时在距离维和多普勒维都超过各自的判决门限,才会被认为是目标回波。同时根据目标相邻点的相关性在多普勒维上很强而在距离维上较弱的特点,因此在多普勒方向选取的保护单元较距离方向上要多。参考单元检测窗结构如图6所示。

图6 十字型检测窗
1.3 检测流程
根据以上讨论,下面给出基于背景分割二维恒虚警检测算法流程:
(1)根据1.1章节步骤进行杂波背景分割。
(2)在多普勒维根据检测单元在杂波分割区域的位置选择合适的检测器,统计功率水平,与检测阈值进行比较。
(3)在距离维重复步骤(2)。
(4)若多普勒维和距离维都超过各自的检测阈值时判为目标存在,其他情况判为目标不存在。
2 实测数据的处理分析
文中分析数据来至天地波雷达试验。不经过杂波背景分割直接利用OS-CFAR算法对图1进行检测,检测结果如图7所示。由图可见,共检测出8个点。其中,点1为真实目标点;点2、3为直达波形成的虚警点;点4、5、6为海杂波形成的虚警点;点7为杂波边缘形成的虚警点;点8为底噪区域形成的虚警点。
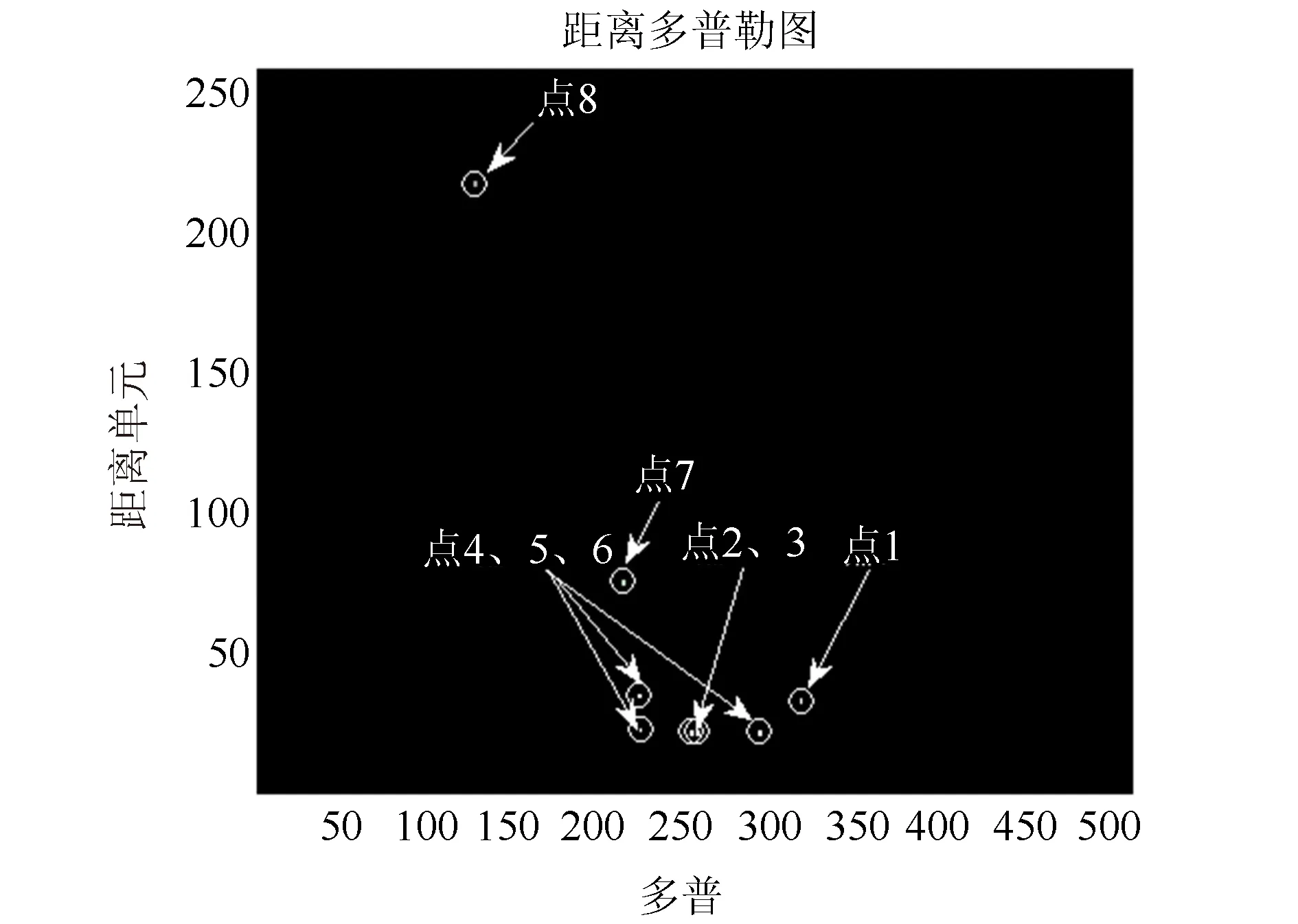
图7 未经过杂波分割的检测结果
经过杂波背景分割后再对相同数据进行检测,检测结果如图8所示。由图可见,共检测出4个点。对比图7可知,在保留真实目标点1的基础上消除了直达波形成的虚警点2、3,海杂波形成的虚警点6以及杂波边缘形成的虚警点7,有效降低了虚警点。

图8 经过杂波分割的检测结果
图9为未经过杂波背景分割40个周期的检测结果(将40个周期的检测结果进行叠加),由图可以看到除了目标航迹外,还有许多虚警点。包括强一阶Bragg峰形成的虚警点、直达波形成的虚警点、电离层杂波形成的虚警点。

图9 未经过杂波分割40个周期检测结果
图10为经过杂波背景分割后40个周期的检测结果,对比图9可知,在保留航迹的基础上有效降低了虚警点,尤其是杂波边缘区域。

图10 经过杂波分割40个周期检测结果
3 结 语
本文在对回波信号统计分析的基础上,提出了一种二维恒虚警检测方法。该方法先对RD图进行杂波背景分割,再根据检测单元在杂波分割区域的位置选择不同的检测器,分别在距离维和多普勒为进行目标检测。实测数据的处理结果表明了本方法有较强的有效性和稳健性。当然,实际中可能存在更为复杂的情况,这有待于作进一步研究。
:
[1] 何友,关键,彭应宁等.雷达自动检测与恒虚警处理[M].北京,清华大学出版社,1999.
[2] 孟祥伟.韦布尔杂波下非参数量化秩检测器的性能[J],电子学报 ,2009,37(9),2030-2034.
[3] WattsS.Radar.Detection.Prediction.inK-Distributed Sea Clutter and Thermal Noise,IEEE Transactions on Aerospace and Electronic Systems,1987,23(1):40-45.
[4] Oliver CJ,Correlated K-distributed Clutter Models,Journal of Modern Optics,1985,32(12):1515-1547.
[5] 尚秀芹,宋红军等.非均匀环境中的分布目标自适应检测[J].电子与信息学报,2011,33(3):696-700.
[6] 黄晓静.高频天地波雷达目标信息获取方法[J]. 电脑知识与技术, 2013, 9(16):351-356.
[7] 童健,文必洋,王颂.强海杂波背景下的舰船目标检测[J]. 武汉大学学报(自然科学版), 2005, 51(3):370-374
[8] 陈建军,黄孟俊等.海杂波下的双门限横虚警目标检测新方法[J]. 电子学报, 2011, 39(9):2135-2140.
[9] 李雪, 冯静, 邓维波, 焦培南. 返回散射电离图智能判读[J]. 电波科学学报, 2010, 25(3):534-537.
[10] 张麟兮,许家栋等.雷达横虚警检测系统仿真[J].计算机仿真,2007,24(4):293-296.
猜你喜欢
中国临床医学影像杂志(2022年5期)2022-07-26
科学与信息化(2021年30期)2021-12-24
北京航空航天大学学报(2021年9期)2021-11-02
雷达与对抗(2020年2期)2020-12-25
火控雷达技术(2020年2期)2020-10-16
医学新知(2019年4期)2020-01-02
火力与指挥控制(2018年10期)2018-11-13
中国交通信息化(2017年9期)2017-06-06
电子制作(2017年10期)2017-04-18
中国继续医学教育(2015年5期)2016-01-07