擦窗机悬吊工作平台回转装置研究及分析
2018-05-24 08:22谢丹蕾李玉杰王春琢
建筑机械化 2018年2期
谢丹蕾,李玉杰,王春琢
(1.西安建筑科技大学,陕西 西安 710055;2.中国建筑科学研究院 建筑机械化研究分院,河北 廊坊 065000)
近年来,建筑业的蓬勃发展激发了建筑设计师的创作热情和灵感,愈来愈多的异型建筑拔地而起。相比于传统建筑造型,异型建筑往往更加灵动,为城市增添了更多新的景观,同时,如何保持其美观、清洁等维护工作,及安装施工等一系列相关工作的产生,则给擦窗机行业提出了更高的要求。为了满足异型建筑凹立面幕墙施工和清洗保养的要求,各种结构形式的擦窗机及附属产品应运而生。本文介绍的就是一种用于双臂动臂变幅式擦窗机上的经济适用型工作平台回转装置。
1 工作平台回转装置的工作原理
双臂动臂变幅形式是一种紧凑型擦窗机设备(图1),整机重量较轻,多用于一些工作空间有限、屋顶承载力小的建筑物。擦窗机悬吊工作平台(以下简称工作平台)是擦窗机为施工作业人员提供接近建筑物外立面、拐角等作业地点的装置。对于异型凹立面建筑,为使工作平台到达理想位置,则需借助特殊机构来实现。常规采用的伸展吊船或伸展架装置,存在外形尺寸较大、自重较重的缺点,不宜配置在小型设备上使用。因此,需设计一种灵活、轻便、易操作的装置,与此种小型设备配套使用。
考虑到经济性和适用性,该装置设计为手动控制机构,操作人员站在工作平台内就能轻松实现回转作业。

图1 双臂动臂变幅式擦窗机
其工作示意图如图2所示,回转机构的操作原理是手动转动手轮,通过轴,带动小齿轮与大齿轮相对运动,转动梁随之转动,与此同时,与转动梁连接的悬挂工作平台进行回转,从而达到回转工作平台的目的。传统的制动方式是利用大齿轮上的紧定螺钉进行制动,需要制动时拧紧螺钉,使大齿轮和转动梁不会发生相对转动,进而实现制动目的。此种制动方法较为简单易操作,但也存在一定弊端,即无法实现及时制动的效果,可靠性较差。针对出现的问题,改进了机构的制动方式,增加了2个止动盘,分别连接到连接梁和转动梁上。止动盘上分布了若干个定位孔,配合止动销使用。如图3所示,在设计止动盘的定位孔时,可以根据实际工况,灵活预设工作角度,使得工作平台能在轻松的回转到需要的角度后,快捷、有效地制动,然后平稳、安全地进行下一步清洗或维护工作。此种制动方式的采用,更加提升了工作时的安全性和可靠性。

图2 擦窗机悬吊工作平台回转的机构及工作示意图
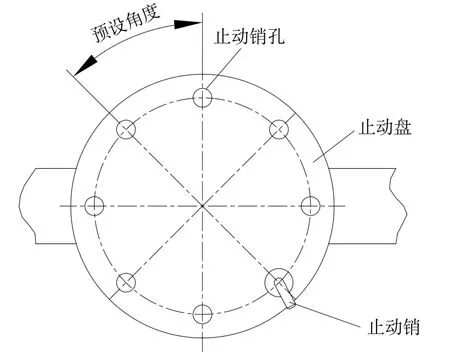
图3 制动型式示意图
2 工作平台回转装置的计算分析
2.1 滚动轴承的选择
根据受力情况试选轴承类型,计算出径向当量动载荷Pr、径向当量静载荷轴向当量动载荷Pa、轴向当量静载荷的值。分别带入轴承基本额定动载荷公式和额定静载荷公式中计算。
额定动载荷:
额定静载荷:
计算得到的值C和C0与试选轴承尺寸及性能表中所列的Cr(Ca)和C0r(C0a)分别进行比较,选取满足要求的轴承型号。
2.2 梁架的结构分析
利用ANSYS软件,对结构进行强度和刚度分析(图4~图5)。施加额定载荷后,得到等效应力最大值为103MPa,位于梁架中心处。变形最大处为5.1mm,位于梁架两端,与理论值基本一致,均符合安全要求。

图4 梁架的应力分析图

图5 梁架的应变分析图
3 结 语
该工作平台回转装置已在擦窗机工程项目中应用。从试验和现场使用效果看,基本能够满足实际工作要求。其小而轻的特点,减轻了对整机的负赘,在实际应用中,提升了整机的安全性和稳定性,是目前异型凹立面建筑用擦窗机的主要功能装置之一。
猜你喜欢
机械设计与制造(2022年10期)2022-10-12
哈尔滨轴承(2022年2期)2022-07-22
哈尔滨轴承(2022年1期)2022-05-23
哈尔滨轴承(2021年2期)2021-08-12
哈尔滨轴承(2021年1期)2021-07-21
科学技术创新(2020年32期)2020-11-05
消费导刊(2020年1期)2020-07-12
中国工程机械学报(2019年4期)2019-08-06
北京航空航天大学学报(2017年5期)2017-11-23
黄河之声(2016年24期)2016-02-03