V2G充放电站系统CAN总线通信协议的制定与实现
2018-05-23 01:45:36陈栋郝攀俞波
电气技术 2018年5期
陈 栋 郝 攀 俞 波
(1. 国网电力科学研究院,南京 210000;2. 东南大学电气学院,南京 210000)
随着智能电网与新能源的发展,电动汽车由于对环境的零排放日益受到政府与消费者的青睐。电动汽车接入电网 V2G[1],不仅可通过充电给车载电池能量补给,还可以作为储能单元通过放电将电池多余的能量回馈给电网,尤其是充放电设施与可再生能源有机集成后在微网中的应用更为突出[2]。
电动汽车充放电设施根据安装位置可分为车载式与非车载式。车载充放电机固定在汽车上,用于小功率慢速充放电。非车载充放电机安装在电动汽车外,能够快速直流大功率充放电。为了保证电动汽车充放电过程的安全、高效,V2G充放电站系统各部分之间需要进行信息交互,即需要通信协议[3]。目前,针对电动汽车充电,国家已发行相关标准,而车辆向电网馈能尚未出台标准。课题基于我国现行的充电标准 GB/T 20234-1[4]、GB/T 27930[5]、GB/T 18487[6],利用CAN总线设计适用于V2G充放电站系统放电通信协议,作为后期放电标准制定的前瞻性研究,以期实现车联网能量安全、有序的双向流动。
1 充放电站工作原理
1.1 充放电站结构
电网、充放电动机、电动汽车三者构成V2G充放电系统,如图1所示。充放电动机通过控制系统驱动AC/DC变换电路与双向DC/DC变换电路完成电动汽车与电网之间能量的传输[7]。设置两级变换电路的目的为实现电压宽范围输出,满足不同电压范围的电池的工况[8]。充放电动机通过通信监控管理控制单元根据电网调度系统发布的控制信号(电网允许充放电容量、充放电功率、切负荷量、分时电价等)和电池管理系统BMS(battery management system)发出的信号(电池组最低电池荷电量 SOC(state of charge)、可用时间、充放电电流限制、允许电压、电池温度等)经过充放电控制策略算法作用,得到充放电指令。充放电控制器接收BMS的需求指令与后台管理系统的控制指令,通过控制双向变换电路开关器件的通断,动态调整充放电动机的输出或输入电压、电流,实现电动汽车与电网之间能量的最优传输。
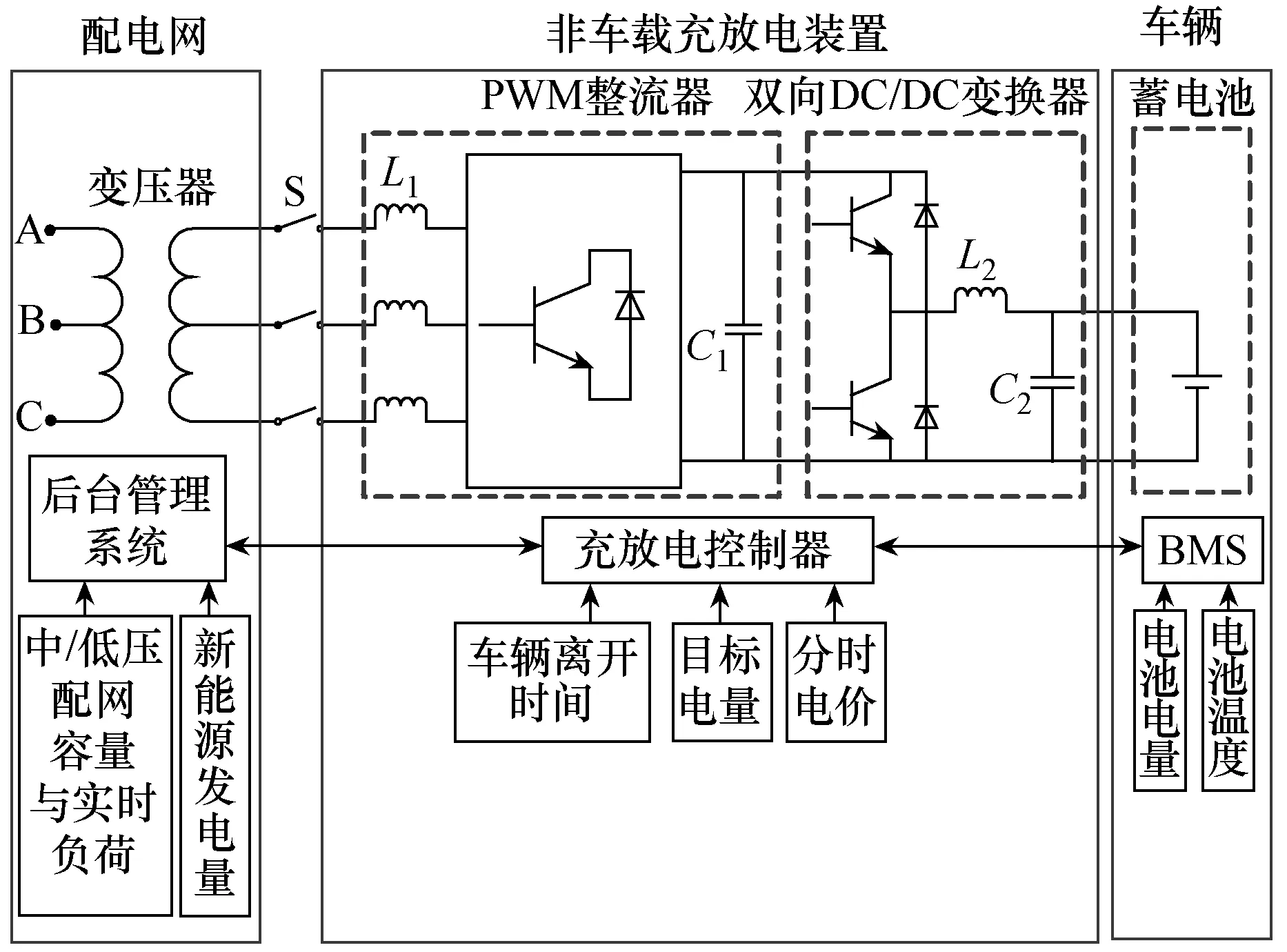
图1 充放电系统结构图
1.2 充放电站工作模式
电动汽车充电电能来自公共电网,而电动汽车放电可将电能供给公共电网、住宅用户电网、楼宇等不同对象。根据《电动汽车用充放电式电动机控制器技术条件》,车载储能装置可通过控制器向电网、负载、其他车载储能装置提供电能,可以工作在 V2G(车对电网)、V2H(车对家庭住宅)、V2B(车对楼宇)、V2V(车对车)和V2L(车对负载)等模式,可以定义V2X。
基于车辆用户多样化需求与成本优化,非车载充放电装置应具有充电模式和充放电模式两种运行方式。充电模式下,车辆提充电需求,充放电装置按指示完成充电任务。充放电模式下,充放电装置依据上级电网调度需求和电池状态,进行充放电转换和相应参数调整,改变能量传输方向,实现调峰、调频等任务。在接受电网调度命令或并离网切换时,电动汽车的响应速度可以达到毫秒级别。用户可以根据自身的偏好选择相应的模式。
2 V2G充放电站通信模式
V2G充放电站系统主要关键设备有能量管理系统、后台管理系统、电池管理系统。充放电动机需与电池管理系统通信获取电池实时参数,还应具备与后台监控管理系统通信获取电网运行参数。V2G充放电站各通信单元之间采用CAN总线实现信息交互。
2.1 CAN总线特点
CAN-bus(controller area network)即控制器局域网,是一种具有广泛应用的现场总线。CAN-bus是一种多主方式[9]的串行通信总线,位速率高,抗干扰能力好,检错能力强,具有出错后自动重发功能。CAN总线最高数据传输速率可达1Mbps,直接通信距离可达10km[10]。CAN总线由于具有这些优势,广泛应用在工业控制中。
2.2 充放电站的CAN通信
电动汽车充放电站通信网络应满足电动汽车电池管理系统、电动汽车充放电动机、充放电站后台管理系统三者之间的信息交互要求。充放电站各部分全部采用CAN技术进行组网时,充放电动机与蓄电池管理系统之间CAN网络,记为CAN1;充放电动机与后台管理系统之间采用独立的CAN网络,记为CAN2。
后台管理系统功能目标是实现电能质量监控和充放电动机各项数据及状态监控[11],并可依据电池需求和电网状况给充放电动机下达充放电指令。充放电动机与BMS之间的CAN通信网络采用点对点通信。后台管理系统与充放电动机之间的CAN通信网络采用主从控制,后台管理系统为主节点,充放电动机为从节点,如图2所示。
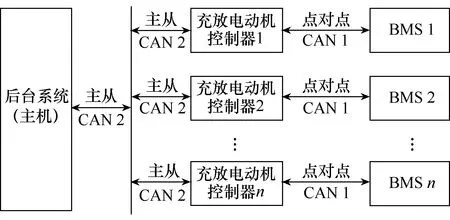
图2 充放电站CAN通信组网
3 充放电站CAN通信协议制定
CAN2.0规范已定义了OSI模型的数据链路层、物理层,因此不作深入介绍。主要针对V2G充放电站系统充放电交互报文,进行应用层设计,以期实现电动汽车充放电的可控化。充放电动机与 BMS之间通信采用点对点通信,充放电动机和BMS定义为不可配置地址,即该地址固定在电子控制单元ECU的程序代码中,无法变更。依据 GB/T 27930中规定,充放电动机分配地址为56H,BMS分配地址为 F4H。后台管理系统与充放电动机信息交互过程中,采用一对多CAN通信,并且为了区分不同充放电动机,应当分配不同的地址。充放电信息交互过程中,应用层采用参数和参数组定义的形式,各个节点根据参数组编号来识别数据包的内容。电动汽车充电部分通信协议可以参考GB/T 27930,下面针对电动汽车放电提出充放电过程中放电部分的通信协议内容。
如果选择充放电模式,装置根据用户在智能车载终端上选择的电动汽车动力电池剩余电量上下限值,将车辆可充放电的实时容量、受控时间等信息提供给后台管理系统,后台管理系统下发充放电控制指令,智能充放电动机根据车辆当前电池剩余电量进行充放电操作,实现能量的双向流动。
电动汽车放电过程可以划分为5个阶段,即物理连接、握手阶段、参数配置阶段、放电阶段和结束阶段。车主可以结合自身需求在充放电动机上进行放电模式选择,如定时放电,收益最大放电等。同时需检测车辆的车载控制器的软件是否支持放电,当检测到车辆兼容放电功能时,才允许将车载电池的电能回馈给电网。
1)物理连接。车辆接入电网前,用户通过刷卡就地认证或扫描二维码远端认证进行身份校验。为确保车桩之间可靠连接,双方需检测连接确认信号。然后,电子锁上锁,车辆处于不可行驶状态,起动放电过程。
2)握手阶段。充放电动机握手起动并发送握手报文,先判断放电兼容性和双方使用通信协议版本兼容性,再进行绝缘检测。绝缘检测通过则进入握手辨识阶段,双方发送辨识报文,辨识成功进入下一阶段。
3)参数配置。车辆与BMS交互各自参数要求,充放电动机向 BMS发送充放电动机最大输入能力报文,BMS向充放电动机提供最大允许放电电流、放电终止电压、允许放电时间段、最大允许放电电量等,BMS根据充放电动机最大输入能力判断是否能够进行放电。当双方均满足放电起动条件时,进行预充与放电参数初始化。
4)放电阶段。电网调度系统将电网实时功率需求指令以及电价信息通过后台管理系统下发给参与V2G的充放电动机。充放电动机根据电网需求和车辆自身的限制条件(电池电量、温度等),来调整电池放电电流以保证放电过程正常进行。放电过程中,充放电动机与车辆相互监测对方状态。电池状态异常或达到设定条件(放电时间、放电电量、放电金额等)以及收到充放电动机中止放电报文时,BMS将结束放电;充放电动机收到调度系统停止放电指令、出现异常或达到人为设定的放电参数值以及收到BMS中止放电报文时,将结束放电。
5)放电结束阶段。当充放电动机和BMS停止放电后,双方进行放电统计数据交互。BMS向充放电动机发送电池放电数据,如初始SOC、终止SOC、电池电压、电流、温度等参数;充放电动机向BMS发送整个放电过程中的放电电量、累计时间、放电收益等信息。
4 充放电站CAN通信协议实现
采用研华公司的CAN通信板卡PCIE-1680实现充放电CAN通信协议,使用两台PC分别模拟充放电动机节点与电池管理系统节点,搭建的硬件平台如图3所示。软件平台采用基于C++的跨平台开发库Qt,在VS开发环境下开发了一套放电通信控制软件,实现充放电各阶段的状态监测与时序控制。

图3 充放电硬件平台
基于充放电过程的不同阶段,采用模块化的友好型软件布局,以使放电控制时序更为清晰明了。为方便用户操作实现,设计了可视化窗口,可以直接在窗口设置充放电参数,模拟充放电动机与电池的各种工况。同时,对报文帧传输与解析的线程函数进行封装处理,便于后期调用与维护,程序文件框架如图4所示。电动汽车充放电通信由充放电动机控制器与BMS报文交互完成。图5为充放电动机通信控制器软件,可以读入设置的充放电动机参数,按照设计的放电通信协议,进行充放电通信。
开发的充放电通信控制软件不仅可以完成CAN帧的信息交互,而且能够监测与解析报文帧信息,并且能实现正常放电过程与异常放电的通信模拟。运行通信控制软件,抓取充放电动机在放电过程各阶段接收和发送报文:握手起动报文、配置报文、放电报文、放电结束报文、故障响应报文,表1为其中具有代表性的报文。报文帧采用29位标识符扩展帧格式,即帧ID以4字节装载。帧数据场的内容实时反映充放电动机的状态,并控制充放电电动机按设定条件进行放电和在故障状态下中止放电。开发的软件移植入充放电控制器,可用于完成放电部分可视化的时序控制。
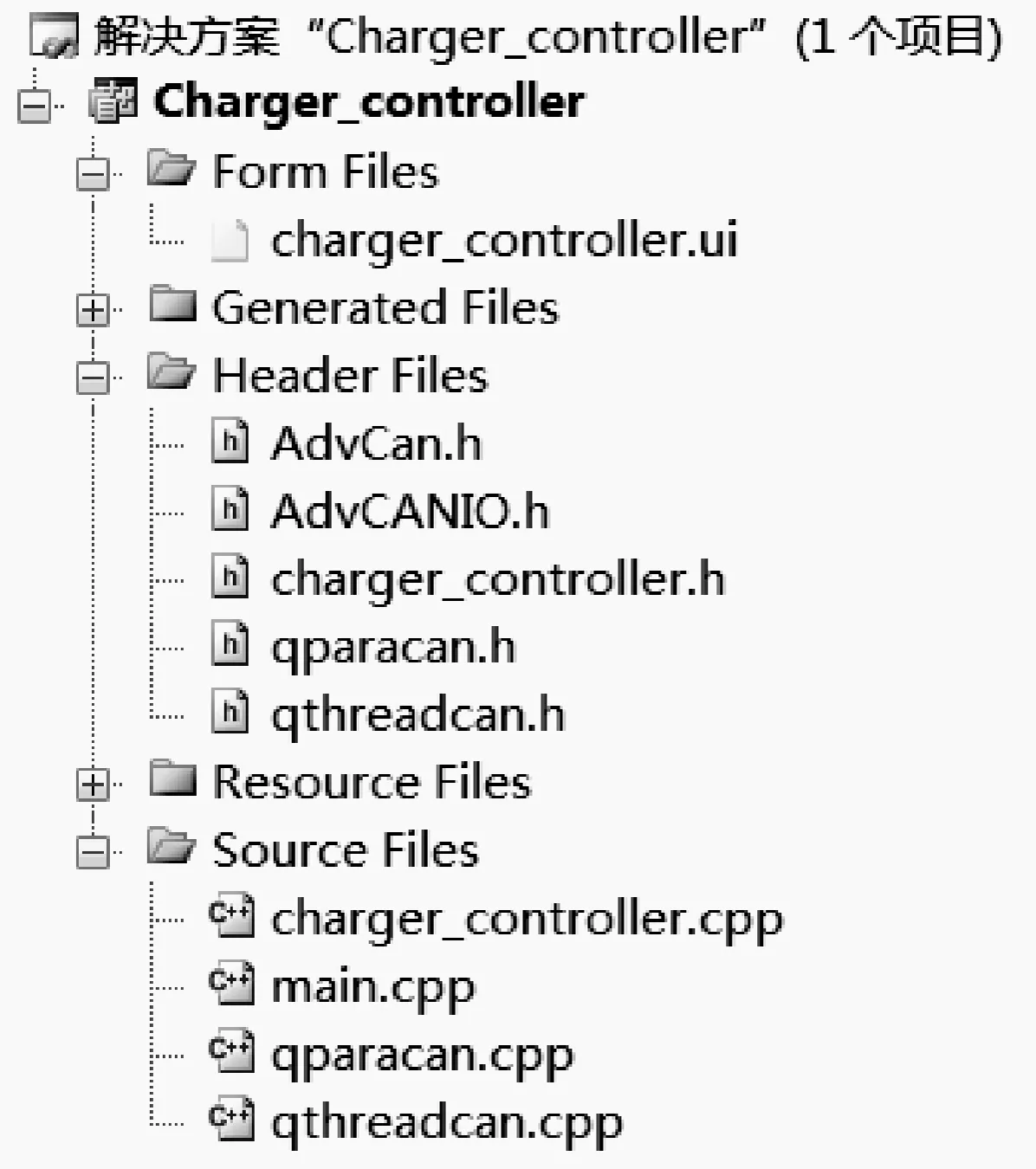
图4 程序代码框架
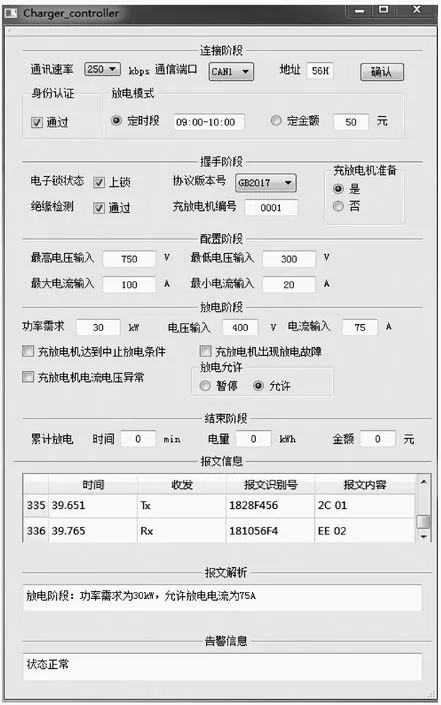
图5 充放电控制通信软件平台
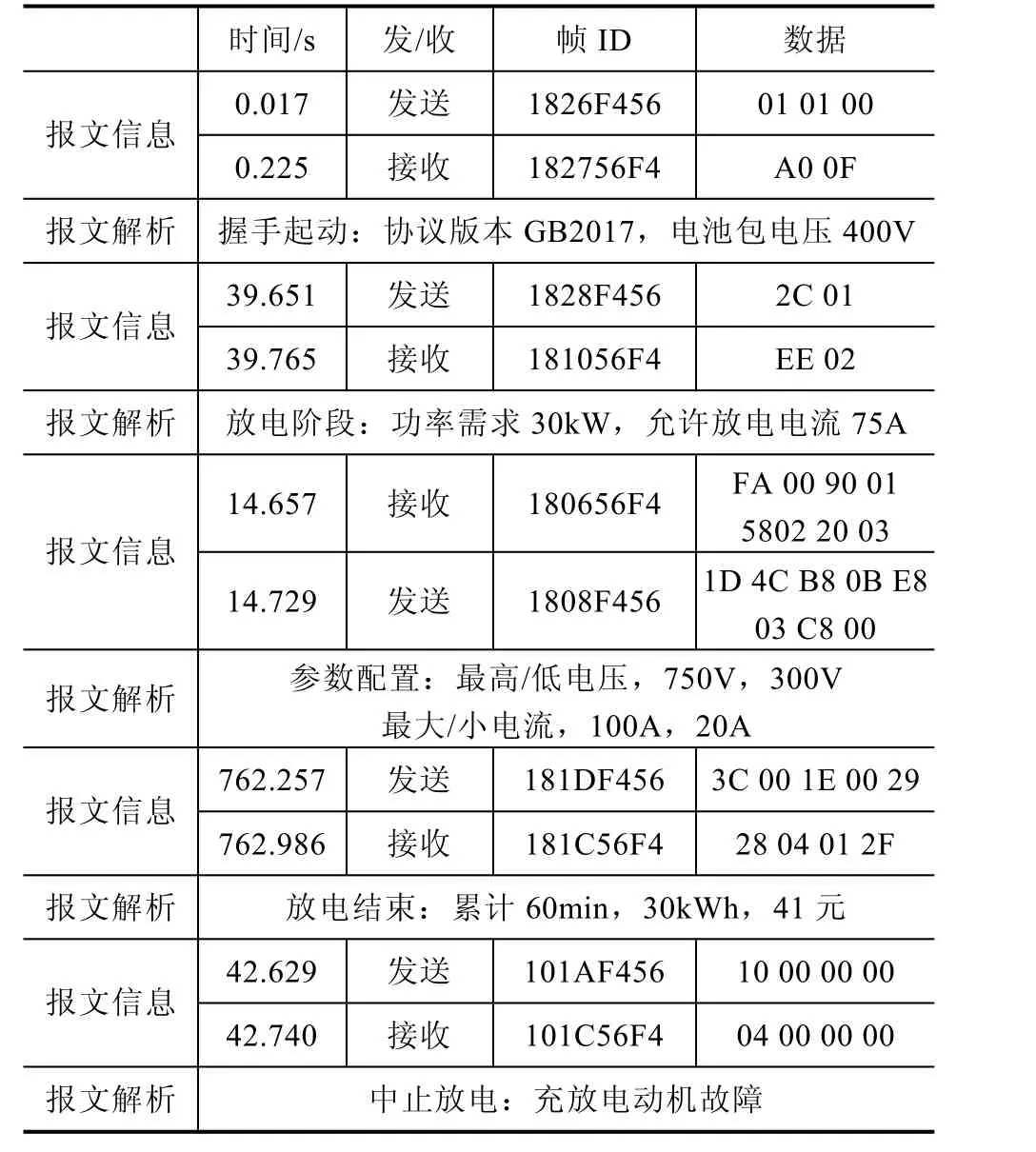
表1 放电通信报文
充放电过程各个阶段,通过以上形式的数据帧报文交互,实现参数传输与状态监测。控制器通过通信协议监测并控制充放电动机和车辆接触器状态与开闭,按照合理的时序完成充放电。
5 结论
随着电动汽车的大力推广,V2G概念也将逐步受到关注。充放电过程中电动汽车BMS与充放电动机的数字通信是能量安全、可靠传输的重要保障。本文在充电通信的基础上,拓展了放电控制通信,为今后充电通信协议升级成充放电通信协议提供参考。依据放电通信协议,开发相应的控制软件,模拟电动汽车在放电模式下正常与异常状况的 CAN通信和控制时序,实现车辆与电网信息互动,以期实现电动汽车充放电的可控化。同时开发的软件系统可以模拟充放电动机的不同工况,用于V2G通信系统的测试。充放电站通信协议的研究,可应用于智能电网的 V2G系统,实现电动汽车响应电网需求,为车主谋取利益,同时为电网的稳定、可靠运行提供保障,具有一定的工程应用价值。
参考文献
[1] Kempton W, Tomić J. Vehicle-to-grid power implementation: From stabilizing the grid to supporting large-scale renewable energy[J]. Journal of Power Sources, 2005, 144(1): 280-294.
[2] 肖湘宁, 陈征, 刘念. 可再生能源与电动汽车充放电设施在微电网中的集成模式与关键问题[J]. 电工技术学报, 2013, 28(2): 1-14.
[3] 吴诗宇, 史瑞祥. 非车载充电机与电池管理系统通信协议监测系统的研究[J]. 客车技术与研究,2015(4): 60-62.
[4] GB/T 20234.1—2015. 电动汽车传导充电用连接装置 第1部分: 通用要求[S].
[5] GB/T 18487.1—2015. 电动汽车传导充电系统 第1部分: 通用要求[S].
[6] GB/T 27930—2015. 电动汽车非车载传导式充电机与电池管理系统之间的通信协议[S].
[7] 裴晓泽. 大功率锂离子蓄电池充放电系统的研究[D].北京: 北京交通大学, 2008.
[8] 王大为, 徐洋波, 臧云峰, 等. 具有谐波抑制功能的充放电机的研究[J]. 电气技术, 2014, 15(12): 45-47, 51.
[9] 邓忠华, 陈秀峰. CAN总线在充放电机中的应用[J].自动化技术与应用, 2006, 25(10): 74-76, 83.
[10] 胥清华, 李强. CAN总线发展与其他总线的比较[J].电气技术, 2011, 12(7): 46-49.
[11] 崔保艳, 许建中. 双向充电桩的关键技术分析[J].电气技术, 2015, 16(10): 145-146.
猜你喜欢
新能源汽车供能技术(2021年1期)2021-10-14 08:59:48
电子制作(2019年23期)2019-02-23 13:21:36
成都信息工程大学学报(2017年5期)2018-01-23 02:45:38
读者·校园版(2018年3期)2018-01-18 08:12:52
风采童装(2016年2期)2016-08-02 09:18:38
广东石油化工学院学报(2016年6期)2016-05-17 05:17:26
电测与仪表(2016年2期)2016-04-12 00:24:52
电源技术(2015年5期)2015-08-22 11:18:02
电测与仪表(2014年17期)2014-04-04 11:57:00
铁路通信信号工程技术(2014年1期)2014-02-28 16:55:19