基于物联网的大型养殖水域监控系统
2018-05-21 07:45吴炳宏
时代农机 2018年2期
李 澥,吴炳宏
(广州大学华软软件学院,广东 广州 510900)
针对目前我国水产养殖规模越来越大,种类越来越丰富,传统养殖方式已不能满足现在的要求,目前国内养殖户在水质检测方面大多仍采用人工取样分析的方式,即时性差,耗时费力。随着物联网、云计算等先进信息技术的发展与应用,水产养殖信息化必将进入新的发展时代。针对以上问题,本研究拟开发一套基于物联网的大型水产养殖系统平台,实现对大型水域的水质检测、饲料投喂、数据分析等功能。
1 系统设计
(1)系统总体架构。系统集数据、图像实时采集、无线传输、智能处理和预测预警信息发布、辅助决策等功能于一体,功能可分为3部分:①具有自动巡航、定位及避障功能的无人驾驶机动船;于负责水质生态综合信息的获取分析以及养殖设备远程调控的终端设备;③由移动通信服务、远程操控、信息管理查询等构成的应用服务平台。如图1所示。
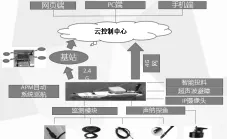
图1 系统总体架构图
(2)自动巡航及数据采集部分。采用APM2.8飞控系统结合PID算法、超声波避障实现船体按照GPS轨迹自动巡航。应用STM32单片机实现对水温、PH、浊度、声纳等传感器的实时数据采集,如图2所示。
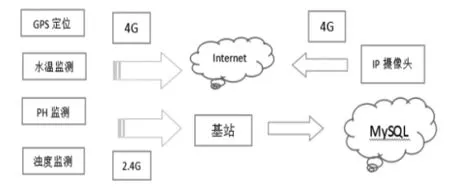
图2 自动巡航及传感数据采集
(3)数据传输层及实时监控。采用TCP/IP、2.4G无线两种通信方式完成传感器数据及视频传输。同时还能实时监控增氧设备及时补充水中的氧气,启动水温调节等装置,从而实现对水产养殖环境的实时监控,如图3所示。

图3 数据传输层及实时监控
(4)智能化应用管理平台。应用层提取数据库数据,分别实现网页端、PC端、手机端的应用;并进行数据处理和分析,为用户提供决策和分析的依据,如图4所示。

图4 智能化应用管理平台
2 功能实现与应用
(1)APM2.8实现船体按GPS轨迹自动巡航。无人船在大幅减少环境生态监控装置数量的同时,有效提高了装置的检测精度。分析国内学者在飞控APM无人机方面的研究,APM2.8飞控板结合Mission Planner地面站软件使动力船可根据所在区域地图规划的GPS轨迹运用PID算法对飞控板进行相应的调参设置,实现船体按照GPS轨迹自动巡航。为了规避障碍,动力船的前方、左侧及右侧都装有超声波避障探头,当侦测到的障碍信号时,动力船会改变当时的航行方向以避开障碍物,最终实现船的无人自动巡航,如图5所示。

图5 APM巡航轨迹图
(2)声呐探鱼,智能投料。在自动巡航船的底部装有声纳探头实时侦测鱼群的数量,并携带自动投料装置;当侦测到有鱼群信号时,船会停下启动自动投料装置;控制器根据鱼群的密度预设投料时间,若投料速度设为V,则投料量为M=VT,同时,控制器会自动记录鱼群的密度和投料的数量。投料结束后船体恢复航行状态,此时控制器控制声呐传感器停止侦测一段时间后再继续侦测鱼群(错开时间点检测)。这种移动式的投料方式实现了饲料的精准投喂,有效解放了劳动力以及节省饲料用量,如图6所示。

图6 声纳探鱼投料示意图

图7 水质监测曲线图
(3)水质监测。为了监测水产品在养殖过程中的环境因子如水温、PH值、溶氧量等数据流,在无人船上携带DS18B20温度探头、PH探头、TDS浊度传感器能实时监测水域水温、酸碱、浑浊度等生态环境因素。当水质出现异常时,如水域PH值过高,则系统会通知岸边基站开启异常保护模式,此时岸边基站根据水质异常情况自动启动水泵执行换水操作,及时改善水域的PH值直到恢复正常状态,如图7所示。
3 结语
文章研发的大型养殖水域监控系统,利用APM无人船的自动巡航功能,集移动式水质监测、预警、智能投料、视频监控、远程控制等功能于一体,旨在降低水产养殖成本的同时提高养殖的生产效率,为现代化水产养殖应用提供借鉴经验和参考价值。
参考文献
[1]孟祥宝,黄家怿,谢秋波,等.基于自动巡航无人驾驶船的水产养殖在线监控技术[J].农业机械学报,2015,46(3):276-281.
[2]颜波,石平.基于物联网的水产养殖智能化监控系统[J].农业机械学报,2014,45(1):259-264.
[3]胡金有,王靖杰,张小栓,等.水产养殖信息化关键技术研究现状与趋势[J].农业机械学报,2015,46(7):251-259.
[4]吕威,郭孔辉,张建伟.电动助力转向综合前馈和模糊PID反馈的电流控制算法[J].农业机械学报,2010,41(8):10-14.
[5]苗中华,李闯,韩科立,等.基于模糊PID的采棉机作业速度最优控制算法与试验[J].农业机械学报,2015,46(4):9-14.
[6]郭娜,胡静涛.插秧机行驶速度变论域自适应模糊PID控制[J].农业机械学报,2013,44(12):245-250.
[7]郑卫娟,胡云琴.基于APM飞控的无人直升机设计[J].信息与电脑:理论版,2013,(8):55-56.
[8]徐霄,刘寅生,李英东,等.基于APM2.8飞控器的可测温无人机控制系统[J].数码世界,2017,(1):131.
[9]张祖航,曹著明,薛翼飞.无人机APM-PIXHAWK飞控应用研究[J].职业,2017,(28):112-113.
猜你喜欢
玻璃(2022年1期)2022-02-23
水泵技术(2021年4期)2021-01-22
民用飞机设计与研究(2019年2期)2019-08-05
新课程(下)(2018年4期)2018-03-26
中国公共安全(2017年7期)2017-10-13
中外文摘(2017年19期)2017-10-10
计算机测量与控制(2017年6期)2017-07-01
中国篆刻·书画教育(2017年5期)2017-06-08
计算机系统应用(2017年5期)2017-06-07
现代工业经济和信息化(2016年12期)2016-05-17