6 m转台式全动高转速精密天线系统设计与应用
2018-05-21 09:12赵栋,苏伟
装备制造技术 2018年3期
赵 栋,苏 伟
(中国电子科技集团公司第三十九研究所,陕西 西安710065)
随着卫星通信技术的广泛应用和新技术、新型器件的出现,促使卫星通信地球站天线座架的设计水平不断提高[1]。天线整机的性能指标在很大程度上取决于天线及天线座架的结构设计和制造工艺水平,天线座架的机械性能有些直接休现了整个设备的使用性能[2]。天线座架是卫星通信地球站外部设备的重要组成部分。它是用来支撑天线、使天线完成预定运动、并能输出数据的装置[3]。天线座架是天线系统极其重要的一部分,天线座架设计的好坏,会直接影响天线系统的精度、制造成本、制造周期、可维修性、可靠性。
本文结合某研制项目,根据天线系统下达的具体指标要求,分析确定了天线座架的结构形式,然后详细设计了天线座架的各个主要部分,最后将实物测试参数与指标要求进行对比,表明天线座架实际性能达到了设计的预期,可以满足用户各项指标要求。
1 结构设计
6 m天线结构包括反射器结构、座架结构和辅助设施等。天线结构子系统如图1所示。
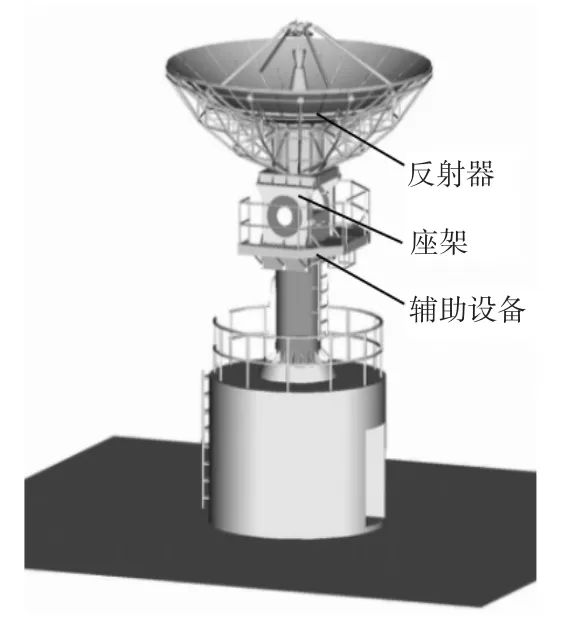
图16 m天线结构示意图
1.1天线反射器
反射器包括:主反射器、副反射器及其支撑杆。天线反射器结构如图2所示。

图2 天线反射器结构示意图
6 m天线主反射面为修正型旋转抛物面。为了提高精度、便于安装运输,主反射面分成16块可独立调整的面板。每块面板均由拉伸成型的2A12铝合金蒙皮和筋条在铆胎上铆接而成,具有足够的刚度和强度,如图3所示。
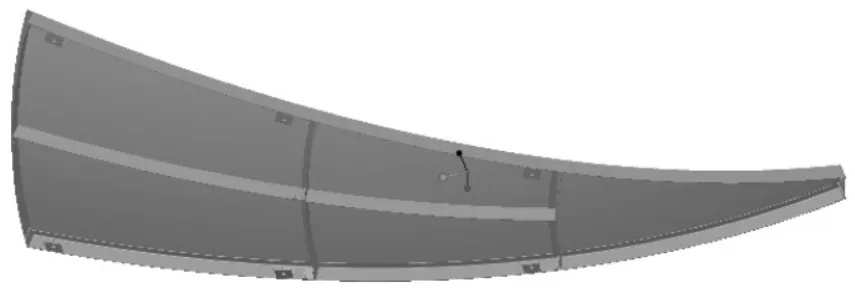
图3 天线面板结构示意图
为了便于维护人员进入主反射面内,在其中一块面板上开有窗口,如图4所示。
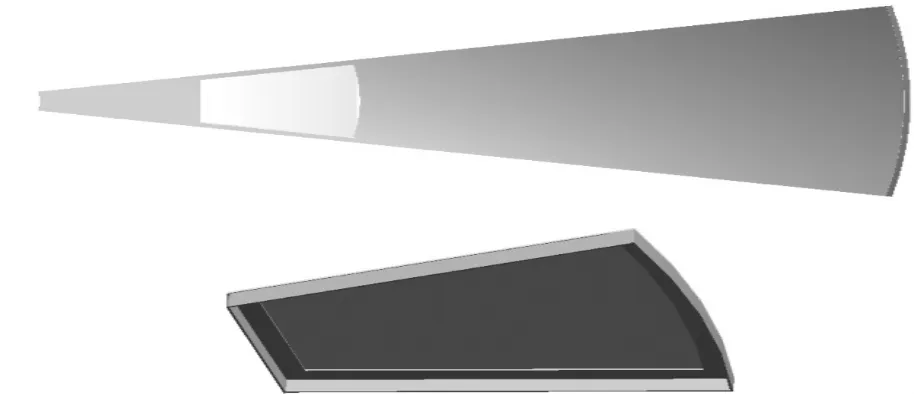
图4 开窗面板结构示意图
反射面背架结构的主要作用是支撑主反射面板,同时也是提供调整面板的一种手段。背架是由16片沿圆周向均匀排列的主力辐射梁及若干。
环梁构成的钢制空间桁架,各主力辐射梁之间的周向依靠由环梁连接。此外沿反射器背面有斜撑杆,以改善抗扭刚度。环梁和交叉杆件均由无缝钢管和角钢加工而成,背架中各零件均用螺栓连接。
副反射体为直径0.6 m的修正型旋转双曲面,它由铸造铝合金经数控车床加工成,副反射器支撑机构由四根撑杆构成,支撑在主反射器背架结构上,四根撑杆在顶部组件连接在一起,构成一个稳定的空间桁架,用以支撑和调整副反射面,如图5所示。

图5 副反射器结构示意图
1.2天线座架
天线座架是天线、馈电系统的支撑机构,又是天线驱动系统的执行机构。故要求它有良好的机械运转性能和指向精度。
天线座主要由方位组合、俯仰组合两大部分组成,方位俯仰均采用。双电机驱动,如图6所示。传动装置、电机和电缆等部分均内置于密闭的空间内,可以有效防止风沙对天线的侵袭,提高了设备的防护性能。

图6 天线座架结构示意图
1.2.1方位组合
方位组合包括立柱、方位传动装置、双电机、电缆卷绕机构等。立柱为钢管结构,内部布置加强筋,立柱底板与塔基连接,立柱底部有一个入口,便于安装维护人员进入。立柱上方采用转盘轴承,轴承外圈与立柱固定,内圈与方位大齿轮为一体,可绕方位轴转动。方位传动位于立柱密闭空间内,转盘轴承外加有防护罩,可防止沙尘进入,保证传动精度及可靠性。立柱上法兰中间留有线孔,在波导及线缆穿入后密封,如图7所示。
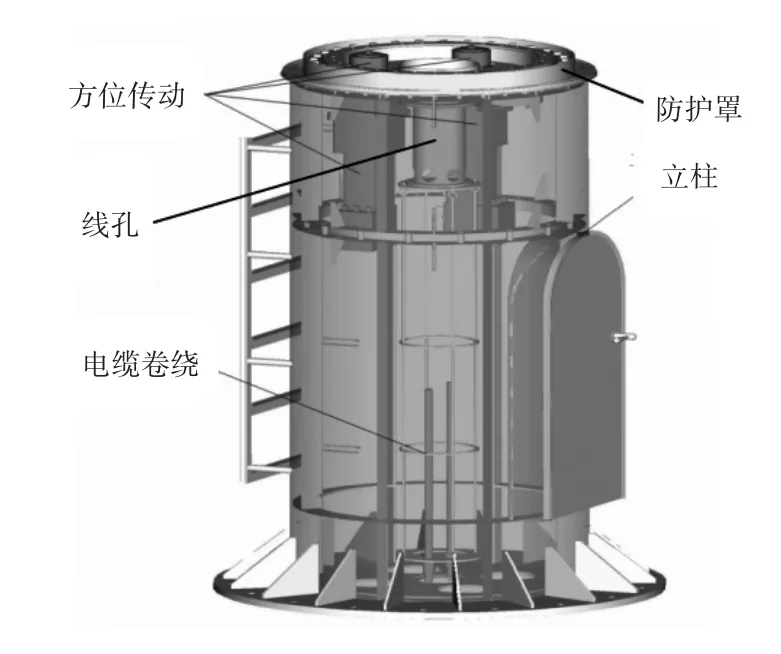
图7 方位底座结构示意图
电缆卷绕机构由挂链和滑动线盘组成,挂链上端固定在随方位转动的圆柱上,下端圆环与固定在立柱底部的导柱联接,电缆则分开固定在中间的几个圆环上,方位转动时,电缆随挂链一起扭转,载荷主要由挂链承担,同时也避免了电缆之间的互相缠绕。如图8所示。
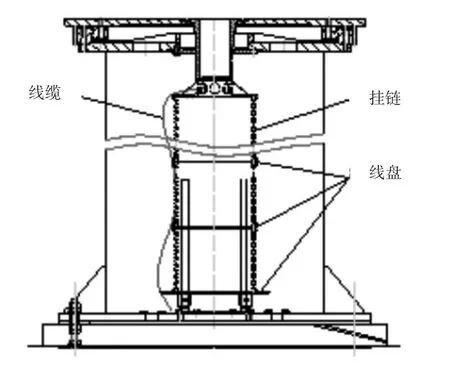
图8 电缆卷绕机构示意图
方位传动装置由末级齿轮副和行星减速器组成,当电机工作时,通过行星减速器和末级小齿轮带动大齿轮,驱动天线方位转动。方位行星减速器和电机位于立柱顶部,采用双链型式,以得到更好的抗风能力和消除间隙的效果,从而提高天线设备的可靠性。
方位限位固定在方位轴的一侧,并通过齿轮与方位轴上的齿轮啮合,方位限位与方位轴齿轮速比为1∶2,这样可将限位开关的范围由±180°转化为±90°,便于限位的调整。如图9所示。
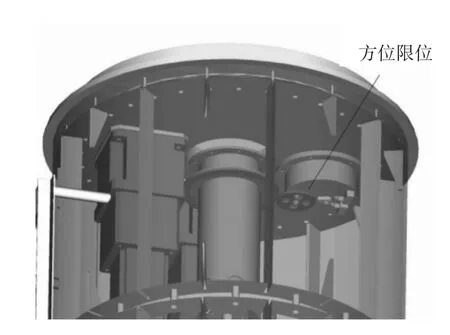
图9 方位限位机构示意图
1.2.2俯仰组合
俯仰组合由俯仰支架、俯仰传动装置、俯仰叉臂、双电机等组成。俯仰支架为一个钢板焊接而成的U型箱体结构,其底部与方位转台连接,底部中间孔用来铺设电缆和波导,内部两侧装有俯仰传动装置。俯仰支架一面安装有橡胶缓冲块,以防天线在下俯时的过度冲击,在另一面设置有俯仰锁定孔,用以在朝天位置的俯仰锁定,如图10所示。
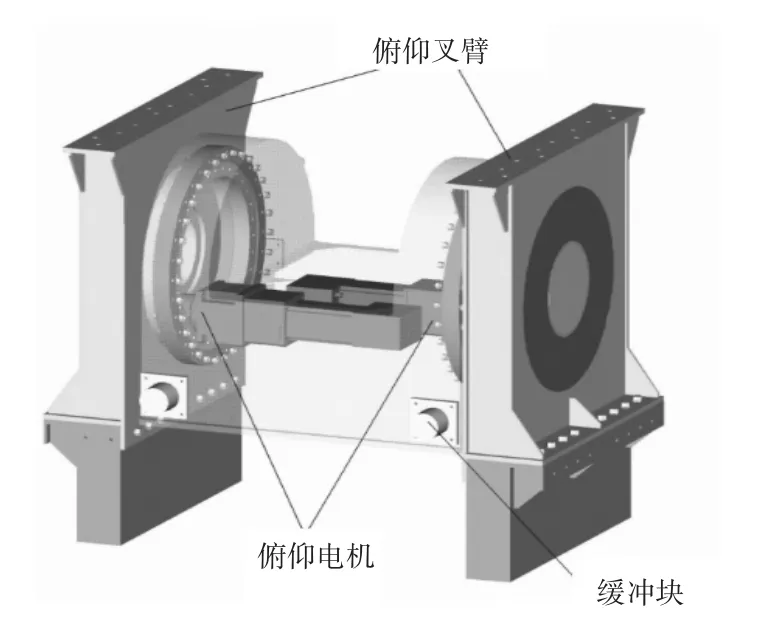
图10 俯仰组合示意图
俯仰传动装置与方位传动装置类似,同样由末级齿轮、行星减速器和电机组成双链系统。为了提高模块化程度,俯仰和方位采用同一参数的末级齿轮副。俯仰传动装置均放置在封闭的空间内,避免沙尘杂物的进入,如图11所示。

图11 俯仰防尘示意图
俯仰叉臂分左右两个,也是由钢板焊接而成的箱式结构。其内侧与俯仰转盘轴承内圈连接,通过两个转盘轴承构成俯仰轴,中间孔可用来穿过电缆和波导。俯仰叉臂顶部连接一个由矩形钢管焊接而成的框架,用于和天线反射体连接。
1.3辅助设备
1.3.1扶梯和平台
天线配备有维修用的扶梯和平台,便于维修人员安全、方便地接近安装在天线中心体的电子设备以及方位和俯仰驱动机构等设备。如图12所示。
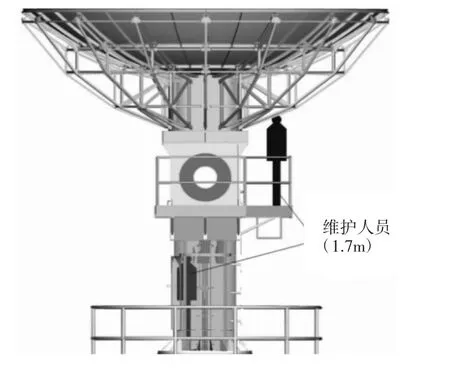
图12 扶梯平台示意图
1.3.2避雷器
天线上配有避雷针用来保护天线系统,为了避免干扰,避雷线与其它电缆分离,布置在天线外侧,避雷线的俯仰旋转部分预留余量,方位旋转部位采用圆环型的滑轨,保证在方位任意角度时避雷线上下部分能够不间断导通,避免了避雷线的大范围缠绕。如图13所示。

图13 避雷线布置示意图
2 性能验证
2.1指标要求
机械性能指标要求如下:
a)天线转动范围
方位:±180°,俯仰:0 ~ 90°,极化:±90°;
b)驱动角速度(方位俯仰相同)
0.01°/s ~ 5°/s(连续可调);
c)极化转速 0.05°/s ~ 2°/s;
d)指向精度<0.1 r.m.s.
2.2测试结果
对天线实物进行测试,将机械性能结果进行汇总,结果如表1所示。
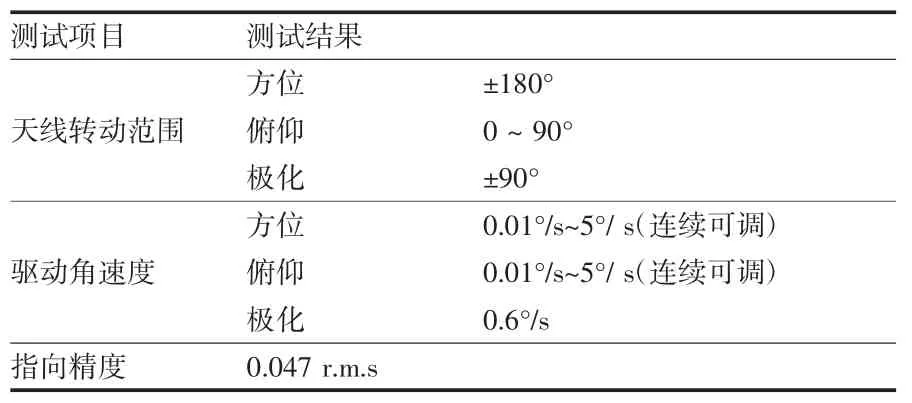
表1 天线机械性能测试结果汇总表
3 结束语
通过实物测试结果与指标要求进行对比,可看出天线结构性能各项指标均能满足用户指标要求,验证了天线结构设计方案的合理性。目前,该天线系统已在国内两处建站运行,各项性能良好稳定。
参考文献:
[1]施永钊.五米天线A-E座架设计[J].无线电通信技术,1983(8):27-35.
[2]吴风高.雷达天线座结构设计的现状和动态[J].西北电讯工程学院学报,1980(12):20-35.
[3]王文绪.7.5米天线座架的设计特点[J].无线电通信技术术,1986(08):50-53.
猜你喜欢
数字海洋与水下攻防(2020年5期)2021-01-04
数学小灵通(1-2年级)(2020年9期)2020-10-27
小型内燃机与车辆技术(2020年1期)2020-03-27
当代贵州(2019年41期)2019-12-13
质量安全与检验检测(2018年6期)2018-12-28
电子制作(2018年2期)2018-04-18
中国共青团(2015年7期)2015-12-17
科技与创新(2015年15期)2015-08-04
科技与创新(2015年8期)2015-05-06
科技与创新(2014年13期)2014-09-02