
面向数字化检测的阵列特征自动标注方法
2018-05-18 07:17:20郭建烨万景洋
锻压装备与制造技术 2018年2期
郭建烨,万景洋
(沈阳航空航天大学 机电工程学院,辽宁 沈阳 110136)
目前,我国航空企业在数字化检测环节逐渐采用三维图纸代替传统二维图纸的检测模式,随着MBD(Model Based Definition)技术的日益成熟,例如待检测产品尺寸、装配形位公差、产品表面粗糙度等制造过程所需相关信息均要表现在三维模型上。为了保证检测信息的准确和完整,基于MBD的数字化检测模型在定义时需要将待检测内容与其检测要求一一对应。根据已有的模型标注方法标准文件(GB/T24734数字化产品定义数据通则),对于阵列特征的标注方法是设计人员通常只对一组阵列特征中的一组成员进行PMI标注,例如对于由5组圆柱特征孔之间距离尺寸所组成的阵列,通常只是标注其中一组成员的距离尺寸“5×16±0.1”,即完成对其他成员尺寸约束的指代和关联。上述情况造成了检测信息的缺失,对MBD模型上待检信息的拾取和传递造成障碍。目前,对该问题的解决方法仍然依赖检测人员对MBD模型已有阵列特征检测信息标注的理解,再通过人工补全阵列特征成员上未标注的检测信息来解决该类问题。但人工补全检测信息的方法不仅工作量繁重,而且会出现由于检测人员的疏忽造成检测信息标注遗漏的问题。因此本文针对在数字化检测领域中MBD模型的阵列特征检测信息标注缺失的问题,结合几何图形点云配准的方法,提出了一种可以实现面向数字化检测阵列特征自动标注的方法。
1 阵列特征自动标注流程
首先从输入的MBD模型中获取阵列尺寸标注信息,以带有PMI约束信息的阵列特征成员为参考模型PA,其他未标注PMI约束信息的阵列特征成员均为待配准模型QA,在参考模型和待配准模型上以几何元素端面中心点为初始点,以相同布点密度进行采样点的均匀分布,设P为参考模型上的采样点云,即参考点云;Q为待配准模型上的采样点云,即待配准点云。采用主成分分析法(PCA)对两点云进行初始配准,在完成初始配准后,采用最近点迭代法(ICP)算法对其进行精确配准,优化两点云信息的变换矩阵,并判断最近点迭代均方差是否小于设定阈值。若小于设定阈值,则完成两点云间配准;若大于设定阈值,即不满足预设效果,则需重复上述步骤过程,直到满足小于阈值的要求。完成点云配准后,提取参考模型上的PMI约束信息,将其自动标注到其他未标注PMI约束信息的阵列特征成员上,从而完成对阵列特征上PMI约束信息的快速自动标注。自动标注流程如图1所示。
1.1 点云初始配准
为了减小模型初始位置对配准结果的影响,采用PCA算法进行点云的初始配准,PCA算法通过坐标轴方向对点云进行配准计算,首先读取参考点云和待配准点云的信息数据集,通过读取的点云信息数据分别计算出P和Q的质心,即求得两点云的坐标轴原点。通过计算参考点云协方差矩阵covp和待配准点云协方差矩阵covq,求出两点云的特征向量。最后计算两点云的变换矩阵,使用该变换矩阵将待配准点云和参考点云转换到同一空间坐标系下。进而判断两点云形态是否大致重合,若两点云大致重合,则完成点云间的初始配准,若未达到基本重合的预计效果,则需重复上述计算过程求出新的变换矩阵。

图1 阵列成员配准方法流程图
基于PCA的初始匹配具体过程如下:
(1)构造参考点云矩阵和待配准点云阵。
参考点云矩阵:

待配准点云矩阵:
(2)求两点云质心。


(3)求两点云协方差矩阵。
参考点云的协方差矩阵:

待配准点云的协方差矩阵:

(4)求出参考点云和待配准点云协方差矩阵的特征向量和特征值,按特征值从大到小排序,得出特征向量矩阵T1和特征向量矩阵T2。T1和T2满足如下公式关系:

式中:T——平移矩阵;
R——旋转矩阵。
(5)设点qi为待配准点云Q中的点,点q′i为点qi通过旋转平移变换得到参考点云P所在坐标系下的点。如下公式:

把待配准点云中的点坐标通过变换矩阵,变换到参考点云所在的坐标系下,进而完成对点云的初始配准。
1.2 点云精确配准
在初始配准后虽然两片点云大致重合,但仍未满足工业上的配准精度,为了使参考点云和待配准点云达到更精确配准要求,还需要采用更精确配准算法来优化模型配准效果。ICP算法是较为常用,并且配准效果良好的点云精确配准算法。该算法在求两点云之间的变换矩阵时,需要满足设定的收敛条件,即满足两点云匹配的精度要求,因此需要在几何模型上的点云进行重复选取,并进行点云求解。当通过转化计算后得出的对应点对,其方差结果小于设定的收敛条件时,则表明完成两点云的精确配准过程 。目标函数表示如下:

设ε=0.0001为设定阈值,判断f(T*R)<ε是否成立,即判断最近点迭代均方差是否小于设定阈值,若不等式关系成立,则完成点云间精确配准。若不等式关系不成立,则需重新选取模型上的点云进行计算,直到满足设定的收敛条件。
1.3 自动快速标注PMI信息
经过模型点云初始配准和精确配准算之后,确定了带有PMI约束信息的阵列特征成员PA和未带有PMI约束信息的阵列特征成员QA各自点云间的匹配关系,复制PA中标注的PMI约束信息,将该信息添加到QA上,重复该步骤,直到完成对所有阵列特征成员的标注添加,实现对整组阵列特征所缺失标注约束信息的补全。
2 应用实例
本实验针对如图所示模型中的阵列特征成员进行PMI标注的自动补全实验,输入MBD检测模型,如图2所示,其中MBD模型中带颜色标注为阵列特征标注的实际情况,提取MBD模型中阵列特征成员中标注PMI的成员,设为参考模型对象PA,即如图3a、3b中黄色部分,而蓝色部分表示阵列特征成员中缺失PMI信息的成员,设为待配准模型对象QA。以几何元素端面中心点为初始点,以相同布点密度进行采样点的均匀分布,获取能够表征各阵列成员几何形状的采样点云。设黄色部分参考模型对象PA上的点云为参考点云P,蓝色部分待配准模型对QA上的点云为待配准点云Q,如图4c、4d中,将参考点云P和待配准点云Q分别进行点云的初始配准和精确配准,从而确定模型对象之间的对应关系。通过提取PA中PMI约束信息,并将该信息复制并自动添加到QA对应位置上,完成标注信息的自动添加,如图5e、5f所示。
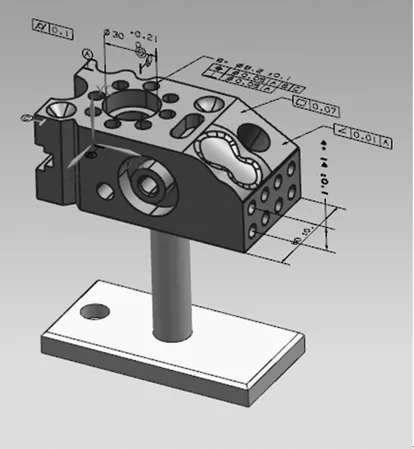
图2 MBD三维尺寸标注模型

图3 MBD三维模型阵列特征尺寸标注情况

图4 阵列特征成员上均匀采样

图5 补全PMI的阵列特征标注情况
3 总结
以检测专用标准模型为例进行实验,通过采用主成分分析法与最近点迭代法,完成了三维模型中阵列特征成员之间的模型点云配准过程,确立了阵列特征成员间的对应关系。根据阵列特征成员已有PMI约束信息对其他未标注PMI约束信息的阵列特征成员进行快速自动标注,解决了数字化检测模型阵列特征约束信息标注遗漏的问题。方法的实现避免了频繁人机交互造成信息遗漏的问题,有效地减少了检验人员的手工补全尺寸标注的工作量,缩短了产品检测的前期准备时间。实现检测信息从设计模型到检测模型的自动化传递,保证了基于MBD的数字化检测模型的唯一性,为日后研究人员在数字化检测技术的点云配准理论研究中提供一种可行的参考。
参考文献:
[1] 许璟琳,郑国磊,王 勃.基于GB/T24734的三维尺寸快速标注技术[J].图学学报,2013,34(5):138-139.
[2]GB/T 24734.8-2009,技术产品文件 数字化产品定义数据通则[S].
[3] 钟 莹,刘丰华.复杂模型三维点云自动配准技术研究[J].世界科技研究与发展,2014,6(2):121.
[4] 常 江.基于特征匹配的三维点云配准算法研究[D].太原:中北大学,2015.
[5] 孟 禹.基于采样球和ICP算法的点云配准方法研究[D].北京:清华大学,2012.
[6] Good R P,Kost D,Cherry G A.Introducing a Unified PCA Algorithm for Model Size Reduction[J].Semiconductor Manufacturing,IEEE Transactions,2010,23(2):201-209.
[7] Fukushima A,Wada M,Kanava S.SVD-Based Anatomy of Gene Expressions for Correlation Anlysis in Arabidopsis Thaliana[J].DNA Reasearch,2008,16(6):367-374.
[8] 戴静兰,陈志杨,叶修梓.ICP算法在点云配准中的应用[J].中国图像图形学报,2007,12(3):518-520.
[9] 常 江,秦品乐,刘毛毛,等.基于点云配准的工业测量技术研究[J].电子器件,2015,38(4):929-931.
[10]郑德华.ICP算法及其在建筑物扫描点云数据配准中的应用[J].测绘科学,2007,32(2):31-32.
[11] 刘丰华.复杂模型三维点云自动配准技术的研究[D].天津:天津大学,2013.
[12] 杨现辉,王惠南.ICP算法在3D点云配准中的应用研究[J].计算机仿真,2010,27(8):235-237.
猜你喜欢
加油站服务指南(2021年4期)2021-07-21 02:29:22
金属加工(冷加工)(2020年11期)2020-11-24 08:58:20
数学年刊A辑(中文版)(2020年1期)2020-05-19 00:30:30
读者(2019年20期)2019-10-09 03:34:59
环球时报(2019-01-04)2019-01-04 06:17:07
测控技术(2018年5期)2018-12-09 09:04:24
精密制造与自动化(2018年1期)2018-04-12 07:42:50
中国国家旅游(2016年3期)2016-09-21 09:48:00
设备管理与维修(2016年5期)2016-03-16 02:20:46
人生十六七(2015年6期)2015-02-28 13:08:38
