双足仿人机器人行走系统结构设计与优化
2018-05-18 07:23:32刘璞吕栋栋吕琼莹
新型工业化 2018年4期
刘璞,吕栋栋,吕琼莹
(长春理工大学机电工程学院,吉林 长春 130022)
0 引言
虽然经过多年的研究,但是当今的仿人机器人在稳定性、自适应能力等方面还无法和人类的行为功能进行相比。这些能力的实现和提升还依赖于机械结构的发展和研究[2]。在机器人进行行进时,产生较小的惯性、较低的扭曲变形是结构设计时需要重点考虑的因素,是对机器人正确控制的前提。所以,对承受机器人大部分重量的双腿,是双足仿人机器人结构设计时重点考虑的对象,对结构进行优化设计能够确保机器人的行走稳定性、自适应性,并且降低设计结构的复杂性[3]。因此,开展双足仿人机器人行走系统的相关研究具有重要的现实意义和应用价值。
1 双足仿人机器人行走系统结构总体设计
双足仿人机器人的结构设计是行走系统的重要组成,所以需要对双足仿人机器人行走系统的行走原理进行详尽的分析,确保行走系统是稳定的、实用的,而且体现出一定的美观性[4]。为此,本文采用拟人化分析和模块化设计的思想来对行走系统结构进行设计,实现结构的自由度配置以及尺寸的确定,并充分考虑动力源来使得机器人行走的稳定。
1.1 机器人结构的拟人化分析
人类的行走需要关节的支持。原则上机器人的关节越多带来更好的灵活性,但是会造成机器人控制难度的提高,这就导致在行走系统设计上与其实现行走基本功能出现了矛盾。所以处理好设计和拟人化之间的矛盾是结构设计的重点内容,即如何实现较好的拟人化和较易的控制[5]。
要化解这一矛盾需要将双足仿人机器人的行走系统与人的行走原理相互结合,切实对人的行走所需要的各个关节进行详尽的分析,获取各个关节之间的协助作用、受力情况,从而使得仿人机器人在进行关节设计时候能够获取到类人的自由行走、稳定行走[6]。人体的骨骼分为上肢骨和下肢骨,本文只研究行走系统,所以只讨论下肢骨。下肢骨又可以分为下肢带骨和自由下肢骨,在下肢骨对行走系统影响最大的关节有髋关节、膝关节和踝关节[7],如图1所示,下方的关节为踝关节,有两个自由度,1为俯仰自由度(同11),2为滚动自由度(同12);中间的关节为膝关节,有一个自由度,3为俯仰自由度(同10);上方的关节为髋关节,有三个自由度,4为俯仰自由度(同7),5为偏摆自由度(同8),6为滚动自由度(同9)。对行走系统的拟人化分析主要对这些关节的结构以及替换转换方法进行分析和研究。
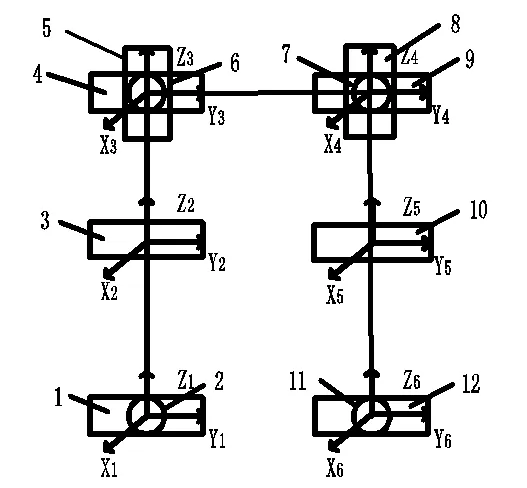
图1 双足仿人机器人自由度配置Fig. 1 Bipedal humanoid robot. freedom configuration
1.1.1 双足仿人机器人行走系统的自由度配置分析
行走系统自由度的合理配置是双足仿人机器人行走稳定的根本保证,同时可以让控制难易程度得到较好的保证。在最初的设计中,研究人员考虑了双腿的4个自由度,分别为踝关节的两个自由度和髋关节的两个自由度,从而使得机器人可以往前走,并控制重心的转移。但是这种方法没有考虑膝关节的自由度,使得机器人行走特别僵硬。为此,本文采用6个自由度的设计方法[8]。但是如果只是对踝关节的摇摆自由度进行简化,由髋关节辅助完成,这种方法虽然在灵活性上得到了较大提高,但是使得动作协调的控制更加难。因此,本文对膝关节增加两个自由度,每个关节分配2个自由度,使得设计实现低成本、高灵活、结构简单化,而且机器人的行走系统结构体积小,不仅仅会前进,还实现了倒退、转弯、平移以及各种动作的组合[9]。
1.1.2 双足仿人机器人行走系统的尺寸确定
人的行走通过膝关节协调,那么对于机器人,行走系统可以简化为连杆的结构,并在此基础上考虑美观性,根据黄金分割比例,将黄金数的值定位0.618[10]。所以我们将双足仿人机器人的身高定位120 cm,然后在黄金分割系数的指导下,下身长度定位为120×0.618等于71.16 cm,然后在去掉腰后大腿以及小腿的长度则分别为37.08 cm和22.92 cm,然后四舍五入取整,大腿长度为37 cm,小腿长度为23 cm。
(1)信任前因。本文选取的资产负债率(apl)和营业收入(turnover)两个企业特征变量均在较高的置信水平下显著,前者与能力信任(trust_ab)负相关,后者与能力信任正相关,表明小微企业的负债率越低,营业收入越高,越有助于提升银行对企业的能力信任。
1.2 双足仿人机器人行走系统驱动方式的选择
当前双足仿人机器人行走系统在驱动方式选择上主要有电机驱动、气压驱动和液压驱动三种。三种方式各有优缺点。电机驱动是应用最广泛的一种,响应快、启停控制强。电机一般选择步进电机或者伺服电机。步进电机控制不好情况下容易产生共振现象,对机器人的稳定性造成不良影响。伺服电机调速相对容易,控制精度相对较高,过载能力较强,但是价格较高。所以对于机器人而言,选择伺服电机可实现较好的控制性和稳定性[11]。
气压驱动应用也相对广泛,这是由于气压驱动方式成本较低,只需要有空气就可以工作,适应性更强。但是该方式噪声大,稳定性相对较弱,这也使得气压驱动应用在机器人上较少,特别是应用到关节驱动上。
液压驱动主要通过油管连接使得整个驱动的质量较低、空间较小,但是这种方式存在漏油现象,对于某些场合不适用。这导致了液压驱动在双足仿人机器人上应用较少。
根据上述分析,我们在驱动方式的选择上选用伺服电机,使得整个系统和关节具有较好的稳定性、控制性和灵活性。
1.3 双足仿人机器人行走减速机构的选择
确定了驱动方式之后,接下来的设计主要是要考虑电机的转速问题,即电机转速与人的步行产生的转速的一致,这需要通过减速实现。减速主要通过涡轮蜗杆减速器(图2)、谐波减速器(图3)和行星减速器(图4)实现[12]。
蜗轮蜗杆减速器在精确性上处于优势,并且具有反向自锁能力。但是体积较大,效率不高,不适合于双足仿人机器人。

图2 涡轮蜗杆减速器Fig. 2 Turbine worm gear reducer
行星减速器形成的机构体积较小,回程间隙小,精度高,在一定程度上满足机器人的需求,但是造价高。

图3 谐波减速器Fig. 3 Harmonic reducer
谐波减速器适应性好,机械性能佳,在仿人机器人上应用较好,所以本文选择谐波减速器作为仿人机器人的减速部件。

图4 行星减速器Fig. 4 Planetary reducer
1.4 双足仿人机器人行走系统的模块化设计方法
模块化设计具有更好的可再塑性、还原性、修复性等优点,在双足仿人机器人行走系统设计上得到研究人员的广泛研究和应用。本文首先分析双足仿人机器人的行走系统所要具备的功能和特点,然后对结构分层分类,对各个功能进行合理的分组,使得维护性、改进型得到加强,而且降低成本。本文将减速器和机电两部分构成关节模块,进一步细分又将关节模块分为膝关节俯仰关节模块和髋关节和踝关节十字交叉关节模块[13]。
2 双足仿人机器人行走系统的优化方法
2.1 双足仿人机器人行走系统拓扑结构的优化
优化是在确定了结构之后进行的。拓扑优化是解决材料的合理分配问题,该优化方法不需要指定优化的变量,不需要人为设定。只需要确定所使用的材料的结构特性,然后在给定的材料属性中确定参数[14],由程序自动优化,本文主要是优化大腿的支架和小腿。
对这两个部件,优化之前分析所需零件的受力情况,如大腿所要承受的最大力矩,小腿的最大负载等。这些分析师基于大腿支架的变形机理进行的。经过分析可知,大腿支架的受力可以简化认为是髋关节连接处的固定约束关系。然后将优化目标定位40%,从而就可以基于拓扑优化方法对大腿支架进行拓扑优化。对于小腿的拓扑优化类似。
2.2 双足仿人机器人行走系统目标驱动的优化方法
拓扑优化是对零件设计的拓扑性状优化,目标驱动优化则是在拓扑优化的基础上进一步的优化,是承接关系。目标驱动优化需要确定参数样本点,对样本进行参数的输入,从而根据插值函数生成样本的曲线、响应面。插值方法具有一定的误差,需要通过多次拟合进行优化,使得结果更加精确,达标最优[15]。
由于参数非常重要,所以目标驱动优化方法还需要借助灵敏度分析方法[16]。灵敏度分析方法对支架的尺寸参数产生的影响进行分析和评价。灵敏度分析方法对大腿支架尺寸变量产生的效应等进行分析,从而确定参数变量、优化目标变量。
3 结束语
本文拟人化思想运用到仿人机器人行走系统的整体设计方案当中,分析了人体的关节特征及行走机理,确定了待设计结构的自由度形式和分布方案,整体尺寸;选择了合理的驱动方式,结构材料,通过合理布置电机位置来减少结构的运动惯性,对双足仿人机器人的进展具有一定的推动作用。
参考文献
[1] 郭发勇. 仿人双足机器人多地形步态规划和稳定控制方法研究 [D]. 合肥: 中国科学技术大学, 2016.GUO Fa-yong. Study on Multi-terrain Gait Planning and Stability Control Method of Humanoid Bipedal Robot [D]. Hefei:China University of Science and Technology, 2016.
[2] 江开春. 基于双足仿人机器人的设计与研究 [D]. 石家庄: 石家庄铁道大学, 2014.JIANG Kai-chun. Design and Research of Bipedal Humanoid Robot [D]. Shijiazhuang: Shijiazhuang Railway University, 2014.
[3] 张雨. 仿人机器人的设计与研究 [D].青岛: 青岛科技大学, 2017.ZHANG Yu. Design and Research of Humanoid Robot [D]. Qingdao: Qingdao university of Science and Technology, 2017.
[4] 周玉林, 高峰. 仿人机器人构型 [J]. 机械工程学报, 2006(11): 66-74.ZHOU Yu-lin, GAO Feng. Humanoid Robot Configuration [J]. Journal of Mechanical Engineering, 2006(11): 66-74.
[5] 杨东超, 刘莉, 徐凯, 等. 拟人机器人运动学分析 [J]. 机械工程学报, 2003, 39(9): 70-74.YANG Dong-chao, LIU Li, XU kai, et al. Analysis on Kinematics of Humanoid robots [J]. Journal of Mechanical Engineering,2003, 39(9): 70-74.
[6] CHEVALLEREAU C, GRIZZLE J W, SHIH C L. Asymptotically Stable Walking of a Five-Link Underactuated 3-D Bipedal Robot [J].IEEE Transactions on Robotics, 2009, 25(1): 37-50.
[7] 张璐, 毛伟伟, 梁青, 等. 仿人机器人小腿减振控制研究 [J]. 计算机仿真, 2017, 34(4): 340-344.ZHANG Lu, MAO Wei-wei, LIANG Qing, et al. Research on the Vibration Control of Humanoid Robots [J]. Computer Simulation, 2017, 34(4): 340-344.
[8] 王健. 两足仿人机器人的研制 [D]. 南京: 南京航空航天大学, 2009.WANG Jian. Development of Bipedal Humanoid Robot [D]. Nanjing: Nanjing University of Aeronautics and Astronautics,.2009.
[9] 田阳. 小型双足仿人机器人的设计与研发 [D]. 青岛: 中国海洋大学, 2013.TIAN Yang. Design and Development of Small Bipedal Humanoid Robot [D]. Qingdao: China Ocean University, 2013.
[10] 肖乐, 张玉生, 殷晨波. 仿人机器人双足行走模型研究 [J]. 计算机工程, 2011, 37(12): 173-175.XIAO Le, ZHANG Yu-sheng, YIN Chen-bo. Research on Bipedal Walking Model of Humanoid Robot [J]. Computer Engineering, 2011, 37(12): 173-175.
[11] 付根平. 仿人机器人的步态规划和步行控制研究 [D]. 广州: 广东工业大学, 2013.FU Gen-ping. Study on gait planning and walking control of humanoid robots [D]. Guangzhou: Guangdong university of technology, 2013.
[12] LAPEYRE M, ROUANET P, OUDEYER P Y. The poppy humanoid robot: Leg design for biped locomotion [C]//Ieee/rsj International Conference on Intelligent Robots and Systems. IEEE, 2014: 349-356.
[13] 周珺. 科技信息化与企业的创新发展 [J]. 新型工业化, 2016, 6(12): 77-80.ZHOU Jun. Technology Informatization and Enterprise Innovation Development [J]. New Industrialization, 2016, 6 (12): 77.80.
[14] 朱洪波. 仿人机器人高效步行模式生成与高稳定动态行走控制方法研究 [D]. 合肥: 中国科学技术大学, 2017.ZHU Hong-bo. Research on the Generation and High Stable Dynamic Walking Control Method of Humanoid Robot with Efficient Walking Mode [D]. Hefei: China University of Science and Technology, 2017.
[15] FAKOOR M, KOSARI A, JAFARZADEH M. Humanoid Robot Path Planning with Fuzzy Markov Decision Processes [J]. Journal of Applied Research & Technology, 2016, 14(5): 300-310.
[16] 戴卫力, 侯浩. 基于MCGS的伺服电机驱动器人机接口设计 [J]. 新型工业化, 2017, 7(9): 7-11.DAI Wei-li, HOU Hao. Based on MCGS Servo Motor Drive Man-machine Interface Design [J]. The Journal of New Industrialization, 2017,
猜你喜欢
汽车实用技术(2022年7期)2022-04-20 11:45:04
房地产导刊(2020年11期)2020-12-28 01:32:30
铁道通信信号(2019年10期)2019-11-25 09:40:54
铁道通信信号(2019年4期)2019-10-10 03:42:56
军事文摘(2018年24期)2018-12-26 00:57:40
传感器与微系统(2018年7期)2018-08-29 00:44:24
通信电源技术(2016年1期)2016-04-16 04:57:31
现代商贸工业(2016年35期)2016-04-09 06:59:58
现代制造技术与装备(2016年12期)2016-04-06 03:35:38
智能系统学报(2015年4期)2015-12-27 09:38:10