
运动智能指标的电子采集终端设计与实现
2018-05-15 06:43唐大鹏
现代电子技术 2018年10期
唐大鹏
摘 要: 為了能够根据运动指标的具体类型,完成指标的分类处理,设计运动智能指标的电子采集终端。通过硬件框架设计、通信接口设计、操作平台设计,完成运动智能指标电子采集终端的硬件设计;通过主程序设计、主站命令处理程序设计、其他程序设计,完成运动智能指标电子采集终端的软件设计。模拟该终端的运行环境设计对比实验,结果表明,应用运动智能指标的电子采集终端后,指标间相互影响关系得到抑制,可在最短时间内完成运动指标分类,提升指标分类处理速度。
关键词: 运动智能指标; 电子采集终端; 硬件框架; 通信接口; 软件主程序; 主站命令处理
中图分类号: TN99?34; TP391 文献标识码: A 文章编号: 1004?373X(2018)10?0031?04
Abstract: An electronic acquisition terminal for sports intelligent index was designed to accomplish the classification processing of indices according to the specific types of sports indices. The hardware design of the electronic acquisition terminal for sports intelligent index was accomplished by means of the design of hardware framework, communication interface, and operation platform. The software design of the electronic acquisition terminal for sports intelligent index was accomplished by means of the design of main program, master station command processing program, and other programs. The contrast experiment was designed by simulating the operating environment of the terminal. The result shows that the electronic acquisition terminal for sports intelligent index can suppress the interaction influence relationship between indices, accomplish sports index classification within the shortest time, and improve the processing speed of index classification.
Keywords: sports intelligence index; electronic acquisition terminal; hardware framework; communication interface; software main program; master station command processing
为了解决运动指标分类问题,通过构建封闭式系统的方式,统一指标处理过程中必须应用到业务标准及程序接口。这样的指标分类方式虽然建立了统一的运动指标分类规则,但待处理运动指标总量过于庞大时,原有方式的分类速度明显不能满足人们的需求。为解决此问题,建立运动智能指标的电子采集终端就显得极为有必要[1?2]。运动智能指标的电子采集终端不再使用传统的单片机充当硬件模块,而是在新型的ARM的目标板上,以Linux系统作为操作平台的建立基础,并通过平台层模块间的嵌套关系实现Linux系统操作平台的顺利运行。运动智能指标的电子采集终端的软件部分,既包含了相关主程序及主站处理命令,也对其他程序进行规范限定,在管理进程通信代码的同时完成主调度代码的顺利实现。对于整体采集终端来说,是以电子技术作为建立依据,并在此基础上,通过相关计算机手段完善终端的整体搭建[3]。通过运动智能指标电子采集终端的应用,不仅解决了原有指标分类方法中系统过于封闭、业务标准及程序接口过于单一的问题,也使得运动指标间的相互影响关系,得到了有效的抑制,并最终达到提升指标分类处理速度的目的。
1 运动智能指标电子采集终端硬件设计
运动智能指标电子采集终端硬件设计依靠硬件框架设计、通信接口设计、操作平台设计三部分完成,具体搭建方法如下所述。
1.1 运动智能指标电子采集终端硬件框架
运动智能指标电子采集终端硬件框架的核心结构为STM32F103主控芯片;并由该芯片与接口模块、运动指标存储模块、运动指标采集模块等主要结构进行信息交流[4]。其中,电源模块不能与STM32F103主控芯片直接产生信息交流。该模块只能先与运动指标采集模块进行相互交流,再由运动指标采集模块将与电源模块有关的信息传输至STM32F103主控芯片,以供后续的信息交流使用。具体框架结构如图1所示。

1.2 运动智能指标电子采集终端通信接口
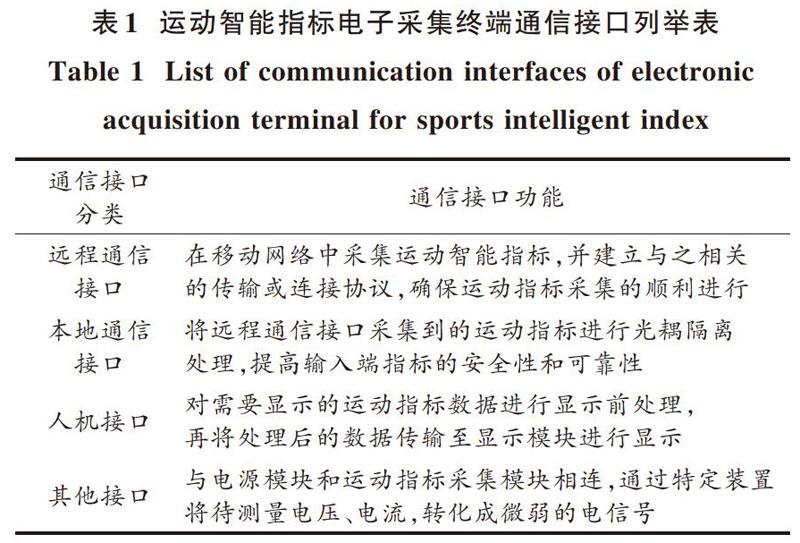
运动智能指标电子采集终端通信接口由4个具有不同功能的接口共同组成。其中,远程通信接口负责在移动网络中采集运动智能指标,并建立与之相关的传输或连接协议。本地通信接口负责将远程通信接口采集到的运动指标进行光耦隔离处理,以提高输入端指标的安全性和可靠性[5?6]。人机接口负责对需要显示的运动指标数据进行显示前处理,再将处理后的数据传输至显示模块进行显示。其他接口负责与电源模块和运动指标采集模块相连,通过电压互感器等装置将待测量电压、电流,转化成微弱的电信号。具体通信接口分类及其功能如表1所示。
1.3 运动智能指标电子采集终端操作平台
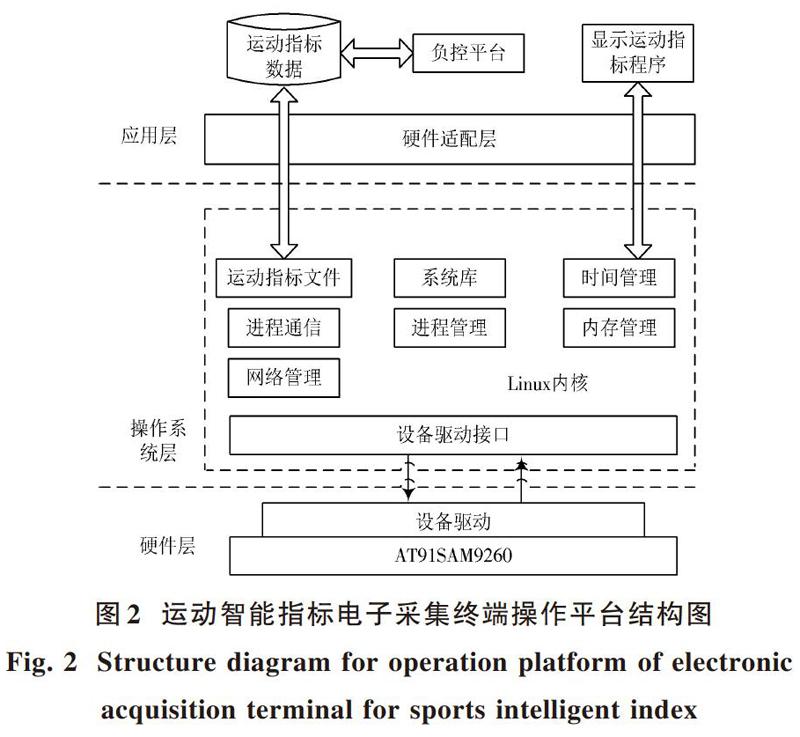
运动智能指标电子采集终端操作平台,包括应用层、操作系统层、硬件层三部分。其中,应用层由运动指标数据、负控平台、显示运动指标程序三大结构组成。操作系统层包括运动指标文件、系统库、进程管理等结构,且这些结构都包含在Linux内核中,受到设备驱动接口控制[7?8]。硬件层的核心设备为AT91SAM9260设备,该设备作为硬件驱动,与设备驱动接口进行运动指标的实时交换。操作平台具体结构如图2所示。
2 运动智能指标电子采集终端软件设计
上述完成了运动智能指标电子采集终端硬件设计,为了使该终端的功能更加完善,还需按照如下步骤完成软件部分搭建。
2.1 运动智能指标电子采集终端软件主程序
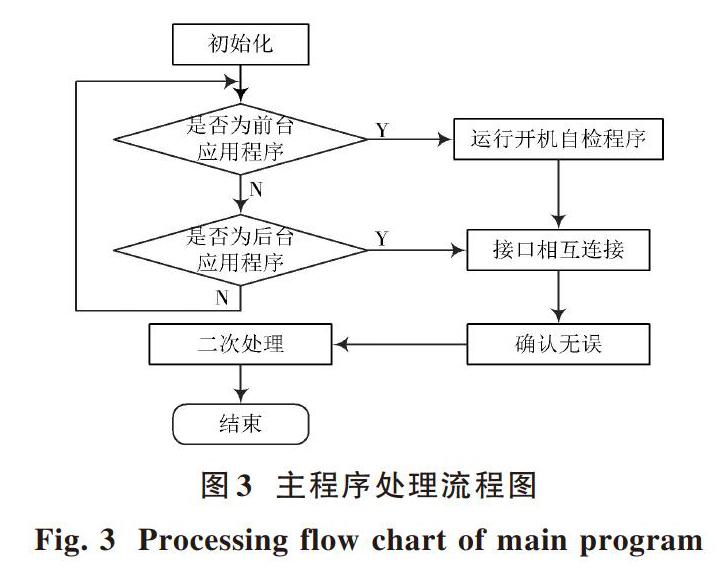
运动智能指标电子采集终端软件主程序由前台应用程序和后台应用程序两部分组成。其中,前台应用程序主要负责运行终端的开机自检程序,并根据不同的主程序要求,对相关硬件设施进行程序初始化。在确定所有设备中存储的运动指标数据准确无误后,令后续子程序模块开始执行新一轮程序[9]。后台应用程序可促进各级通信接口的相互连接,并检查每个接口中的运动指标数据是否符合接口要求,确认无误后,将指标数据传输给处理模块进行二次处理。主程序处理流程如图3所示。
2.2 运动智能指标电子采集终端主站命令处理
运动智能指标电子采集终端主站命令处理,包含主站命令的接收与执行、主站命令的传输两部分。为了和主站间保持有效而紧密的连接,命令处理模块会不定期发送运动指标数据包,并促使主站命令接收模块,对数据包中的指标进行分析、判断,将分析结果传输至执行模块,令该模块按照结果执行主站命令[10?11]。在上述过程中,主站命令传输模块作为线性结构,为运动智能指标的传输提供保障。具体主站命令处理流程如图4所示。

2.3 运动智能指标电子采集终端其他软件程序
运动智能指标电子采集终端的其他软件程序包含运动指标数据定时上报、指标数据统计与处理、数据采集工况监控三大主要环节[12]。其中:运动指标数据定时上报,负责将采集到的运动指标数据,在准确的时间上报给上机数据接收组织,再从存储模块中,重新调取运动指标数据;指标数据统计与处理,负责对初步采集到的运动指标数据进行统计分析,并判断当运动指标数据需量达到最大时,所需要的指标配置参数[13];数据采集工况监控,负责对运动指标数据进行输入/输出状态监控,当指标数据输入、输出状态发生改变时,数据采集工况监控模块会自动生成事件记录数据,并将该数据传输给数据库进行储存。详细软件程序分类情况见表2。

3 实验结果与分析
第二节完成了运动智能指标电子采集终端的设计与实现。为了验证该终端的实用性价值,模拟其使用环境进行实验,对比应用该终端前后運动智能指标间相互影响关系、指标分类速度。
3.1 实验参数设置
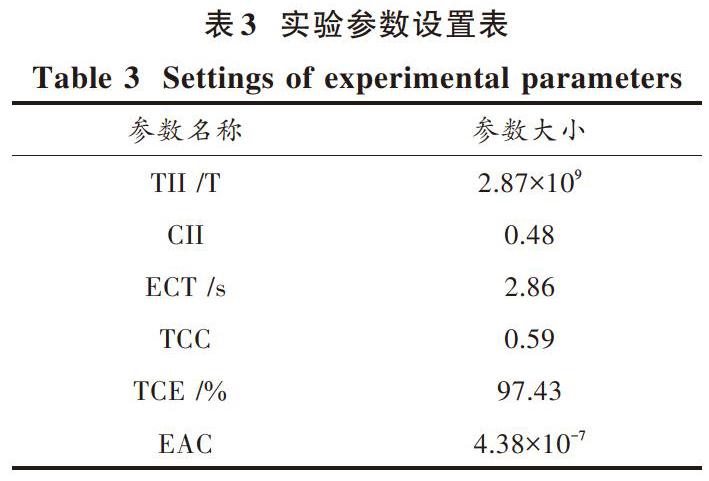
实验开始前,可遵照表3完成实验参数设置。表3中参数名称依次为运动指标总量、影响关系系数、预期分类时间、终端连接系数、终端连接效率、电子采集系数。为保证实验的公平性,应用该终端前后的参数配置均遵照表3。
3.2 指标间相互影响关系对比
完成实验参数设置后,首先应用普通方法进行运动智能指标采集,再应用运动智能指标电子采集终端进行运动智能指标采集。在采集过程中,应用该终端前、后指标间相互影响关系如图5、图6所示。

图5中圆点代表运动智能指标,点与点之间的连线代表指标间的相互影响关系,线与线之间保持相互独立,且不发生交叉关系,代表指标间相互影响关系较小。若线与线之间不能相互独立,且发生明显交叉,代表指标间相互影响关系较大。对比图5、图6,可发现应用终端前、后都具有四个基础指标原点,但应用终端前线与线之间交叉明显,而应用终端后线与线之间保持相互独立状态。所以,可证明应用运动智能指标电子采集终端,可有效抑制指标间相互影响关系。
3.3 运动指标分类速度对比
完成指标间相互影响关系对比后,应用特殊测量方法完成运动指标分类速度对比。运动指标分类速度与BTE变量间存在反比关系,当BTE变量数值越大时,运动指标分类速度越慢,反之则越快,具体对比情况见图7。

分析图7可知,应用该终端前BTE指标,随着运动指标总量的增加,始终呈现上涨趋势。应用该终端后BTE指标,随着运动指标总量的增加,虽有小幅度增长,但始终保持在应用该终端前BTE指标下方。所以,可证明应用运动智能指标电子采集终端,指标分类处理速度得到明显提升。
4 结 语
通过硬件搭建与软件搭建相结合的方式,完成运动智能指标电子采集终端的设计与实现。利用模拟实验的方式,证明该终端确实具备极高的实用价值。
参考文献
[1] 马艳娜,唐华,柯红军.基于移动终端的遥感监测数据采集系统设计与实现[J].测绘与空间地理信息,2017,40(4):120?122.MA Yanna, TANG Hua, KE Hongjun. The system design and implementation of remote sensing data acquisition based on mobile terminal [J]. Geomatics & spatial information technology, 2017, 40(4): 120?122.
[2] 孙旭,杨印生,刘春霞,等.生鲜农产品供应链近场通信智能数据采集终端系统设计与开发[J].农业工程学报,2015,31(8):200?206.
SUN Xu, YANG Yinsheng, LIU Chunxia, et al. Design and development of near field communication intelligent data acquisition terminal system in fresh agricultural product supply chain [J]. Transactions of the Chinese Society of Agricultural Engineering, 2015, 31(8): 200?206.
[3] 任明秋,严革新,朱勇,等.复杂电磁环境下雷达抗干扰性能测试方法研究[J].仪器仪表学报,2016,37(6):1277?1282.
REN Mingqiu, YAN Gexin, ZHU Yong, et al. Study on radar anti?jamming performance test method in complex electromagnetic environment [J]. Chinese journal of scientific instrument, 2016, 37(6): 1277?1282.
[4] 牟柳,陈马强,田广.优秀网球运动员竞技能力模糊综合评价研究[J].西南师范大学学报(自然科学版),2017,42(3):61?65.MOU Liu, CHEN Maqiang, TIAN Guang. On fuzzy comprehensive evaluation of competitive ability of elite tennis players in China [J]. Journal of Southwest China Normal University (Natural science edition), 2017, 42(3): 61?65.
[5] 张光磊,齐红,贾鹤鸣.基于极点配置的智能体PID运动控制器参数优化[J].中山大学学报(自然科学版),2015,54(4):23?28.ZHANG Guanglei, QI Hong, JIA Heming. Parameter optimization of agent PID motion controller based on pole assignment [J]. Acta Scientiarum Naturalium Universitatis Sunyatseni, 2015, 54(4): 23?28.
[6] 姜艳秋,叶瑰昀,杨爱军.基于BP神经网络虚拟人运动控制方法的研究与实现[J].齐齐哈尔大学学报(自然科学版),2015,31(5):12?14.
JIANG Yanqiu, YE Guiyun, YANG Aijun. Research and implementation of virtual human motion control method based on BP neural network [J]. Journal of Qiqihar University (Natural science edition), 2015, 31(5): 12?14.
[7] 陈伟海,徐颖俊,王建华,等.并联式下肢康复外骨骼运动学及工作空间分析[J].机械工程学报,2015,51(13):158?166.
CHEN Weihai, XU Yingjun, WANG Jianhua, et al. Kinematics and workspace analysis of parallel lower limb rehabilitation exoskeleton [J]. Journal of mechanical engineering, 2015, 51(13): 158?166.
[8] 刘宏,柳林,张孟超.非刚性配准运动校正算法与双扇区重组对改善冠状动脉CTA图像质量的对比分析[J].影像诊断与介入放射学,2016,25(6):457?460.
LIU Hong, LIU Lin, ZHANG Mengchao. Improving the image quality of coronary CT angiography using a novel non?rigid registration based motion correction algorithm: in comparison with bi?sector reconstruction [J]. Diagnostic imaging & interventional radiology, 2016, 25(6): 457?460.
[9] 谢海员,纪滨,胡宏智,等.基于曲率特征猪腹式呼吸运动波形图建模方法[J].苏州科技学院学报(自然科学版),2016,33(3):66?70.
XIE Haiyuan, JI Bin, HU Hongzhi, et al. A waveform model based on curvature radius for swine′s abdominal breathing [J]. Journal of Suzhou University of Science and Technology (Natural science edition), 2016, 33(3): 66?70.
[10] 顾岩,何其昌,范秀敏,等.狭小空间虚拟人手臂装配运动规划及智能寻优[J].计算机集成制造系统,2016,22(6):1447?1455.
GU Yan, HE Qichang, FAN Xiumin, et al. Motion planning and intelligent optimization of virtual human arm for narrow space assembly simulation task [J]. Computer integrated manufacturing systems, 2016, 22(6): 1447?1455.
[11] PARESCHI F, ALBERTINI P, FRATTINI G, et al. Hardware?algorithms co?design and implementation of an analog?to?information converter for biosignals based on compressed sensing [J]. IEEE transactions on biomedical circuits & systems, 2016, 10(1): 149?162.
[12] SUN X, YANG Y, LIU C, et al. Design and development of near field communication intelligent data acquisition terminal system in fresh agricultural product supply chain [J]. Transactions of the Chinese Society of Agricultural Engineering, 2015, 31(8): 200?206.
[13] TAKAHASHI Y, HATANO H, MAIDA Y. Motion segmentation and recognition for imitation learning and influence of bias for learning walking motion of humanoid robot based on human demonstrated motion [J]. Journal of advanced computational intelligence & intelligent informatics, 2015, 19(4): 532?543.
