
基于维纳滤波的主动噪声控制实验研究
2018-05-14 09:09李志良苏佳高丽慧李星
科技风 2018年15期
关键词:高铁
李志良 苏佳 高丽慧 李星
摘 要: 随着工业的发展以及人们生活水平的不断提高,噪声污染是也逐渐引起了人们的关注。针对局部空间主动降噪问题展开研究。模拟高铁卧铺床搭建一个主动头靠降噪实验系统。在实验中,初级噪声是在高铁车厢内部录制的。实验一方面表明主动头靠系统的确可以对局部空间内的噪声进行控制,另一方面也表明了次级源数量的增加会产生更好的降噪效果。
关键词: 高铁;主动头靠;初级噪声;次级源
主动噪声控制(Active Noise Control,ANC),其基本原理是利用声波的相关干涉相消原理[1]。也就是通过人为产生一个与初级噪声幅度相等、相位相反的次级噪声,使之与初级噪声相互抵消从而达到降噪的目的。
与传统的被动噪声控制相比,主动降噪有以下优点:一是在低频段的噪声有很好的降噪效果[2];二是降噪设备体积小,特别适合局部空间的降噪;三是可以根据不同场合的噪声特性来设计专门的主动降噪设备。
在主动噪声控制中,相对于全局主动噪声控制,局部主动噪声控制在实际中应用更加广泛。到目前为止,在局部主动降噪中已有消声床及消声椅等应用[3]。主动噪声控制与被动降噪材料相结合可以达到全频段的降噪效果,这种组合降噪方式成为近几年来的研究重点[4]。
目前,虽然自适应主动控制降噪算法具有灵活性高和能够跟踪噪声特性变化的优点,但是因其对硬件要求较高,成本较大,而且在实际应用中稳定性问题还需要解决[5]。因此,实验中采用的控制方案是:通过离线辨识的方法来设计主控制器中滤波器的系数,使用固定系数的滤波器来实施控制。
1 主动控制算法
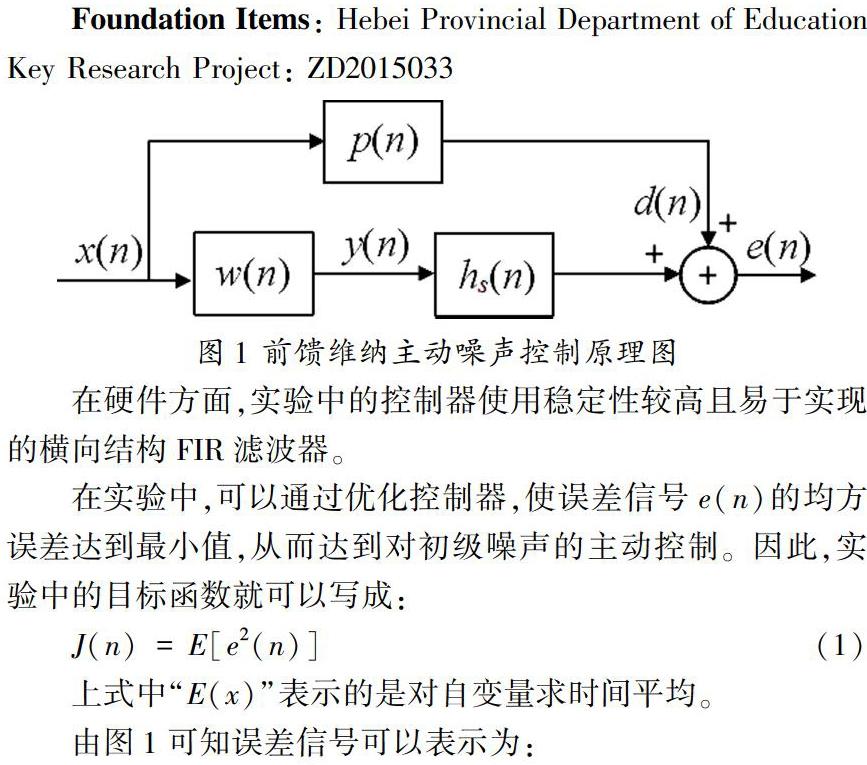
在高铁车厢内部录制的噪声基本上是统计平稳的,所以实验中使用的主动控制算法是前馈维纳滤波算法,其基本原理图如图1所示。其中x(n)为参考信号,是参考传声器在初级声场中采集到的噪声信号;w(n)为主控制器的传递函数;p(n)、hs(n)分别为初/次级通路的传递函数;y(n)为参考信号经过控制器处理得到的次级信号;d(n)为参考信号通过初级通路的传播得到的期望信号;e(n)为误差传感器接收到的误差信号。
在硬件方面,实验中的控制器使用稳定性较高且易于实现的横向结构FIR滤波器。
在实验中,可以通过优化控制器,使误差信号e(n)的均方误差达到最小值,从而达到对初级噪声的主动控制。因此,实验中的目标函数就可以写成:
由图1可知误差信号可以表示为:
作为初级噪声的高铁车厢内部噪声,其统计特性基本满足平稳,所以J(n)可以看作是滤波器的权系数矢量的二次型函数。因为矩阵R是正定对称的,因此,式(8)中J(n)存在一个唯一的最小值,求出的权系数矢量正好对应最佳滤波器系数的维纳解[6]:
在实验的过程当中,主要是利用式(9),根据参考信号和期望信号,通过MATLAB离线计算出滤波器的系数,并且通过上位机将系数导入到控制器中。在实验中,只要次级声源以及误差传声器,两者的数量没有发生变化,滤波器的系数就是固定的,因此称之为固定滤波器系数的控制方案。
2 实验内容
为了避免其它噪声以及初级噪声反射的干扰,因此本实验是选择在半消实验室中进行。在实验中,初级声源播放在高铁上录制的700Hz以下的低频宽带噪声。误差传感器用来模拟人耳听到的噪声,因此把两个传感器固定在人工头双耳处。次级声源使用四个惠威S3W-SE信号的音箱。实验使用这四个音箱,进行四通道主动控制。在实验的过程中,还要对人头的摆放做出调整,让人头左转30°、60°、90°,右转30°、60°、90°。
人头平躺时双通道控制降噪效果如图2所示。图2中的图(a)和图(b)分别为左耳(R1)和右耳(R2)处的控制效果图。在图3中,横坐标表示的是频率,单位(Hz);纵坐标表示的是误差传声器接收到声音信号的相对值,单位是分贝(dB);d1、d2分别为没有主动控制噪声时左右耳处误差传声器接收到的噪声,即左右耳处的期望信号;e1、e2分别为进行主动控制噪声后左右耳处误差传声器接收到的残余噪声,即左右耳处的误差信号。双通道主动噪声控制中的人头的各个摆放角度噪声控制的具体降噪量如表1所示。
从图2可以看出头靠系统主要是对700Hz以下的噪声有控制效果,高于这个700Hz时,基本没有控制效果,甚至是使噪声增加了。
3 实验数据分析与结论
通过对上表数据的分析,可以发现主动头靠系统对噪声有了一个明显的降噪效果,并且平躺时的降噪效果最好。一方面说明了实验中设计的局部主动噪声控制模型及算法的确可以达到一个较好的降噪效果,同时也说明了在主动噪声控制中,次级通路的改变也会对降噪效果产生一定的影响,降噪量的改变还与声波的传输特性有关。
参考文献:
[1]陈克安.有源噪声控制[M].北京:国防工业出版社,2014.
[2]S. M Kuo,D.R Morgan. Active noise control:a tutorial review[J].Proceedings of the IEEE,1999,87(6):943-973.
[3]Paul S.Booij, Arthur P. Berkhoff. Application of virtual sensors in three-dimensional broadband active noise control and the effects on the quiet zones [J].International Institute of Acoustics & Vibration,2011,52(1):421-435.
[4]Sen M Kuo,Dennis Morgan.Active Noise Control Systems:Algorithms and DSP Implementations [M].John Wiley & Sons,Inc,1996.
[5]Annea Barkefors, Mikael Sternad, Lars-Johan Brann..mark. Design and analysis of linear quadratic gaussian feedforward controllers for active noise control [J].IEEE Transactions on Audio, Speech and Language Processing,2014,22(12),1777-1791.
[6]Simon Haykin.自適应滤波器原理(第5版)[M].北京:电子工业出版社,2016.
猜你喜欢
文萃报·周二版(2022年18期)2022-05-11
共产党人(2021年1期)2021-01-28
七彩语文·低年级(2020年1期)2020-02-12
少年博览·小学低年级(2019年10期)2019-11-22
环球时报(2018-10-25)2018-10-25
中国铁路文艺(2018年4期)2018-09-20
小康(2016年24期)2016-12-23
浙江人大(2015年8期)2015-09-10
南方周末(2015-02-05)2015-02-05
小学生·多元智能大王(2014年9期)2014-08-28
