
高功率因数无电解电容电机驱动系统电流控制策略
2018-05-14 13:31张国柱徐殿国朱良红王高林霍军亚
电机与控制学报 2018年1期
张国柱 徐殿国 朱良红 王高林 霍军亚
摘 要:因成本與使用寿命上的优势,无电解电容电机驱动技术正逐步得到应用。然而,由于仍存在相电流幅值过大与弱磁控制不稳定的问题,直接影响了该技术的推广。为此,提出一种单相输入高功率因数无电解电容电机驱动的电流控制策略。通过调整交轴电流指令的轨迹,使驱动器输入侧具有高功率因数,且电机相电流峰值比以往方法有明显削减;对弱磁失控现象,提出基于交轴电压修正的弱磁控制方法。在变频空调压缩机控制系统上的实验验证了该电流控制策略的有效性。实验结果表明,该控制策略能在输入电流满足IEC谐波标准的前提下,使电机相电流峰值降低,并确保弱磁控制环路的稳定性。
关键词:电机控制;高功率因数;无电解电容驱动;电流控制策略
中图分类号:TM 351
文献标志码:A
文章编号:1007-449X(2018)01-0100-07
0 引 言
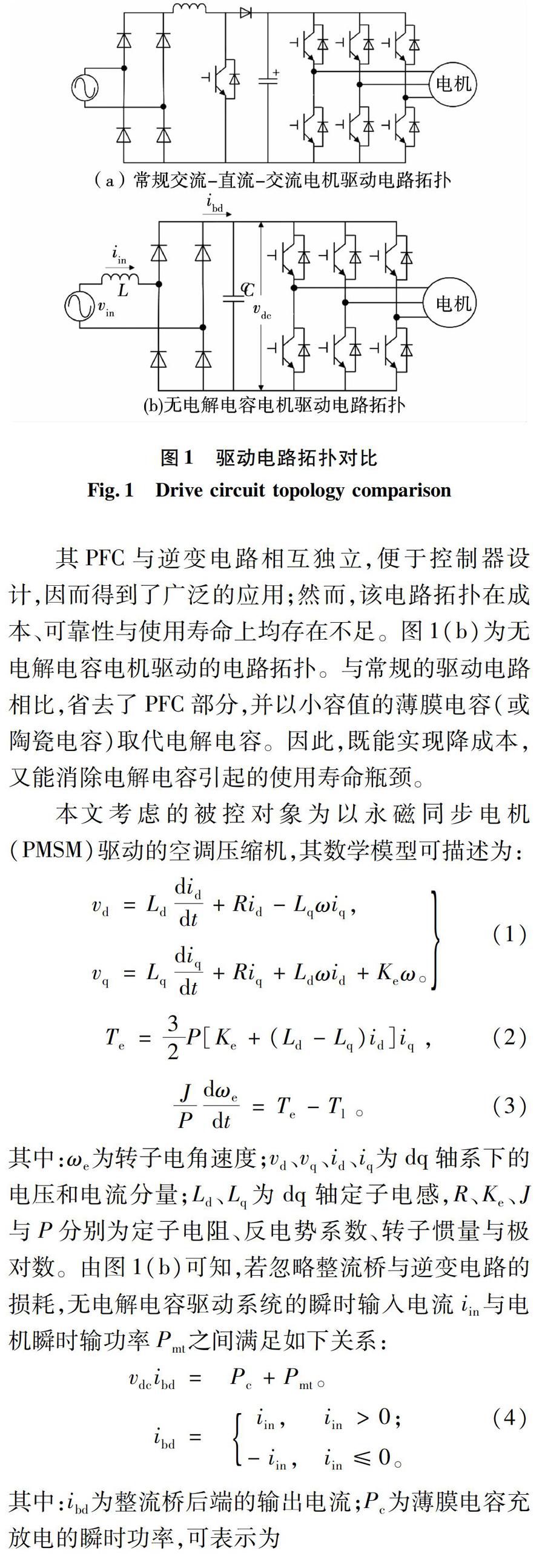
为实现永磁同步电机的矢量控制,并使输入侧具有高功率因数且满足电流谐波标准[1],电机驱动器常采用交流-直流-交流的变换方式。其中,交流-直流变换部分具有功率因数校正(PFC)电路,以提高输入侧功率因数并减小输入电流谐波;直流-交流变换部分通过逆变电路驱动电机运行。由于中间环节较多,因而成本较高,可靠性下降,且直流母线上电解电容的寿命限制了其使用年限。
为降低驱动电路的成本,提高可靠性并延长使用寿命,文献[2]提出了单相输入无电解电容驱动系统的基本结构,实现了从交流到交流的直接变换,减少了电路的中间转换环节。文献[2]还提供了一种基于直接转矩控制的输入电流正弦化控制方法。然而,由于未考虑电机瞬时功率与输入电流的匹配关系,因此难以得到期望的输入电流波形。文献[3]对输入电流与电机瞬时功率的匹配关系进行了详细分析,增加功率控制环路以调节电机的瞬时功率,并利用重复控制提升功率控制环路的动态性能,改善了输入电流的功率因数。文献[4]利用比例谐振控制器调节无电解电容驱动系统的功率控制环路。重复控制只对与电网频率成倍数的功率参考指令有效,比例谐振控制器对扰动抑制的有效范围只在电网频率附近,而单转子压缩机运行过程中存在明显的转速波动,瞬时功率指令存在多种频率成分,因此文献[3-4]中的方法并不适用。文献[5]提出一种基于电压补偿的瞬时功率控制方法,可显著降低输入电流的谐波成分;然而该方法施加的补偿电压将使电机电流偏离参考值,在恶劣工况下难以确保电机相电流值在允许范围以内。文献[3-5]的方法均加入了功率控制环路,不仅增加了控制器实现的难度,而且可能引起调速系统不稳定。
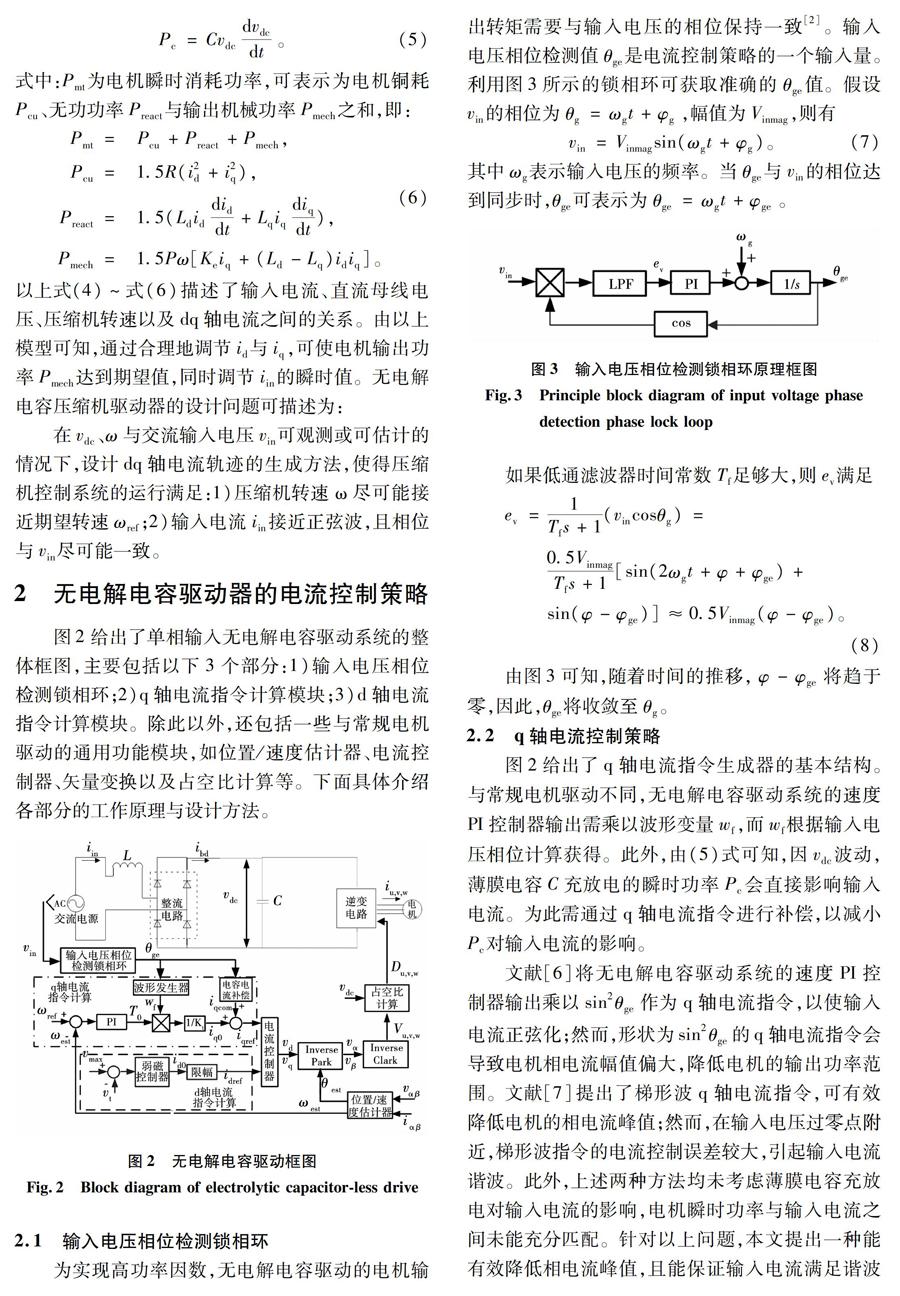
针对上述关键问题,本文提出一种无需功率控制环路的无电解电容压缩机控制方法。该方法通过合理调节dq轴电流指令,使输入电流波形满足谐波要求。由于不需要增加额外的功率控制环路,因此可保证调速系统的稳定性,且便于工程实现。此外,该方法的电流指令具有确定的形式,只要限制其幅值,便能有效防止因电流指令过大而引起的过电流故障。
1 模型建立与问题描述
常规的交流-直流-交流转换电机驱动器具有如图1(a)所示的电路拓扑。
3.2 d轴电流控制策略验证
为验证d轴电流控制策略的有效性,进行两种方法的对比测试。首先采用常规的弱磁控制方法,即令id0=-Kis[v1-vmax],并使压缩机从70 Hz加速到85 Hz;在T2时刻,目标转速达到85 Hz,并在后续运行过程保持该转速;在T3时刻,d轴电流控制策略切换为式(17)。为避免压缩机退磁,把退磁限制电流idemag设置为-13.5 A。图12给出该对比实验的电流波形。可见,采用常规的弱磁控制可能导致电流达到退磁限制值,弱磁环路出现了失控状态。而在T3时刻以后,由于切换至基于vq修正的弱磁控制,因而弱磁环路退出不可控的状态,最终收敛到-9 A附近。通过此对比实验可见,本文提出的d轴电流控制策略能有效避免无电解电容驱动在深入弱磁状态下的失控现象。
4 结 论
本文提出了一种无需功率控制环路的无电解电容压缩机控制方法。通过合理地调节dq轴电流指令,实现电机的调速控制,且输入电流波形满足谐波要求。由于不需要增加额外的控制环路,因此可确保系统的稳定性,且便于实现。通过调整q轴电流指令的形状,使电机的相电流峰值比以往方法有明显削减。针对无电解电容驱动深度弱磁下环路可能出现的失控现象,提出了一种基于vq修正的弱磁控制方法。通过在变频空调上的实验表明,该方法不但能实现电机相电流峰值的有效削减,且能使输入电流满足谐波标准,并能避免弱磁不稳定现象。
参 考 文 献:
[1] Standard I E C. 61000-3-2: 2004, Limits for harmonic current emissions[J]. International Electromechanical Commission. Geneva, 2004.
[2] TAKAHASHI I, HAGA H. Inverter control method of IPM motor to improve power factor of diode rectifier[C]//Power Conversion Conference, 2002. PCCOsaka 2002. Proceedings of the. IEEE, 2002, 1: 142-147.
[3] INAZUMA K, UTSUGI H, OHISHI K,et al. Highpowerfactor singlephase diode rectifier driven by repetitively controlled IPM motor[J]. IEEE Transactions on Industrial Electronics, 2013, 60(10): 4427.
[4] WANG G, ZHAO N, QI J, et al. High power factor control of IPMSM drive system without electrolytic capacitor[C]//International Power Electronics and Motion Control Conference, 2016: 379-383.
[5] SON Y, HA J I. Direct power control of a threephase inverter for grid input current shaping of a singlephase diode rectifier with a small DClink capacitor[J]. IEEE Transactions on Power Electronics, 2015, 30(7): 3794.
[6] JUNG H S, CHEE S J, SUL S K, et al. Control of threephase inverter for AC motor drive with small DClink capacitor fed by singlephase AC source[J]. IEEE Transactions on Industry Applications, 2014, 50(2): 1074.
[7] LAMSAHEL H, MuUTSCHLER P. Permanent magnet drives with reduced dclink capacitor for home appliances[C]//Industrial Electronics, 2009. IECON'09. 35th Annual Conference of IEEE. IEEE, 2009: 725-730.
[8] 王高林, 楊荣峰, 于泳, 等. 内置式永磁同步电机转子初始位置估计方法[J]. 电机与控制学报, 2010, 14(6): 56.
WANG Gaolin, YANG Rongfeng, YU Yong,et al.Initial rotor position estimation for interior permanent magnet synchronous motor[J].Electric Machines and Control, 2010, 14(6):56.
[9] 李旭春, 王倩, 马少康. 带离线参数辨识的降阶观测器PMSM无位置传感器控制[J]. 电机与控制学报, 2017, 21(1):1.
LI Xuchun, WANG Qian , MA Shaokang. Reduced order observer based PMSM sensorless control algorithm with parameters identification at standstillis[J], Electric Machines and Control, 2017, 21(1):1.
[10] BOLDEA I, PAICU M C, ANDREESCU G D. Active flux concept for motionsensorless unified AC drives[J]. IEEE Transactions on Power Electronics, 2008, 23(5):2612.
(编辑:张 楠)
