
无刷直流电机半实物实时仿真及测试
2018-05-14 13:31高瑾徐秋霞董召强
电机与控制学报 2018年4期
高瑾 徐秋霞 董召强


摘 要:研究提高无刷直流电机(BLDCM)通用性的方法,基于电机和逆变器HIL建模的原理,设计硬件在环 (HIL)实时仿真实验。采用标幺化建模方法,避免由于仿真电机的更换所造成的数据溢出;建立电机HIL模型,使用实物电机中的非理想反电势波形,模拟实物电机的输出;建立逆变器HIL模型,增加续流和关断过程,适用于多种运行状态;最后,搭建了电机参数实时发送上位机平台,方便电机参数的修改和实时加载,防止定点数重复计算,提高建模效率。将HIL平台与全实物实验平台进行了实验对比,结果表明,HIL实时平台能准确仿真出不同反电势波形的BLDCM在不同控制方式下的运行过程,在实时性、通用性和精度方面符合需求。
关键词:无刷直流电机;硬件在环实时仿真;标幺化建模;多种运行状态;非理想反电势
中图分类号:TM 351
文献标志码:A
文章编号:1007-449X(2018)04-0008-08
Abstract:Based on the principle of motor and inverter HIL modeling,the simulation of a brushless DC motor (BLDCM) with a hardware in the loop (HIL) is studied to improve the versatility.Firstly,the methodology of per-unit modeling that avoids data overflow caused by the change of motors enhanced the universality of the model.Secondly,non-ideal back electromotive force (EMF) shapes of physical motor was employed in the real-time BLDCM model to simulate the output of the physical motor.Next,the inverter HIL model,considering the freewheeling and shutting down process,was suitable for all types of operation conditions.Finally,a platform for delivering parameters was created to modify the motor parameters and change real-time load online conveniently,which avoid the repeated fixed point computation of parameters and improves modeling efficiency.Comparing the HIL platform and full physical experiment platform under same conditions,the results show that the HIL platform can simulate different types of operations of BLDCM with different kinds of back EMF waveforms and thus meet the requirements in terms of real-time,versatility and accuracy.
Keywords:brushless DC motor; hardware in the loop; per-unit modeling; a variety of operational status; non-ideal back EMF
0 引 言
無刷直流电机(brushless DC motor,BLDCM)以其体积小、可靠性好等优点得到了广泛的应用[1]。BLDCM理想的相反电势是平顶波宽度为120°的梯形波[2-3]。但是,绕组反电势的畸变对电机的性能有很大影响[4],BLDCM的实际反电动势很难实现理想的梯形波[5],反电势的实际形状会直接影响仿真效果。因此研究电机的实际反电势,可以提高HIL建模的准确性。通用的HIL建模法有离线查表法,实现简单,延时短,可以通过实测法或有限元分析法生成形状函数查找表查找反电势系数[6]。
与MATLAB/Simulink、PSIM等较为成熟的离线仿真软件不同的是,硬件在环(hardware in the loop,HIL)用等效实时模型取代研究对象(电机与逆变器),dsPACE作为控制器使用。HIL模型的动态性与实时性更接近实物电机的实际情况,可应用于新算法开发以及实验室难以满足的极限工况甚至容错故障下的研究[7-9]。近些年,国内外关于电机HIL半实物实时仿真技术的研究主要集中于提高大功率电机的通用性和建模精度两方面。一方面,从提高电机模型的通用性来讲,文献[10]提出了考虑电感非线性的车用内置式永磁同步电机(IPMSM)的d-q轴模型;文献[11]建立了考虑饱和效应的感应电机模型;文献[12]提高了永磁电机和直流电机建模的通用性。另一方面,建立HIL模型,可以改善BLDCM的模型精度,文献[13]实现了基于FPGA(现场可编程门列)的BLDCM的HIL建模,电机反电势是理想梯形波;文献[14]利用从静态有限元分析(FEA)中获得的无刷直流电机参数的查找表,根据实时相电压信号改变无刷直流电动机的状态,以提高精度,通过使用该方法,扰动条件下的仿真性能得到提高,获得更快的运算速度。
现场可编程门阵列(field programmable gate array,FPGA)以内部硬件并行结构和硬件电路的可重塑性,能稳定地快速计算,超低延时[15]等特性,常作为HIL建模的载体[16]。
现有的半实物实时仿真技术的无刷直流电机模型计算周期一般为14 μs[14],与之相比,本文所建立的HIL模型的数据处理兼顾了实时模型对计算速度和精度的要求,计算步长为1 μs,延时为1.2 μs,实现了超低延时。当前的仿真技术仅考虑理想反电势模型[13],而本文在FPGA上建立了考虑实际反电势波形的BLDCM标幺化HIL模型,包含电机和逆变器两部分。以额定数据为基值,将电量和物理量标幺化,将电机反电势系数以形状函数查找表描述,适用于不同功率等级、各种反电势波形(正弦波、梯形波、任意波形)的BLDCM,提高通用性及改善精度。同时,与传统的逆变器实时仿真只考虑上下管状态相反的情形相比[17],逆变器HIL建模考虑了续流过程和桥臂上下管长时间关断的情况,利用状态方程模拟不同工况下的端电压输出,更加逼近现实。
全文分为五部分,第一部分对标幺化BLDCM建模进行理论推导,第二部分为建模具体实现及分析,第三部分设计通信上位机,第四部分为实物电机和HIL模型的实验对比,最后为结论。
1 BLDCM的反电势形状函数及标幺化建模
1.1 BLDCM的标幺化数学模型
图 1 是BLDCM等效电路及三相全桥主电路。三相电压方程为
在运动控制系统中,负载转矩可分为位能性负载TL1和反抗性负载TL2。为了与真实情况相符,电机适应n-T四象限运行,建模加入两种负载,在加载时考虑外部转矩类型,将另一种转矩置零,如图2所示。
对电角速度积分即可得到位置信号。输出位置信号有三路光编信号A、B、Z,三路霍尔信号与旋转变压器信号,可根据实际电机位置传感器进行选择输出。
1.2 反电势形状函数的获取
要提高电机建模精度,需要获取精确反电势形状函数。文献[19]利用有限元分析得出电机的反电势系数与电角度之间的关系,本文利用此方法得到反电势形状函数一维查找表,节约计算资源。
1.3 考虑关断相的逆变器建模
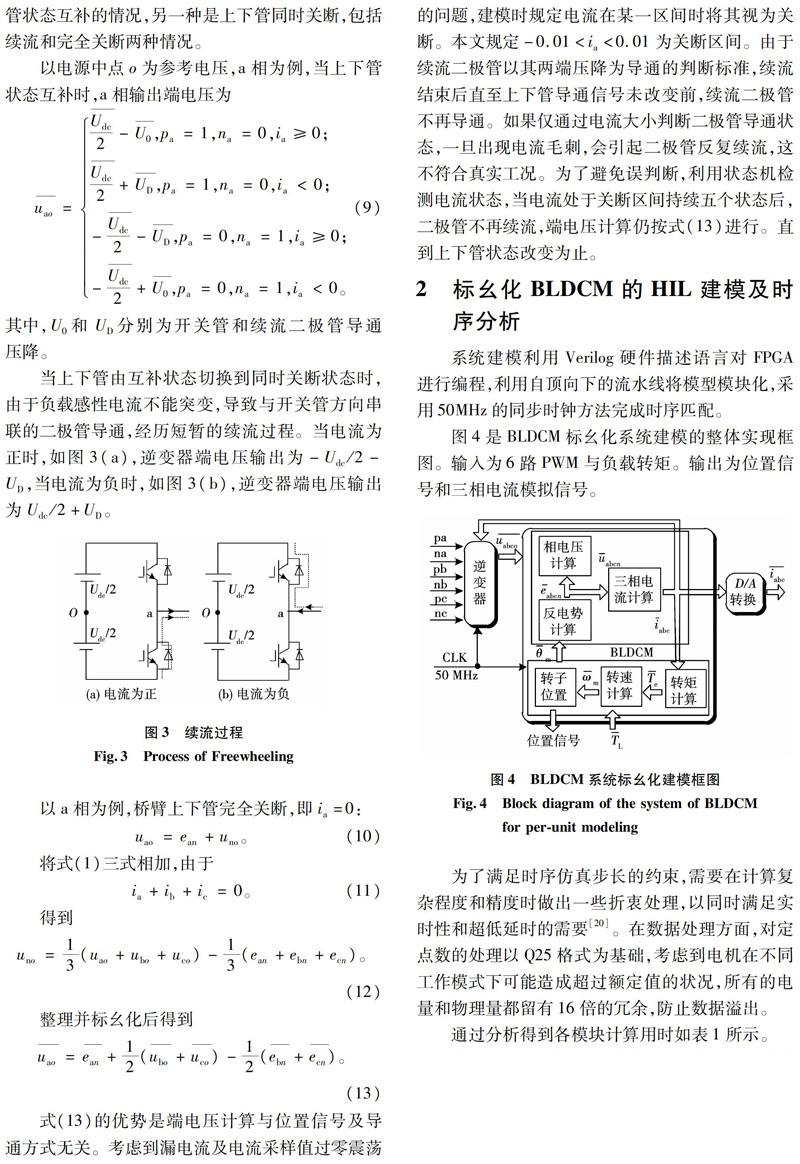
逆变器HIL建模考虑到两种情况,一种是上下管状态互补的情况,另一种是上下管同时关断,包括续流和完全关断两种情况。
当上下管由互补状态切换到同时关断状态时,由于负载感性电流不能突变,导致与开关管方向串联的二极管导通,经历短暂的续流过程。当电流为正时,如图3(a),逆变器端电压输出为-Udc/2-UD,当电流为负时,如图3(b),逆变器端电压输出为Udc/2+UD。
式(13)的优势是端电压计算与位置信号及导通方式无关。考虑到漏电流及电流采样值过零震荡的问题,建模时规定电流在某一区间时将其视为关断。本文规定-0.01 2 标幺化BLDCM的HIL建模及時序分析 系统建模利用Verilog硬件描述语言对FPGA进行编程,利用自顶向下的流水线将模型模块化,采用50MHz的同步时钟方法完成时序匹配。 图4是BLDCM标幺化系统建模的整体实现框图。输入为6路PWM与负载转矩。输出为位置信号和三相电流模拟信号。 为了满足时序仿真步长的约束,需要在计算复杂程度和精度时做出一些折衷处理,以同时满足实时性和超低延时的需要[20]。在数据处理方面,对定点数的处理以Q25格式为基础,考虑到电机在不同工作模式下可能造成超过额定值的状况,所有的电量和物理量都留有16倍的冗余,防止数据溢出。 通过分析得到各模块计算用时如表1所示。 在工程应用中,电机控制PWM频率一般为10 kHz~20 kHz[21],由表1可知,从逆变器输入六路开关信号,到电机输出电流和霍尔信号,计算延时1.2 μs,电流更新时间是1 μs,这些数量级远小于控制周期,满足HIL的实时需求。 3 LabVIEW上位机界面设计 为了方便电机参数的输入,避免在对不同参数建模时反复的定点数计算,需要建立一个较人性化的定点数计算系统与FPGA实现数据通信。本文利用LabVIEW的图像化语言开发了BLDCM硬件在环参数发送上位机程序,同时利用FPGA内部软核建立Nios II工程,利用较便捷的C程序开发,实现电机参数通信。 该界面主要包括以下四个部分: 1)电机参数发送:实现电机参数标幺化和定点化,在上位机上输入电机参数,即可完成电机参数的计算。 2)反电势形状函数设置:生成查找表以及显示单个周期的反电势系数形状,反电势波形可以选择由平顶波宽度任意的理想梯形波、正弦波或从外部文件导入查找表。 3)转矩设置:有反抗性负载和位能性负载两种,选择一种转矩后,另一种转矩自动清零。 4)串口设置:设置串口。 4 实验对比 4.1 实验平台 为了对比与实物电机的差异,搭建两组实验平台。一组是实物电机平台(图5),一组是HIL平台(图6)。实物电机平台包括BLDCM,磁粉制动器、控制板、驱动板、稳压电源和直流可调电压等部分。其中稳压电源输出为24 V和5 V两路电压,分别供电给逆变器和控制板。控制板的核心单元是DSP,型号为Freescale MC8257。HIL平台包括FPGA开发板、接口板、dSPACE DS1103控制器、上位机等部分。其中FPGA开发板以型号为Altera EP3C40Q240为核心。D/A转换芯片为AD9765。与实物电机相同,实时模型输入为6路PWM信号,输出为经过D/A转换的三相电流信号和三相霍尔位置信号。对实时模型的控制器为dSPACE 1103,与FPGA开发过接口板连接,通过采集三相霍尔信号和相电流信号,经过dSPACE控制器内部控制算法处理,输出6路PWM控制信号。
对于反电势为正弦波的BLDCM,采用id=0控制;对于反电势为准梯形波的BLDCM,采用不同导通方式的梯形波控制。在相同工况下,对比实物电机和HIL电机模型的电压电流数据。结果表明,本文逆变器建模能准确模拟续流过程和不同导通方式下的电压输出。电机HIL建模在拓宽通用性的同时,具有较高的精度。同时,改变电机模型无需重新建模,只需在上位机输入电机参数发送即可,缩短了开发周期。
4.2 实验验证
为了验证HIL实时模型性能,以实物电机为原型,测试不同反电势形状函数能否均适应HIL模型。两台实物电机在设计时,对反电势波形进行了不同设计,一台为标准正弦波,另一台为准梯形波。实物电机的反电势形状函数如图7所示。
两台电机除反电势波形不同之外,其他主要参数完全相同,如表2所示。
下面进行三组对比实验,通过对实验波形的分析,验证建立的HIL模型的有效性。
4.2.1 正弦波电机的对比实验
反電势为正弦波的BLDCM也称为隐极式永磁同步电机(permanent magnet synchronous motor,PMSM),在中小功率场合得到广泛应用。实验首先对这类电机进行数据对比。由于小型磁粉制动器的散热能力有限,对比实验采用小负载和低转速运行。
将图5上位机中反电势形状函数改成正弦波。完成正弦波BLDCM的HIL建模。与实物电机一致,控制方式为id=0,矢量控制逆变桥上下管状态互补,开关频率为10 kHz,同时加入3 μs的死区时间。当转速稳定在1 200 r/min,负载转矩为0.15 N·m时,得到两平台下的A相电流对比波形,如图8所示。
加入死区时间可以避免上下管重叠导通造成短路现象,但由于死区的存在,输出电压理论上也与负载电流状态有关,如果不进行补偿,输出电压会产生一定的畸变,进而影响输出电流。由于实物电机控制核心DSC具有自动死区补偿功能,因此生成的电流波形正弦度更好。然而HIL模型控制器dSPACE 1103没有此功能,电流会引起一定的过零缓冲。HIL平台的电流波形有此现象,证明了本文逆变器建模适用于同一桥臂上下管互补且留有死区时间的情况。
对比电流峰值,实物电机为3.13 A。HIL模型为3.09 A,这是因为未补偿死区时,电压有效值减小造成电流有效值略有下降。
4.2.2 梯形波电机的对比实验
为了验证更多不同导通状态下的HIL模型的工况。对于反电势为类梯形波的BLDCM采用两两导通控制,即需要某一桥臂上下管同时关断。实物电机控制核心为DSP,其PWM采用独立控制即可完成此目标,开关频率仍为10 kHz。而HIL平台控制器dSPACE 1103的PWM接口输出只有上下管互补状态,因此实现算法时,只能采用内部生成三角载波结合比较器生成经过GPIO口输出PWM脉冲。这样会使PWM频率有所下降(4 kHz),在相同算法下,dSPACE的控制效果不如DSP。
将实物电机换成反电势为类梯形波的BLDCM,同时改变HIL模型内部的反电势形状函数查找表,得到相应的BLDCM模型。
PWM调制方法使得输出电流波形接近类梯形波,所以本文使用PWM调制方法。根据上管或下管导通控制方式的不同,以及在120°导通区间内的PWM切换方式,PWM调制分为五种方式[22],即H_ON _L_PWM(上管120°内恒导通,下管120°内PWM调制),H_ PWM _L_ ON(上管120°内PWM调制,下管120°内恒导通),H_ PWM _L_PWM(上下管120°内均PWM调制),PWM _ON(上下管120°内前60°PWM调制,后60°恒导通),ON _ PWM(上下管120°内前60°恒导通,后60°PWM调制)。
实验首先测试较简单的H_PWM_L_ON导通方式[23],控制实物电机和HIL系统稳定运行在1 200 r/min,对电机加载相同负载,以0.1 N·m为例,用示波器采集a相桥臂上下管PWM信号、输出端电压和相电流信号,得到如图9所示的对比波形。
图9中椭圆虚框部分是逆变桥上下管的关断过程,由于电流不能突变,需要经历续流到完全关断,当电流从负值到0时,如图3(a)所示,此时逆变器输出相对电源负极的端电压为Udc+Ud≈24.6 V,略大于直流电压,两个平台输出数据相同。当电流从正值到0时,如图3(b)所示,逆变器输出相对电源负极的端电压为-Ud≈-0.6 V。当续流二极管完全关断后,端电压跟随负载电压变化。由于a相端电压输出在a相反电势的基础上,同时也受b、c两相PWM斩波变化影响,输出电压会在反电势基础上有一定跳变。
由图9可知,HIL平台准确模拟了续流、斩波、逆变桥上下管完全关断等多种情况下的电压电流输出。同时,两个平台输出电流峰值都是2.1 A。
4.2.3 梯形波电机不同斩波方式的对比实验
在采用两相控制模式的BLDCM众多斩波方式在中,PWM_ON_PWM[24]导通方式,即在120°导通区间内,前30°和后30°为PWM调制,中间60°部分恒通,可更平滑地完成续流。同时相比于H_PWM_L_ON,上下管开关损耗也更均匀。在PWM_ON_PWM导通方式下,进行相同的对比实验,在1 200 r/min转速下加0.15 N·m负载转矩。得到实物平台和HIL平台的实测波形对比,由图10可知,逆变器端电压输出完成了各种工况的模拟,同时梯形波电流峰值均为3.05 A 。证明了HIL模型同样适用于PWM_ON_PWM导通。
上述实验表明,本文提出的HIL建模方法适用于不同反电势波形下的不同电机。采用H_PWM_L_ON和PWM_ON_PWM这两种导通方式作为对比,可以反映出更多种工况下实物电机和实时仿真模型的对比度。无论是逆变器建模还是BLDCM建模,HIL模型都很好地反映了实物电机运行过程中的动态和稳态过程。
5 结 论
本文对BLDCM系统HIL半实物实时仿真进行了分析,得到如下结论:
1)为提高精度,须考虑反电势的非理想形状。本文将实际电机反电势系数以一维查找表的形式实现。采用标幺化建模方式,并留有±16裕量,保证了不同参数下BLDCM数据的正确处理。因而能实现不同参数及各种反电势波形的BLDCM的开发与性能测试;
2)考虑了位能性负载与反抗性负载,可实现四象限运行。
3)逆变器HIL建模考虑到了续流和上下管同时完全关断。
4)基于LabVIEW开发了数据发送、前处理即实时检测系统,方便发送电机参数以及电机实时加载,避免了定点数的人工重复计算。
5)HIL平台与全实物平台进行了实验对比,从对比结果可知,BLDCM的HIL实时仿真系统在实时性、通用性和精度方面符合需求。
参 考 文 献:
[1] 薛晓明,杨长江.无刷直流电机建模研究[J].电机与控制学报,2009,13(6):874.
XUE Xiaoming,YANG Changjiang.Study of modeling for brushless DC motor Drivers [J].Electric Machines and Control,2009,06:874.
[2] 邱建琪,史涔溦,林瑞光,等.三相三状态无刷直流电机的系统模型及其仿真[J].电机与控制学报,2001,5(4):217.
QIU Jianqi,SHI Cenwei,LIN Ruiguang,et al.System model of three-phase unipolar-driven BLDCM and its simulation[J].Electric Machines and Control,2001,5(4):217.
[3] 紀志成,沈艳霞,姜建国.一种新型的无刷直流电机调速系统的模糊PI智能控制[J].电机与控制学报,2003,7(3):248.
JI Zhicheng,SHEN Yanxia,JIANG Jianguo.A novel fuzzy PI intelligent control method of BLDCM speed servo system[J].Electric Machines and Control,2003,7(3):248.
[4] 刘刚,肖烨然,孙庆文等.基于改进反电势积分的永磁同步电机位置检测[J].电机与控制学报,2016,2(2):36.
LIU Gang,XIAO Yeran,SUN Qingwen,et al.Position detection of PMSM based on the improved back-EMF integration method[J].Electric Machines and Control,2016,2(2):36.
[5] 潘雷,孙鹤旭,王贝贝等.基于单神经元自适应PID的无刷直流电机反电势与磁链观测及无位置传感器直接转矩控制[J].电机与控制学报,2014,18(5):69.
PAN Lei,SUNHexu,WANG Beibei et al.Back-EMF and flux observation based on single neuron adaptive PID and sensorless direct torque control for brushless DC motor[J].Electric Machines and Control ,2014,18(5):69.
[6] FANG Jiancheng,LI Haitao,HAN Bangcheng.Torque ripple reduction in BLDC torque motor with non-ideal back EMF[J].IEEE Transactions on Power Electronics,2012,27(11):4630.
[7] Hanan M HABBI,黄苏融,高瑾等.基于交叉耦合效应的车用内置式永磁电机转子位置估计[J].中国电机工程学报,2012,32(15):124.
Hanan MHABBI,HUANG Surong,GAO Jin,et al.Robust sensorless rotor position estimation of IPM in EV cooperation with cross saturation effects[J].Proceedings of the CSEE,2012,32(15):124.
[8[ 夏长亮,方红伟.永磁无刷直流电机及其控制[J].电工技术学报,2012,27(3):25.
XIA Changliang,FANG Hongwei.Permanent-magnet brushless DC motor and its control[J].Transactions Of China Electrotechnical Society,2012,27(3):25.
[9] SHAHBAZI M,POURE P,SAADATE S,et al.FPGA-based reconfigurable control for fault tolerant back-to-back converter without redundancy[J].IEEE Transactions on Industrial Electronics,2013,60(8):3360.
[10] 高瑾,黄洋,宋石阳,等.车用电机硬件在环实时仿真与测试平台[J].电工技术学报,2014,29(11):99.
GAO Jin,HUANG Yang,SONG Shiyang,et al.Hardware in loop real-time simulation and test bench for electrical vehicle[J].Transactions of China Electrotechnical Society,2014,29(11):99.
[11] HERRERA L,LI C,YAO X,et al.FPGA-based detailed real-time simulation of power converters and electric machines for EV HIL applications[J].IEEE Transactions on Industry Applications,2015,51(2):1702.
[12] ROSHANDEL TAVANA N,DINAVAHI V.A general framework for FPGA-based real-time emulation of electrical machines for HIL applications[J].IEEE Transactions on Industrial Electronics,2015,62(4):2041.
[13] SCHULTE T,BRACKER J.Real time simulation of BLDC motors for hardware in the loop applications incorporating sensorless control[C]//International Symposium on Industrial Electronics,IEEE,2008:2195-2200.
[14] BO Z,XU J.Interpolation method in hard ware in the loop simulation for brushless DC motor[C]// Intelligent Control and Automation (WCICA),IEEE on 11th World Congress,2014:5852-5857.
[15] MATAR M,IRAVANI R.Massively parallel implementation of AC machine models for FPGA-based real-time simulation of electromagnetic transients[J].IEEE Transactions on Power Delivery,2011,26(2):830.
[16] WANG Wentao,SHEN Zhuoxuan,VENKATA Dinavahi.Physics-based device-level power electronic circuit hardware emulation on FPGA[J].IEEE Transactions on Industrial Informatics,2014,10(4):2166.
[17] LUO G,LIU X W,SONG K,et al.DSPACE based Permanent Magnet Motor HIL simulation and test bench[J].IEEE International Conference on Industrial Technology,2008,1.
[18] HASANZADEH A,EDRINGTON C S,STROUPE N,et al.Real time emulation of a high-speed microturbine PMSG using multiplatform HIL realization[J].IEEE Transactions on Industrial Electronics,2014,61(6):3109.
[19] FAZIL M,RAJAGOPAL K R.Nonlinear dynamic modeling of a single-phase permanent-magnet brushless DC motor using 2-D static finite-element results[J].IEEE Transactions on Magnetics,2011,47(4):781.
[20] FARUQUE M O,DINAVAHI V.Hardware in the loop simulation of power electronic systems using adaptive discretization[J].IEEE Transactions on Industrial Electronics,2010,57(4):1146.
[21] CHOI C,LEE W.Analysis and compensation of time delay effects in hardware-in-the-loop simulation for automotive PMSM drive system[J].IEEE Transactions on Industrial Electronics,2012,59(9):3403.
[22] 周美蘭,高肇明,吴晓刚,等.五种PWM方式对直流无刷电机系统换相转矩脉动的影响[J].电机与控制学报,2013,17(7):15.
ZHOU Meilan,GAO Zhaoming,WU Xiaogang,et al.Influence of five kinds of PWM on commutation torque ripples in BLDCM control system[J].Electric Machines and Control,2013,17(7):15.
[23] 张相军,陈伯时.无刷直流电机控制系统中PWM调制方式对换相转矩脉动的影响[J].电机与控制学报,2003,7(2):87.
ZHANG Xiangjun,CHEN Boshi.The different influences of four PWM modes on commutation torque ripples in brushless DC motor control system[J].Electric Machines and Control,2003,7(2):87.
[24] 陈健,于慎波.无刷直流电机PWM_ON_PWM调制方式转矩特性研究[J].电机与控制学报,2016,20(8):48.
CHEN Jian,YU Shenbo.Torque characteristic of brushless DC motors by PWM_ON_PWM modulation[J].Electric Machines and Control ,2016,20(8):48.
(编辑:刘素菊)
