
无人机航测技术在高速公路带状地形图测绘中的应用
2018-05-14 08:37:35魏林金
现代测绘 2018年2期
魏林金
(江西省交通设计研究院有限责任公司,江西 南昌 330052)
0 引 言
地形图是公路勘察设计中必不可少的资料。目前,大比例尺公路带状地形图测量方法主要有全站仪测量、GPS RTK测量以及传统航空摄影测量法。全站仪测量和GPS RTK测量需要投入较多人力、物力,在地形复杂、植被茂密、建筑密集地区难以施测,且测量周期长,进而导致工程效率低、成本高。传统航空摄影测量虽然技术成熟、应用广泛,但对天气和机场条件的依赖性大、成本较高、摄影周期较长[1]。
近年来,轻型无人机(UAV)技术得到了较快发展,基于无人机平台的航测技术已有较强优势。由于无人机具有机动灵活、影像分辨率高、现势性强、使用成本低等特点,其在测绘行业的应用得到日益关注。本文通过实例阐述了无人机航测技术在1∶2 000地形图测绘中的应用情况以及相关注意事项,为无人机航测技术在公路带状地形图测绘中的应用提供生产实践经验。
1 无人机航测系统介绍
由飞行器系统、测控及信息传输系统、信息获取与处理系统、保障系统4个部分构成了无人机空间信息采集完整的工作平台。用于航测的无人机主要有固定翼无人机和旋翼无人机:固定翼无人机续航时间长、载重量大,适合大面积、远距离测绘任务;旋翼无人机续航时间短、载重量适中、具有可悬停优点,适合小范围、定点的测绘任务。
江西省交通设计研究院有限责任公司(以下简称设计院)承接了一条全长约80 km的拟建高速公路1∶2 000带状地形图测绘任务。结合公路地形图带状分布特点,此次航测使用了IRSA(中遥)Ⅱ型固定翼无人机(表1)。

表1 IRSA Ⅱ型无人机技术参数
此次搭载的航测相机为尼康D800,像幅大小为7 360×4 912,相机焦距为35 mm,像元分辨率为4.9 um,有效像素为3 630万,快门速度1/8 000 s。相机使用前经检校,获取了内方位元素和构像畸变校正系数等参数,以供后续影像数据处理使用。结合本次航飞区域情况及1∶2 000地形图精度要求,在保证飞行质量及效率前提下,设计摄影比例尺约1∶20 000,相对航高700 m,像片航向重叠度80%,旁向重叠度60%,像片倾斜角≤5°(个别最大≤12°),像片旋偏角≤15°。
2 生产技术流程
无人机航测的生产技术流程由航飞设计开始,采用“外—内—外—内”方式进行作业(图1)。
(1)利用无人机完成航空摄影后,通过外业进行像片控制测量。
(2)利用像控资料和相应航摄资料进行空中三角测量、立体测图。
(3)依据内业测绘成果完成外业调绘和补测。
(4)根据外业补测调绘完成成果编辑,制作DEM和DOM,汇总成果提交。
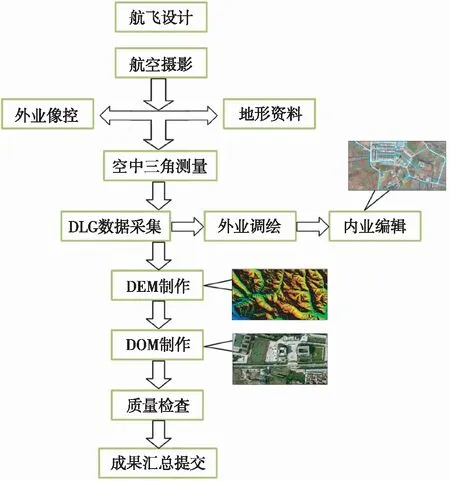
图1 无人机航测生产技术流程
3 应用实例
3.1 摄区概况
项目作业区位于江西省西北部,地貌有低山、丘陵和岗地、盆地及冲洪积河谷等,且以丘陵和岗地两者居多,地形起伏较大,部分地区树林密集,通视情况较差,沿线最高海拔约668 m,最低海拔约76 m。作业区属亚热带季风气候区,气候温和、四季分明、阳光充足、雨量充沛,年降水量的40%—50%集中在第二季度。
拟建高速公路推荐路线全长约80 km,设计标准为双向四车道,设计速度80 km/h,路基宽度24.5 m。作业范围是依据设计院提供的1∶50 000路线总体方案布置图中推荐线和比较线两边各200 m宽度内的区域。本任务包括使用无人机对摄区约200 km2区域进行地面分辨率优于0.2 m的数码航空摄影,并进行约42 km2区域的1∶2 000数字线划图DLG制作。
3.2 无人机航空摄影
根据无人机的作业能力和路线走向进行航线设计,共设计飞行7个架次,每个架次根据线路测量宽度要求飞行若干条航线。在每个架次飞完后及时检查影像拍摄质量,需按原设计要求及时补摄出现的相对漏洞和绝对漏洞。对不影响内业加密模型连接的相对漏洞,可只在漏洞处补摄,补摄航线的长度应超出漏洞之外1条基线。控制航线如其本身出现局部相对漏洞或其他缺陷,在不影响整条航线内业加密选点和模型连接的情况下可不补摄。凡需要补摄时,整条航线应重摄(图2)。
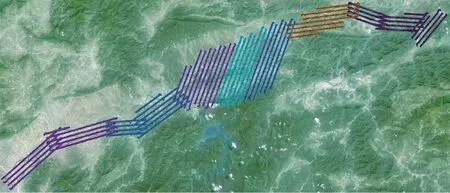
图2 无人机航线示意图
3.3 像片控制点布设与测量
像控点布设采用区域网布点法,全测区按飞行架次与地形条件划分为若干网区。对两条及两条以上平行航线布设平高控制点,每对像控点相距不超过4条基线,且分布在标准点位处。在不规则区域网中,为提高像控点加密精度,在区域网的凹角处增补高程点,凸角处增补平高点。当凹凸角之间距离超过2条基线时,凹角处亦布置平高点(图3)。

图3 不规则区域网布点
测区内已建立四等GPS控制网,像控点联测采用GPS实时动态定位(RTK)方法进行测定。考虑到测区地形较为复杂,为保证加密点质量,对高程控制点也需测定其平面坐标。
3.4 空中三角测量与立体测图
本次空三加密使用适普的Virtuozo AAT自动空中三角测量软件和PATB软件。Virtuozo AAT软件除了半自动量测控制点以外,其他所有作业(包括内定向、加密点选取、加密点转点、相对定向、模型连接、区域网构建以及加密点成果整理等)都可自动完成。PATB是目前世界上应用最为广泛的光束法区域网平差软件包,该软件理论严密,具有先进的出差检测算法,可获得高精度平差结果。将两者结合使用,最终可得到空三加密成果。
立体测图使用适普的VirtuozoNT全数字摄影测量系统,采取“所见即所得”方式获取,可直接利用空三加密成果,恢复立体模型,进行全要素采集。
3.5 外业调绘
利用内业采集的线划图套合影像图按一定比例尺打印成纸质图进行外业调绘和补测。作业应严格按照《公路勘测规范》(JTG C10—2007)、《公路勘测细则》(JTG/TC10—2007)相关要求执行,对航测成图进行实地全野外属性调查,并补测室内测图遗漏或不可见的地物,如地下管线和涵洞等。
3.6 项目精度统计
根据设计院施工图阶段道路中线的实测地面高程进行高程精度统计:共抽取1 000个点,将外业实测数据与地形图读取高程数据做比较分析,得出高程中误差为1.53 m,最大误差为4.6 m。其中,小于等于1倍中误差的占75.2%,介于1倍中误差和2倍中误差之间的占20.5%,大于2倍中误差的占4.3%(图4)。因平面精度一般可以达到,因此没有做平面精度检测。通过分析可以看出,在此项目中,高程中误差没有达到精度要求,导致后期公路、桥梁设计仍需依赖大量外业修补与改正,影响了生产效率。

图4 高程误差分布区间
4 结 语
(1)结合工程实例介绍了无人机航测技术在高速公路带状地形图测绘中的应用情况。尽管目前国内无人机技术在测绘行业有了很大推广应用,但大都只是生产制作DOM和DEM,对大比例尺DLG的生产只在一些地势较为平坦的地区做过小面积实验,很少有大范围实际生产应用,特别是在山区等一些地形起伏较大、植被覆盖密集的区域,飞行试验并不多,且精度较平坦地区要低。
(2)无人机航测技术应用于公路地形图的生产存在不确定性,在很多关键技术上有待进一步提高。因此建议在大范围、地形相对复杂的公路带状地形图测绘中,利用无人机航测技术进行地形图生产应尽可能使用传统大飞机,而在大飞机不便或无法完成的情况下由无人机代替。
[1] 魏方震,武少丰,吉世鹏,等.天宝UX5无人机航测系统在公路勘察设计中的应用[J].测绘通报,2005 (3):138-139.
[2] 张惠均.无人机航测带状地形图的试验及分析[J].测绘科学,2013,38(3):100-105.
[3] 崔书珍,周金国.无人机航摄系统在1∶1 000地形图测绘中的应用[J]. 地矿测绘,2014,30(4):29-31.
[4] 王凤国,胡润强.无人机航测技术的应用实践及可行性分析[J].甘肃科技,2014,30(6):34-36.
猜你喜欢
西部交通科技(2021年9期)2021-01-11 12:55:36
当代陕西(2020年23期)2021-01-07 09:24:44
太原科技大学学报(2019年3期)2019-08-05 01:18:18
智能建筑与智慧城市(2018年11期)2018-11-28 09:04:14
中国资源综合利用(2017年2期)2018-01-22 02:45:02
石家庄铁路职业技术学院学报(2017年4期)2017-05-25 13:26:41
中国房地产业(2016年2期)2016-03-01 01:25:35
信息安全研究(2016年10期)2016-02-28 20:18:19
全球定位系统(2015年4期)2015-02-28 12:38:13
电子设计工程(2015年17期)2015-02-27 12:08:03
