
基于电机控制算法的功率分流混合动力汽车引擎优化研究
2018-05-11 00:52邹浙湘黄宝山王倩
电子设计工程 2018年7期
邹浙湘,黄宝山,王倩
(北京理工大学珠海学院,广东珠海519085)
功率分流混合动力汽车(HEV)由内燃机(ICE)和两个电机(MG1和MG2)驱动,其通过功率分流传动器连接。功率分流配置具有机械路径和组合功率分流传动器,以及两个电机的电气路径。在机械路径中,来自ICE的功率被直接传输到车轮。在电气路径中,来自发动机的功率通过MG1(或MG2)转换为电力以驱动MG2(或MG1)或对电池充电[1-4]。这种配置具有诸多优点,如无级变速器(CVT)操作可用于将发动机与道路载荷需求解耦[5-9]。此外,由于其相对较大的电机,可以实现纯电动驱动,并可在车辆运行时启动和停止发动机。这些特征使得车辆的燃料消耗得到降低且排放减少[10-13]。
文中提出了一种功率分流HEV的广义电机控制算法来优化发动机操作。为此,推导出了反映发动机和车辆动力学的功率分流HEV的广义状态方程。提出了两个电机的转矩控制算法,以使用速度-转矩关系和动态运动方程来控制发动机速度。最后进行测试并验证了所提出的控制算法的性能。
1 MG控制算法
功率分流混合动力汽车,如图1所示。

图1 功率分流混合动力汽车
控制目标是控制MG1和MG2的转矩值,使得发动机可以在功率分流HEV的混合动力运行模式下以期望的最佳运行速度运行。为此,控制目标和控制变量确定如下:1)控制目标值:所需发动机转速(ωe_d);2)控制值:MG1和 MG2的转矩值(TMG1和TMG2)。
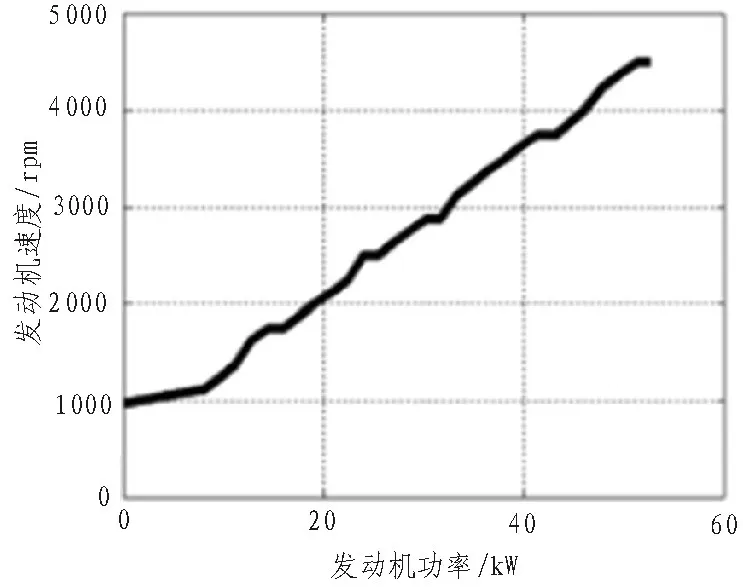
图2 最佳工作线
为获得更好的效率,发动机必须在最佳热效率条件下确定的最佳工作线上操作,参见文献[14]。最佳工作线可通过发动机功率转换成发动机速度曲线,如图2所示。发动机功率Pe由驾驶员的意图确定,可称为油门踏板值。在确定Pe之后,可以从图2确定期望的发动机速度。发动机转矩Te可以如下计算:

功率分流HEV的动态方程可以推导为[15]:

在上述动态方程中,i是从输出至发动机的杆距,a是从输出至MG1的杆距,b是从输出至MG2的杆距,Je是发动机惯性,Te、TMG1和TMG2是输入值,据此可以确定ωe。
对于多输入,如在式(2)中,需要附加的控制器来控制每个输入变量,或者必须使用多反馈来控制变量。在本研究中,Te、TMG1和TMG2被等效的单输入替换,且仅使用一个控制器。因此,式(2)可以表示为

其中Tc是等效输入转矩,是Te、TMG1和TMG2之和。本研究的目标是控制ωe,这可以通过控制Tc以控制发动机速度变化率来实现。为此,反馈控制器设计如下:

其中Kp是比例增益,Ki是积分增益,Kd是微分增益,以及Gfb为反馈控制器。上述控制增益是通过分析调整规则来选择的[16]。
在式(4)中,计算了用于控制发动机速度ωe的控制转矩Tc。Tc由Te、TMG1和TMG2构成。发动机转矩Te可以用式(1)计算,且满足控制转矩Tc的TMG1和TMG2可以表示如下:

在式(5)中存在两个未知参数:TMG1和TMG2,且在计算式(5)之前,其之间的关系必须是已知的。在发动机和电机被同时驱动的HEV模式中,TMG1和TMG2之间的关系由电池功率Pb确定。在加速期间,若油门踏板值(Ap)小于Ap_低,则Pb为0。这意味着车辆仅由发动机驱动,而没有电池电源的帮助。之后,若Ap变得大于Ap_低,则Pb增加以根据驾驶员的加速意图帮助车辆的加速。之后,如果Ap变得大于Ap_高,则Pb被限制为电池的最大功率(Pb_最大)。在制动期间,如果制动踏板值(Bp)小于Bp_高,则与Bp成比例地进行再生制动,且电池充电功率也与之成正比。若Bp变得大于Bp_高,则通过再生制动的充电电力被限制为电池的最大充电电力。在本研究中,提出的确定Pb的方法可根据其他车辆条件(包括电池的充电状态)进行调整。TMG1可以使用如上确定的Pb被表示为TMG2。
图3显示了所提出的总体控制方法图。若给出Pe,则相应地确定Te和ωe_d。所提出的电机控制算法可应用于诸如输入分流、输出分流和使用相同方法的复合分流的功率分流结构。
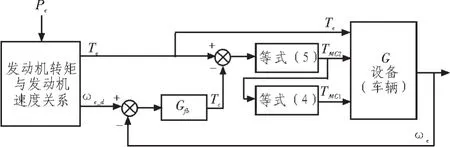
图3 MG1和MG2转矩控制框图
2 控制算法验证
2.1 实验装置
图4显示了双模式功率分流HEV的实验配置。通过减小用于实际车辆的发动机MG1和MG2的容量来设计和制造实验装置,以验证所提出的控制算法的性能。在该实验中,MG3起到发动机的作用,且三相PWM变换器连接逆变器1和逆变器2作为MG1和MG2之间电池的作用。气动离合器和制动器用于离合器、制动系统。施加到气动离合器和制动器的压力由气动比例控制调节器控制。使用飞轮惯性和带式制动器型负载装置。

图4 双模式功率分流HEV的实验配置
2.2 实验结果
图5显示了实验结果,车辆在输入分流模式(a)中从静止状态开始。操作模式在点P(a)处从输入分流模式转换至混合分流模式。在实验中,模式转换点P在输出速度ωout=150 rpm条件下任意选择。操作油门踏板值Ap(b)以确保实际(实验)输出速度跟随期望的输出速度。在区域A中,尽管输出速度(a)降低,但Ap(b)显示正值。这是因为通过带式制动器施加相对大的负载,而在实验中使用小惯性。由于从输出转矩(f)确定Ap以确保输出速度跟随期望速度(a),所以Ap曲线几乎类似输出转矩(f)而不是输出速度(a)。发动机功率(c)是作为期望输出转矩和输出速度(即期望车辆功率)的乘积获得的。电池功率(d)保持接近零。这是因为油门踏板值Ap小于Ap_低(50%)。在本研究中,为了评估电机转矩控制算法的性能,同时最小化电池的影响,将Ap_低设置为50%,以使电池不受干扰。此外,在实验中使用PWM转换器代替实际电池,电池功率被计算为MG1和MG2功率之和。电池功率(d)在模式转换点P处表现出急剧的振荡,因为MG1和MG2的转矩(g)和速度(i)在模式转换点急剧变化。图5(e)是在本实验中,使用的发动机(MG3)的最佳工作线。考虑MG1、MG2和MG3的容量来修改最佳工作线。从最佳工作线,针对给定的期望发动机功率(等式1)确定期望发动机速度(h)和转矩(f)。若给出电池功率、期望的发动机速度和发动机转矩,则可进行MG1和MG2的转矩控制。因此,可以看出,发动机速度恰当地满足期望的发动机速度(h),且发动机在最佳工作线(e)上运行。MG1和 MG2的速度如图5(i)所示。MG1速度由发动机转速和输出速度之间的关系确定,输出速度(a)和发动机速度(h)分别被控制为跟随期望速度。MG2(i)的速度在模式转换点突然改变,因为在输入分流模式中杆距b从混合分流模式中的“负”值变为“零”。另一方面,MG1(i)的速度变化较小,因为杆距a对于两种模式具有相同的值。在模式转换点处的MG1速度的小阶跃变化是由于模式转换期间的转矩变化导致的,这应当从未来工作中的转换质量的角度来控制。在双模式功率分流HEV中,MG1和MG2将发动机功率传送到输出轴。MG2(j)由于电池电力被设定为零(d),所以进行与通过MG1的发电而产生的电力相等的电力驱动。因此,MG1和MG2的功率值在幅度上相似,且具有示出镜像(j)的相反符号(垂直对称性)。如在(c)中所示,由于实验台中的内齿轮和轴承导致的损耗与输入功率相比为更小的输出功率。
可以看出,根据用于双模式功率分流HEV所提出的MG1和MG2转矩控制算法,在最佳工作线附近执行了发动机操作。
3 结束语
文中提出了基于电机控制算法的功率分流混合动力汽车引擎优化算法。并提出了功率分流传动的一般状态方程,且使用动力学方程确定发动机和电机的转矩与速度之间的关系。控制算法被设计为使得其可以控制MG1和MG2的转矩,以使得发动机能够在最佳工作线上操作。为了验证所提出的控制算法的性能,使用两个行星齿轮、离合器和制动器来设计双模式动力分流HEV实验台。使用MG1、MG2、用于模拟发动机的电机和用于模拟电池的PWM转换器进行实验。已证实发动机可在使用本研究中提出的MG1和MG2转矩控制算法的最佳工作线附近运行。

图5 控制算法的实验结果
参考文献:
[1]Gao D,Jin Z,Zhang J,et al.Development and performance analysis of a hybrid fuel cell/battery bus with an axle integrated electric motor drive system[J]. International Journal of Hydrogen Energy,2016,41(2):1161-1169.
[2]Khayyam H,Bab-Hadiashar A.Adaptive intelligent energy management system of plug-in hybrid electric vehicle[J].Energy,2014,69(5):319-335.
[3]Zhang S,Xiong R.Adaptive energy management of a plug-in hybrid electric vehicle based on driving pattern recognition and dynamic programming[J].Applied Energy,2015,155(5):68-78.
[4]CH Lin.Dynamic control of V-belt continuously variable transmission-driven electric scooter using hybrid modified recurrent legendre neural network control system[J].Nonlinear Dynamics,2015,79(2):787-808.
[5] TakahashiS,EguchiT,UtagawaT,etal.Continuously variable transmission and a hydraulic control method thereof[J].Geochemical Journal,2016(12):81-88.
[6]Belter J T,Dollar A M.A passively adaptive rotaryto-linear continuously variable transmission[J].IEEE Transactions on Robotics,2014,30(5):1148-1160.
[7]Liu Y,Ho S L,Fu W N.Novel electrical continuously variable transmission system and its numerical model[J].IEEE Transactions on Magnetics,2014,50(2):757-760.
[8]Aoyama T,Takahara H,Kuwabara S,et al.Developmentofnew generation continuously variable transmission[J].Pediatrics,2014,53(5):726-36.
[9]CH Lin.Application of V-belt continuously variable transmission system using hybrid recurrent laguerre orthogonal polynomials NN control system and modified particle swarm optimization[J].Vaccine,2015,10(5):479-485.
[10]Han J,Park Y,Kum D.Optimal adaptation of equivalent factor of equivalent consumption minimization strategy for fuel cell hybrid electric vehicles under active state inequality constraints[J].Journal of Power Sources,2014,267(4):491-502.
[11]Martel F,Kelouwani S,DubéY,et al.Optimal economy-based battery degradation management dynamics for fuel-cell plug-in hybrid electric vehicles[J].Journal of Power Sources,2015,274(274):367-381.
[12]Chen Z,Xia B,You C,et al.A novel energy management method for series plug-in hybrid electric vehicles[J].Applied Energy,2015,145(7):172-179.
[13]Holmén B A,Sentoff K M.Hybrid-Electric passenger car carbon dioxide and fuel consumption benefits based on real- world driving[J].Environmental Science&Technology,2015,49(16):10199-10208.
[14]Muta K,Yamazaki M,Tokieda J.Development of new-generation hybrid system THS II-Drastic improvement of power performance and fuel economy[J].Sae Transactions,2004,23(8):697-710.
[15]Conlon B.Comparative analysis of single and combined hybrid electrically variable transmission operating modes[J].Sae Transactions,2005(1):1162-1178.
[16]Skogestad S.Probably the best simple PID tuning rules in the world[C]//Reno,NV,USA:AIChE Annual Meeting,2001.
猜你喜欢
预防青少年犯罪研究(2022年1期)2022-08-15
电子技术与软件工程(2019年21期)2020-01-16
四川冶金(2018年1期)2018-09-25
制造技术与机床(2017年6期)2018-01-19
电信科学(2017年6期)2017-07-01
通信电源技术(2016年1期)2016-04-16
电源技术(2015年9期)2015-06-05
电机与控制应用(2015年3期)2015-03-01
肝胆胰外科杂志(2015年1期)2015-02-27
组合机床与自动化加工技术(2014年12期)2014-03-01
