一种新的自适应惯性权重混沌PSO算法
2018-05-08 07:51李龙澍张效见
计算机工程与应用 2018年9期
李龙澍,张效见
LI Longshu1,2,ZHANG Xiaojian2
1.安徽大学 计算智能与信号处理教育部重点实验室,合肥 230039
2.安徽大学 计算机科学与技术学院,合肥 230601
1.Key Laboratory of Intelligent Computing and Signal Processing,Anhui University,Hefei 230039,China
2.School of Computer Science and Technology,Anhui University,Hefei 230601,China
1 引言
PSO算法是一种寻优算法,于1995年由Eberhart和Kennedy首次提出[1-2]。它源于模拟鱼类和鸟类的寻食行为[3]。PSO算法具有操作简单、鲁棒性强和易于实现等优点,优化性能较好,常用于解决多峰值、不可微和非线性等问题,并在工程和科学领域得到广泛应用,如函数优化[4]、排列[5]和神经网络[6]等。
虽然PSO算法优化性能较好,但是在寻优求解进程中,不能很好地平衡粒子的搜索行为,存在易陷入局部极值的缺陷。对此,研究人员提出了诸多改进方法,主要分为以下两类:第一类是在PSO算法速度迭代公式中增加惯性权重ω,以更好地平衡粒子的搜索行为。近年来,研究人员对惯性权重进行了广泛研究[7-10]。例如,文献[7-8]提出惯性权重线性减少方法,以提高寻优性能,并被广泛应用,称之为标准PSO算法。但在该算法中,如果粒子在寻优初期搜索到的位置不够好,易陷入局部极值。文献[9-10]对惯性权重采用指数减少方法,减少了算法陷入局部极值的概率。另一类是引入其他优化方法,文献[11]在PSO算法中引入两种混沌优化策略,提高了收敛精度。文献[12]在PSO算法中引入GA算法的变异和交叉操作,提高了收敛性。基于以上研究,本文针对PSO算法易陷入局部极值的缺陷,提出了一种新的自适应惯性权重混沌PSO算法(a New Chaos Particle Swarm Optimization based on Adaptive Inertia Weight,CPSO-NAIW)。实验结果表明,CPSO-NAIW算法能有效避免陷入局部极值,提高算法性能。
2 PSO算法
PSO算法可具体表述如下:首先初始化种群粒子,然后每一个粒子通过追逐个体和群体极值位置,即粒子本身和整个粒子种群当前找到最优解的位置,来更新粒子的位置和速度,最后不断迭代直到找到在指定阈值的最优位置。在种群规模为M,解空间为D维的PSO算法中,设第i粒子个体和群体极值位置分别为Pi和G,在d维的位置和速度分别为xid和vid,xid和vid的更新公式如下:

3 CPSO-NAIW算法
介绍了惯性权重线性减少方法的缺点,然后提出了一种根据粒子与群体极值位置距离进行权重调整的方法,该方法更好地平衡了粒子的搜索行为,减少了算法陷入局部极值的概率,最后针对算法如何摆脱局部极值的问题,提出了一种基于混沌优化摆脱局部极值的方法,该方法通过引入混沌优化策略,在算法陷入局部极值时,对群体极值位置进行调整,以使粒子经历新的搜索邻域和路径,增加算法摆脱局部极值的可能。
3.1 自适应惯性权重
在PSO算法寻优迭代中,应用较多的是惯性权重线性减少方法,然而,PSO算法的寻优进程是非线性且十分复杂的,线性减少的方法变化过于单一,造成其对非线性、复杂寻优进程的调节和适应能力有限,易陷入局部极值。因此,本文提出了一种新的惯性权重自适应方法(New Adaptive Inertia Weight,NAIW),NAIW计算方法如式(3)所示。
其中,ωmax和ωmin分别为惯性权重的最大和最小值,ωmax=0.9,ωmin=0.4[16];Δxi为第 i个粒子与群体极值位置的距离,利用式(4)计算得到;为Δxi在t代中的值;iterNum为最大迭代次数;k为迭代系数,利用式(5)计算得到。NAIW方法通过粒子相对于群体极值位置的距离对权重进行动态调整,把权重的变化与粒子的位置状态信息关联起来,以更加精确地调整惯性权重。当较大时,即粒子距当前最优解位置的距离较远,则利用式(3)会赋予速度更新式(1)中较大的值,以使粒子获得较大飞行速度,进而可以使其更快速地向当前最优解位置靠近并保证了种群全局“探索”能力,当较小时,即粒子距当前最优解位置的距离较近,则利用式(3)会赋予速度更新式(1)中较小的值,以使粒子获得较小飞行速度,进而可以使其更加精细地搜索最优解位置邻域,保证了种群局部“开发”能力。同时,式(3)中的k值随迭代次数的增加而减少,以保证算法在迭代初期和后期分别对较大和较小的需要[7-8]。通过以上调整权重的方法,增强了权重的自适应性,更好地平衡了粒子的搜索行为,减少了算法陷入局部极值的概率,提高了PSO算法的收敛性。
3.2 基于混沌优化摆脱局部极值的方法
混沌是一种非线性的自然现象,具有随机性、遍历性等特点,可进行寻优搜索[17-19]。
一个常用的混沌模型Logistic方程如下:

其中,μ为控制参量,当 0≤z0≤1,μ=4时,Logistic处于完全混沌状态。式(7)为Logistic方程的一种演化形式[20]。

本文借鉴混沌现象随机性和遍历性的特点,提出了基于混沌优化摆脱局部极值的方法。该方法通过群体极值位置连续未更新的代数SG与局部极值判定阈值SGmax进行比较来判定算法是否陷入局部极值[14]。若SG≥SGmax,则认为算法已经或即将陷入局部极值;反之,则认为算法没有陷入局部极值。当算法被判定为陷入局部极值时,首先利用式(8)把群体极值位置G映射到混沌变量定义域[0,1]内,然后利用式(7)进行迭代运算,得到 M 个混沌位置(CG1,CG2,CG3,…,CGm),最后利用式(9)进行逆映射,获得 M 个新群体极值位置(G1',G2',G3',…,Gm')。由于粒子通过追逐个体和群体极值位置来完成自我更新,当算法陷入局部极值时,群体极值位置一定在局部极值位置上,此时,采用混沌映射得到具有较强随机性和遍历性的新群体极值位置,并结合式(1)就可以改变粒子的寻优轨迹,使得粒子i通过追逐新群体极值位置Gi'进行自我更新时,可在局部极值位置邻域外的其他区域进行寻优搜索,搜索新的邻域和路径。因此可以较大概率地发现更优解,进而增加了算法摆脱局部极值的可能。
3.3 CPSO-NAIW算法执行流程
本文从惯性权重的调整和如何摆脱局部极值两个方面对PSO算法进行改进,提出了CPSO-NAIW算法,该算法的具体执行流程如下。
输入:算法迭代次数T、种群规模M。
输出:最优位置G。
(1)随机初始化种群中粒子的速度和位置,初始化迭代次数、计数器和局部极值判定阈值为t=0、SG=0和SGmax=10[14]。
(2)初始化P为粒子当前位置,G为初始群体最优粒子位置。
(3)对种群中所有粒子执行以下操作:
②根据式(1)和式(2)更新粒子速度和位置。
③计算粒子适应度值 f,并更新粒子的P和G,如果G未更新,SG=SG+1,否则SG=0。
(4)如果 SG≥SGmax,利用式(7)~(9)对 G 进行混沌优化生成G1',G2',Gi',…,Gm',SG=0。
(5)t=t+1,如果 t<T ,转(3),否则,执行(6)。
(6)输出G,算法结束。
在CPSO-NAIW算法中,第(1)、(2)步对算法各个参数进行初始化,第(3)~(6)步对求解问题进行寻优搜索。其中,第(3)步利用本文提出的新惯性权重自适应方法(NAIW)对粒子进行更新,第(4)步判断算法是否陷入局部极值,若SG≥SGmax,则认为算法已经或即将陷入局部极值,并利用本文提出的基于混沌优化摆脱局部极值的方法来进行摆脱。
4 实验结果与分析
首先介绍了实验环境和算法参数设置,然后为了验证本文提出的改进方法的有效性,采用6个经典基准函数对算法性能进行测试。基准函数信息见表1。并设计如下方案进行对比。方案1:对两种改进方法分开进行测试,首先在标准PSO算法[7](Standard Particle Swarm Optimization,SPSO)即线性减少惯性权重PSO算法的基础上,对权重的调整采用本文提出的新自适应惯性权重方法,形成PSO-NAIW算法,然后在SPSO算法基础上,加入本文提出的基于混沌摆脱局部极值方法,形成CPSO算法,最后把本文提出的两种改进方法综合起来,形成CPSO-NAIW算法并把它们与SPSO算法进行对比测试。方案2:为展示本文CPSO-NAIW算法的先进性,将CPSO-NAIW算法与一些具有代表性的新近改进PSO算法,即IAW-PSO[21]、高速收敛PSO算法(表示为FPSO)[14]、PDNPO-PSO算法[22]和SPSO算法进行对比测试。

表1 基准函数
4.1 实验环境与参数设置
实验采用C#编写,实验环境为(M490)CPU 3.20 GHz Inter core i5和4 GB RAM。PSO-NAIW、CPSO、CPSONAIW以及SPSO算法参数设置如下:惯性权重最大和最小值分别为ωmax=0.9和ωmin=0.4;IAW-PSO算法参数设置如下[21]:惯性权重最大和最小值分别为ωmax=0.9和ωmin=0.2;迭代步数K1=60,K2=10;最大初始化次数kmax=200;FPSO算法参数设置如下[14]:惯性权重最大和最小值分别为ωmax=0.9和ωmin=0.4;停滞上限MAX=10;PDNPO-PSO算法参数设置如下[22]:惯性权重最大和最小值分别为ωmax=0.9和ωmin=0.4;惯性权重取值范围中间值ωs=0.65;上限控制参数k1=2;调节能力控制参数k2=1;个体学习因子的最大和最小值分别为c1max=2和c1min=0;群体学习因子的最大和最小值分别为c2max=2和c2min=0;振荡周期L=300。所有算法的种群规模M为30;学习因子c1=c2=2。
4.2 PSO-NAIW、CPSO、CPSO-NAIW和SPSO算法对比测试
为了测试PSO-NAIW、CPSO和CPSO-NAIW算法性能,本文设置以下实验进行对比分析。
实验1 PSO-NAIW、CPSO、CPSO-NAIW和SPSO算法在迭代1 000次的情况下,对6个基准函数进行寻优搜索,每个算法进行20次独立实验,取各个函数最终结果的平均(Mean)和最优(Opt)值进行比较。实验结果如表2所示。
实验2 PSO-NAIW、CPSO、CPSO-NAIW和SPSO算法在固定目标精度下(各个函数目标精度如表1),对6个基准函数进行寻优搜索,每个算法进行20次独立实验,取各个算法达到目标精度时的平均迭代次数(Itr)、平均运行时间(t)及收敛率(CR)。其中,收敛率=达到目标精度次数/总实验次数。算法2 000次迭代内不收敛即视为当次实验失败,实验结果如表3所示。
从表2中看出,虽然PSO-NAIW、CPSO和CPSONAIW算法在对函数 f4和 f5测试时,与SPSO算法实验结果相同,但是在其他4个函数上无论是最优还是平均函数值都明显优于SPSO算法,并且CPSO-AIW算法实验结果最优。从表3中看出,虽然PSO-NAIW、CPSO和CPSO-NAIW算法在对函数 f1~f5测试时,与SPSO算法的收敛率相同,但是PSO-NAIW和CPSO算法对于除函数 f4外的其他4个函数,收敛速度更快、用时较少,并且,CPSO-NAIW算法对函数 f1~f5的收敛速度最快、用时最少。同时在表3中还可以看出,PSO-NAIW、CPSO和CPSO-NAIW算法在对函数 f6进行测试时,这三种算法相对于SPSO算法的收敛率更高、收敛速度更快、运行时间更短,并且CPSO-NAIW算法的收敛率最高、收敛速度最快、运行时间最短。综上,可以得出,PSO-NAIW、CPSO和CPSO-NAIW算法在整体性能上优于SPSO算法。这是因为PSO-NAIW算法根据粒子与群体极值位置距离来调整惯性权重,改善了权重的自适应性,更好地平衡种群的局部“开发”和全局“探索”能力,降低了算法陷入局部极值的可能。所以,算法用时较少、收敛精度和速度明显提高。CPSO算法利用混沌现象随机性及遍历性的特点,在算法陷入局部极值时,对群体极值位置进行混沌优化,以使粒子搜索局部极值外的新邻域和新路径,增强了算法跳出局部极值的可能。所以,算法运行时间短、收敛精度高且速度快。而CPSO-NAIW算法综合了PSO-NAIW和CPSO算法的改进方法,所以具有最优的收敛性能。

表2 实验1结果

表3 实验2结果
4.3 CPSO-NAIW、IAW-PSO、FPSO、PDNPOPSO和SPSO算法对比测试
为了验证本文CPSO-NAIW算法性能,在6个基准函数上对本文CPSO-NAIW与IAW-PSO、PDNPO-PSO、FPSO和SPSO算法进行20次独立实验,每次实验迭代1 000次。实验结果如图1~6所示。由图1~3可知,对于函数 f1~f3,本文CPSO-NAIW算法不仅求解精度高且收敛速度快。由图4和图5可知,本文CPSO-NAIW算法对函数 f4和 f5的求解都达到了相应理论极值,并且对于函数 f5,本文CPSO-NAIW算法收敛速度更快。由图6可知,虽然5种算法对于函数 f6求解效果都不理想,但是本文CPSO-NAIW算法的求解精度和收敛速度明显优于其他4种算法。因此本文提出的CPSO-NAIW算法具有很好的收敛性能。

图1 f1函数
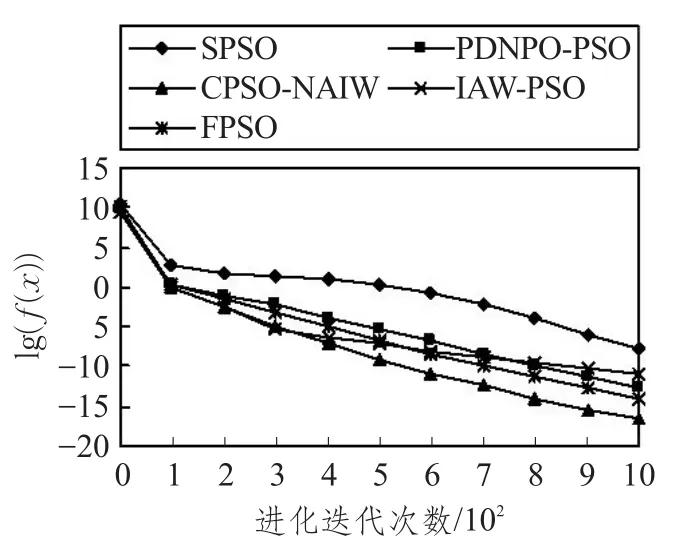
图2 f2函数

图3 f3函数

图4 f4函数
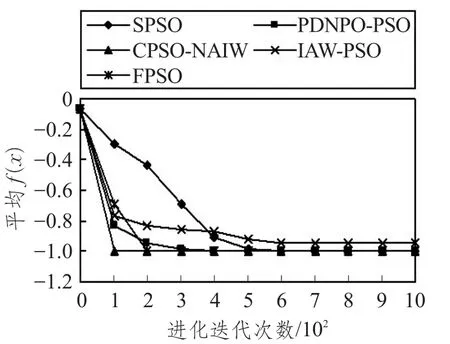
图5 f5函数

图6 f6函数
5 结论
本文针对PSO算法易陷入局部极值的缺陷,提出了一种新的自适应惯性权重混沌PSO算法(CPSO-NAIW)。该算法首先采用新的权重自适应方法(NAIW),通过粒子与群体极值位置距离对权重进行调整,使权重的调整与粒子的状态位置状态信息相结合,更好地平衡粒子的全局和局部搜索行为,在提高算法自适应性的同时减少了其陷入局部极值的概率,然后采用基于混沌优化摆脱局部极值的方法,该方法在算法陷入局部极值时,对群体极值进行混沌调整,以使各个粒子在追逐不同群体极值位置进行更新时,可以改变寻优轨迹,提高了算法摆脱局部极值的能力。实验结果表明,本文CPSO-NAIW算法,克服局部极值的能力更强,在收敛性能上更优。然而,本文CPSO-NAIW算法存在着稳定性不足问题,后续工作会针对该问题进行相关研究。
参考文献:
[1]Zhang Y,Gong D W,Ding Z.A bare-bones multi-objective particle swarm optimization algorithm for environmental/economic dispatch[J].Information Sciences,2012,192(6):213-227.
[2]汤可宗,柳炳祥,杨静宇,等.双中心粒子群优化算法[J].计算机研究与发展,2012,49(5):1086-1094.
[3]Nickabadi A,Ebadzadeh M M,Safabakhsh R.A novel particle swarm optimization algorithm with adaptive inertia weight[J].Applied Soft Computing,2011,11(4):3658-3670.
[4]陈得宝,赵春霞.阶梯型粒子群算法及在函数优化中的应用[J].系统仿真学报,2007,19(24):5659-5662.
[5]Goudos S K,Rekanos I T,Sahalos J N.EMI reduction and ICs optimal arrangement inside high-speed networking equipment using particle swarm optimization[J].IEEE Transactions on Electromagnetic Compatibility,2008,50(3):586-596.
[6]Bashir Z A,El-Hawary M E.Applying wavelets to shortterm load forecasting using PSO-based neural networks[J].IEEE Transactions on Power Systems,2009,24(1):20-27.
[7]Shi Y,Eberhart R C.Empirical study of particle swarm optimization[C]//Proceedings of the Congress on Evolutionary Computation,1999:32-49.
[8]Eberhart R C,Shi Y.Comparing inertia weights and constriction factors in particle swarm optimization[C]//Proceedings of the Congress on Evolutionary Computation,2000:84-88.
[9]Pediwal J,Mahor A,Khatri N.Exponential decreasing inertia weight particle swarm optimization in economic load dispatch[J].International Journal of Engineering Innovations&Research,2012,1(5):380-384.
[10]Ting T O,Shi Y,Cheng S,et al.Exponential inertia weight for particle swarm optimization[C]//International Conference in Swarm Intelligence,2012:83-90.
[11]刘道华,原思聪,兰洋,等.混沌映射的粒子群优化方法[J].西安电子科技大学学报:自然科学版,2010,37(4):764-769.
[12]雷秀娟,付阿利,孙晶晶,等.改进PSO算法的性能分析与研究[J].计算机应用研究,2010,27(2):453-458.
[13]丁旭,吴晓蓓,黄成.基于改进粒子群算法和特征点集的无线传感器网络覆盖问题研究[J].电子学报,2016,44(4):967-973.
[14]朱海梅,吴永萍.一种高速收敛粒子群优化算法[J].控制与决策,2010,25(1):20-24.
[15]吕振肃,侯志荣.自适应变异的粒子群优化算法[J].电子学报,2004,32(3):416-420.
[16]敖永才,师奕兵,张伟,等.自适应惯性权重的改进粒子群算法[J].电子科技大学学报,2014,43(6):874-880.
[17]Ying Song,Chen Zengqiang,Yuan Zhuzhi.New chaotic PSO-based neural network predictive control for nonlinear process[J].IEEE Transactions on Neural Networks,2007,18(2):595-601.
[18]Zhou Keliang,Qin Jieqiong.PID controller parameters tuning of main steam temperature based on chaotic particle swarm optimization[C]//IEEE International Conference on Computer Science and Automation Engineering(CSAE),2011:647-650.
[19]唐贤伦,周维,张衡,等.一种基于多目标混沌PSO的机器人足球防守策略[J].系统仿真学报,2014,26(1):51-55.
[20]莫愿斌,陈德钊,胡上序,等.混沌粒子群算法及其在生化过程动态优化中的应用[J].化工学报,2006,57(9):2123-2127.
[21]杜继永,张凤鸣,李建文,等.一种具有初始化功能的自适应惯性权重粒子群算法[J].信息与控制,2012,41(2):165-169.
[22]朱喜华,李颖晖,李宁,等.基于群体早熟程度和非线性周期振荡策略的改进粒子群算法[J].通信学报,2014,35(2):182-189.
猜你喜欢
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
新世纪智能(数学备考)(2021年10期)2021-12-21
河北理科教学研究(2020年3期)2021-01-04
当代陕西(2020年17期)2020-10-28
语数外学习·高中版中旬(2020年10期)2020-09-10
中学数学杂志(2019年1期)2019-04-03
人大建设(2018年5期)2018-08-16
中学生数理化·八年级物理人教版(2017年3期)2017-11-09
应用科技(2015年5期)2015-12-09
中学生数理化·八年级物理人教版(2014年1期)2015-01-09