
基于STM32的低功耗自动静脉穿刺系统研究
2018-05-08 12:45霍亮生赵雄王燕青王鑫阮晨诗函
中国医疗设备 2018年4期
霍亮生,赵雄,王燕青,王鑫,阮晨诗函
1.北京工商大学 材料与机械工程学院,北京 100048;2.中国人民解放军第三〇七医院 肿瘤科,北京 100071
引言
静脉穿刺是医护人员在对患者进行疾病诊疗时的一种常见的临床治疗方法,据统计,美国每年进行静脉穿刺多达14亿次[1-2]。能够有效地帮助患者免于反复承受穿刺的痛苦,还可以用于抽取血液样本。CT和B超等图像可视化技术的发展,使得静脉穿刺置管技术有了进一步的改良。超声引导下应用塞丁格技术进行穿刺是目前国际上广泛应用的PICC穿刺术[3],通过超声图像进行可视化引导定位,提高了PICC置管的成功率,降低了静脉炎的发生,减轻穿刺点增生,减少了组织损伤与并发症[4]。
目前,B超引导下的静脉穿刺置管技术在临床上有较大的优越性,但是这种方法要求医护人员掌握熟练的穿刺置管技术,国内这方便医护人员紧缺,穿刺人才培养成本较高。针对以上问题,本文设计了一种低功耗的便携式静脉穿刺装置,该装置采用B超引导,通过B超图像反馈及STM32嵌入式系统控制,实现了自动穿刺过程,大大提高了穿刺过程中的自动化程度,也降低了对于穿刺医护人员的经验、技术要求。
本文所述自动静脉穿刺装置具有以下特点:① 穿刺装置的结构采用聚酰胺树脂材料,强度高,质量轻,抗菌效果较好;② 体积小,可实现与掌上B超的快速安装拆卸,可适用于地震、野外急救等多种急救场合;③ 在B超扫描定位阶段可实现待机、停机,穿刺时快速唤醒,控制系统耗能低,响应快;④ 通过可视化技术定位,系统精度高;⑤ 成本低。
1 系统总体方案
1.1 系统总体方案设计
自动静脉穿刺系统的总体方案设计,见图1,主要由穿刺模块和显示处理模块两大部分组成,穿刺模块主要包括便携式B超、控制器、驱动电机和引导穿刺结构,显示处理模块主要包括图像显示器和图像处理器两部分。
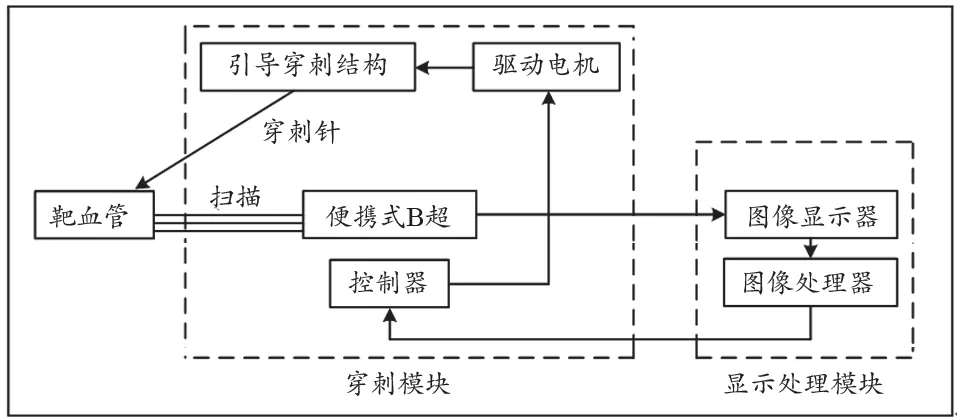
图1 总体方案设计图
1.2 系统工作原理
医护人员手持B超扫描患者穿刺部位,确定穿刺靶血管,固定穿刺部位并确定穿刺位置,穿刺开始后先由显示处理模块根据B超所扫描的血管图像进行智能分析,识别血管的皮下位置及血管内径等参数,嵌入式控制器根据血管参数自动计算进针距离,通过驱动器控制电机驱动穿刺针进行穿刺,由医护人员将穿刺软管推入靶血管一段距离,穿刺针退回到初始位置,完成穿刺。
2 穿刺装置设计
2.1 B超选择
本设计中便携式B超采用朗昇科技有限公司的mSonics MU1智能掌上超声,该设备便携易用,超声成像效果较好,满足使用要求。
2.2 图像处理器
图像处理器能够通过对B超所扫描到的血管图像进行分析,自动识别图像中靶血管,并测量出血管内径与血管深度[5],将数据返回到控制系统。图像处理器所处理过的血管B超图像,见图2。
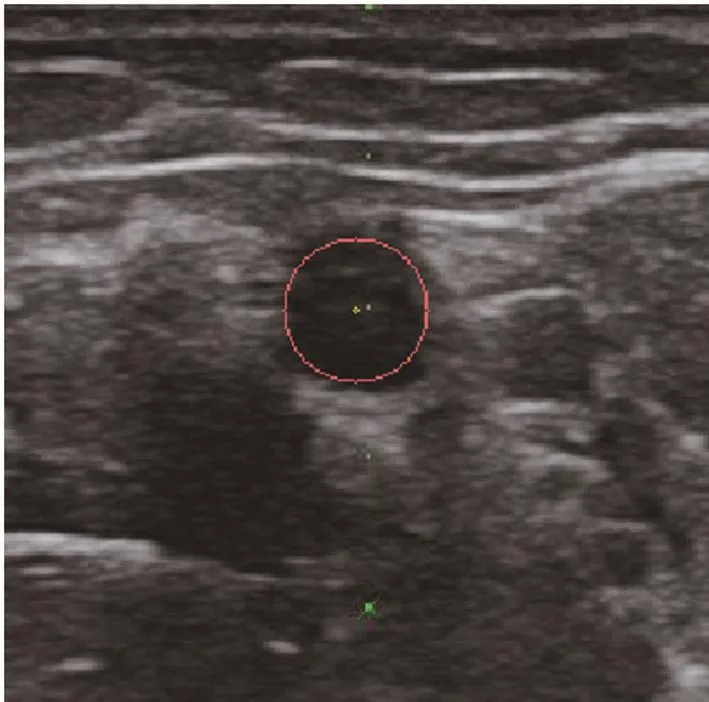
图2 图像识别器处理过后的血管B超图像
2.3 电机选型
为保证穿刺传动稳定性,采用直线驱动方式,并选用微型滑台步进电机作为穿刺驱动电机。穿刺过程中负载来源分为:穿刺皮肤组织的阻力、丝杠与滑块的传动阻力。根据穿刺力实验的研究数据表明,手动穿刺速度一般都低于5 mm/s,穿刺时穿刺力都小于4 N[6]。选用2相4线制微型步进电机,驱动电压为(4~9)V/(100~500)mA,丝杆长度为80 mm,滑块行程为70 mm,电机直径15 mm,丝杠直径3 mm,丝杠螺距0.5 mm,步距角18°[7]。
2.4 机械结构
根据B超探头模型与选定的电机尺寸,设计穿刺装置示意图,见图3。
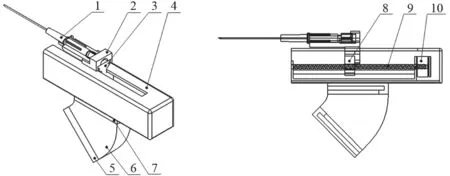
图3 穿刺装置机械结构示意图
3 自动静脉穿刺系统控制器软硬件设计
3.1 控制器硬件设计
根据所需功能与控制要求,控制器的硬件设计,见图4。并对各组成部分进行介绍。
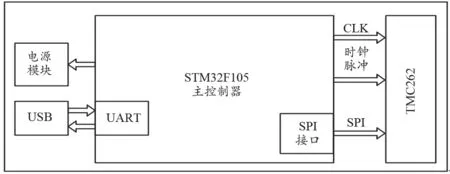
图4 控制器硬件设计
(1)MCU模块选用的是STM32F105芯片,采用LQFP32封装,它是一款基于ARM Cortex-M3内核的32位微处理器[8-9],其内核是专门设计于满足高性能、低功耗、实时应用的嵌入式领域的要求,工作频率为72 MHz,内置高速存储器(高达256 K字节的闪存和64 K字节的SRAM),片内集成有12位的A/D等。STM32F105芯片在低功耗方面表现的比较出色,有Sleep、Stop、Standby三种模式,可以满足系统低功耗的要求,最低电流消耗可以降到2 mA,并且从低功耗模式下也可以快速唤醒,在Stop模式时唤醒微控制器只需要6 μs[10]。
(2)图像处理系统与驱动控制器之间的通信采用CP2102芯片,这是一款可以应用于USB接口转UART通信的芯片,它与3 V或5 V供电的单片机连接不需要进行电平转换。该芯片具有高集成度的特点,内置USB 2.0标准的全速功能控制器、USB收发器、内部时钟、缓冲器、EEPROM和带有调制解调器接口信号的异步串行数据总线(UART),无需外部USB器件[11]。USB功能控制器用来管理USB和UART间所有的数据传输、USB主控制器发出的命令请求以及UART功能控制命令[12]。CP2102的UART接口包括TX端(数据发送)、RX端(数据接收)以及RTS、CTS、DSR、DTR、DCD和RI控制信号,UART支持RTS/CTS、DSR/DTR和X-On/X-Off握手,还可以通过编程使UART支持各种数据格式和波特率[13]。CP2102串行总线的数据格式和波特率,见表1。
本文实现USB与RS232接口电路设计。转换电路原理图,见图5。该电路以CP2102为核心器件,将USB信号转为串口信号,D+、D-为数字I/O口,RXD/TXD进行UART数据接收发送,选择MAX3223芯片作为RS-232的接口芯片,完成RS-232电平到TTL电平的转换,该芯片工作电压为3~5.5 V,静态电流低于1 μA,负载电流低于2 mA,数据传输率为120 Kbps,外围元件少,体积小。
(3)系统供电电压DC 5 V,要实现对电机的驱动,需进行升压处理,使的驱动器输出电压为+12 V。本文采用LM2587芯片来设计升压电路。LM2587是一款反馈电源开关芯片,电源开关是一个可以承受65 V电压的5.0 A NPN器件,该芯片具有非常好的线性和负载调节特性,只需要很少的外围器件就可以构成高效的稳压电路[14]。输入电压范围为4~40 V,输出电压范围为1.23~57 V,调节范围较宽,并且还具有热关闭和限流保护功能。基于LM2587的+5~+12 V升压电路,见图6。
(4)步进电机驱动器选择的是TRINAMIC公司的TMC262驱动芯片,该芯片采用QFN32封装,体积较小,是一款高精度的两相步进电机驱动芯片,驱动电压可达60 V,电流可达8 A[15]。该芯片集成了coolStepTM和stallGuard2TM等多项专利技术[16],stallGuard功能可以使芯片在没有传感器的情况下对失速进行自主探测,coolStep功能可以使芯片根据电机负载的大小调节输出电流的大小,既减少了步进电机失步和丢步现象的发生,又降低了发热,减少了功耗。TMC262芯片自身有着256细分,并且它的微分校验功能使得每个微分有了精度保证。该芯片可以通过SPI和S/D模式进行电机控制,自身带有过流、短路、过温保护电路,低功耗高效率,目前在生物仪器和医疗设备中应用非常广泛。

表1 CP2102串行总线的数据格式和波特率
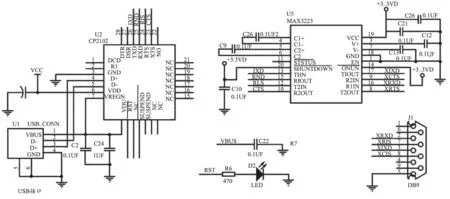
图5 USB转串口-CP2102电路原理图
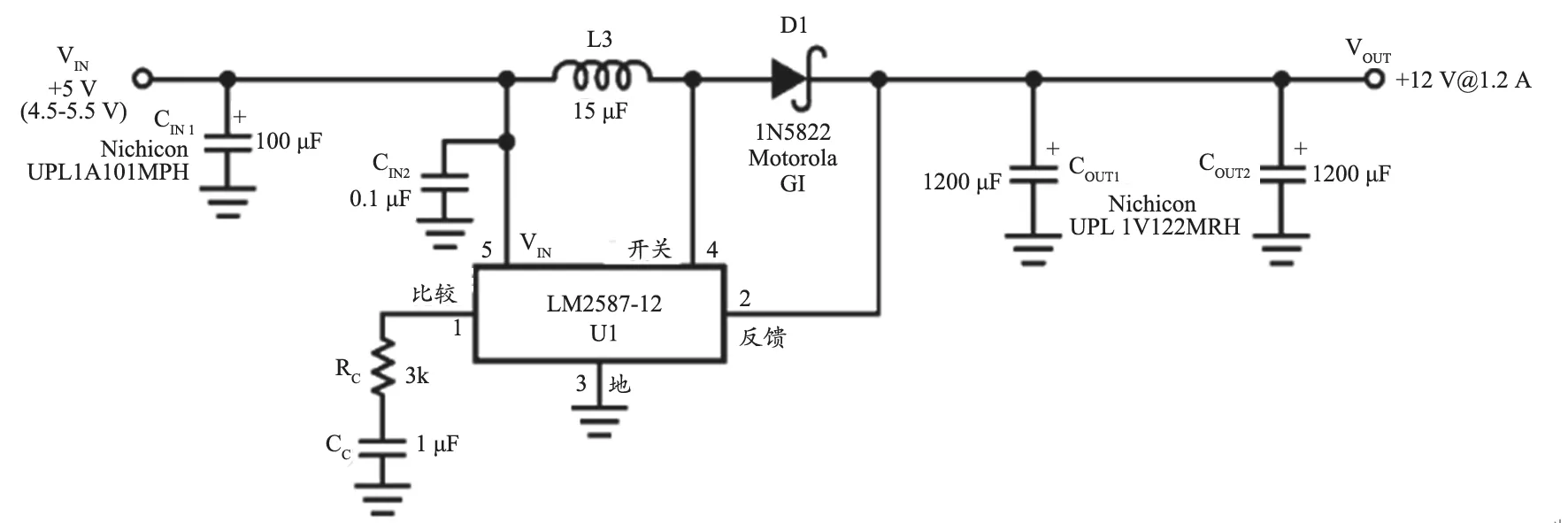
图6 LM2587芯片升压(+5~+12 V)电路
3.2 控制器软件设计
控制器的软件开发采C语言的Keil MDK集成开发环境,Keil MDK有丰富的STM32固件库,提高了软件开发效率[17]。穿刺控制程序流程,见图7。首先对系统进行初始化,包括对SPI的初始化、运动控制命令定义、通信功能的初始化等,完成初始化操作之后判断穿刺针是否在初始位置,确认穿刺针的初始位置之后开始进行穿刺,当驱动系统驱动穿刺针到达靶血管目标位置后,由医护人员手动将软管推入血管内,软管进入血管之后医护人员触动穿刺结束的按钮,驱动系统收到穿刺结束指令,开始退针,退针完毕穿刺结束。
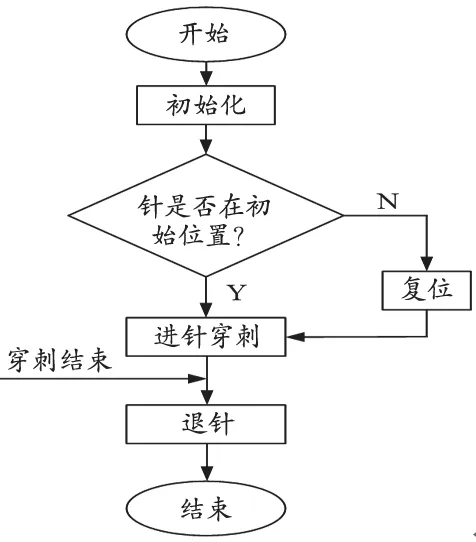
图7 穿刺控制程序流程图
4 进针控制
本文通过随机采集解放军第三〇七医院肿瘤科100例穿刺患者的静脉超声图像数据,分析其穿刺静脉血管的半径r及血管中心距离皮肤表层的距离h的分布范围,得到以下数据:静脉血管半径最小为1.22 mm,最大为3.25 mm,平均半径为2.05 mm;血管中心距离皮肤表层的距离h最小值为3.06 mm,最大值为14.22 mm,平均高度为8.60 mm。本文将安全穿刺范围缩小为:血管半径允许范围(1.50~2.60)mm,血管中心距离皮肤表层的距离h允许范围(5.60~11.00)mm。
穿刺时血管示意图,见图8。血管半径为r,血管中心距离皮肤表层的距离为h,穿刺针初始位置距离皮肤高度为d,安装好穿刺装置之后,d的值是确定的,穿刺角度α为45°,针穿破血管时位置为C,到达D点时进针结束,CD长度为血管直径的三分之二。
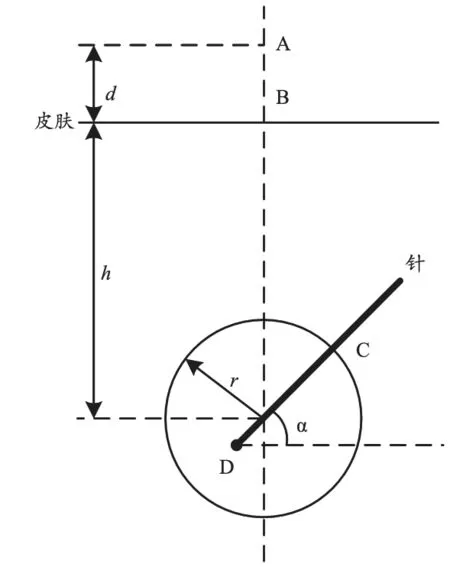
图8 穿刺血管示意图
进针距离计算公式:
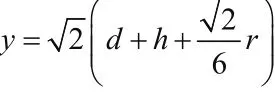
根据步进电机脉冲当量即可计算得出脉冲数。穿刺针以较快速度穿破皮肤之后速度变慢,之后在皮下组织中穿行,刺破血管达到指定位置停止。采用PWM调频调宽法来控制步进电机的转速。
5 实验验证
5.1 控制精度验证
通过对体模进行B超扫描采样,分析得出100组血管参数样本,之后在上位机调试平台根据每组血管的数据进行进针控制测试,验证进针控制精度是否达到要求。体模实物,见图9,体模长18 cm,宽11.5 cm,上表面为圆弧形,圆弧最高点距体模底部高度为4.5 cm,两端距离体模底部距离为2 cm。体模中有五条模拟血管,血管的离皮高度分布在3.0~13.0 mm,血管半径分布在1.3~3.0 mm,是一个较好的实验平台。为穿刺安全及准确性考虑,穿刺针实际穿刺距离可允许的误差范围为:理论穿刺距离。在进行了100组进针控制测试的基础上对每组测试结果进行数据分析,误差最大值为,误差最小值为-,在允许误差范围内,测试结果满足要求。
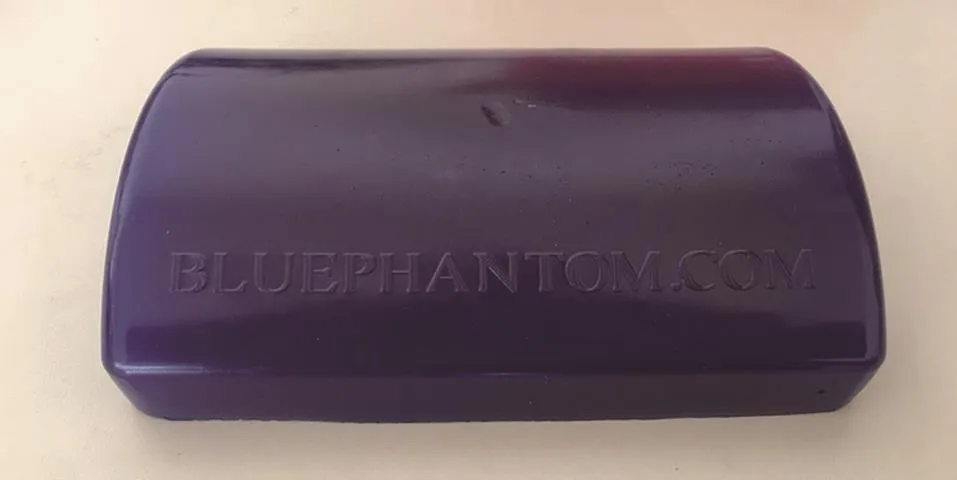
图9 体模实物图
5.2 穿刺置管验证
本文通过对体模中的血管进行穿刺置管实验要验证自动静脉穿刺设备的功能性。在图9所示的体模中的每条血管上分别选择9处不同位置的模拟血管,深度内径等交叉分布,由专业医护人员操作进行穿刺置管实验,共进行45例。实验情况统计,见表2。
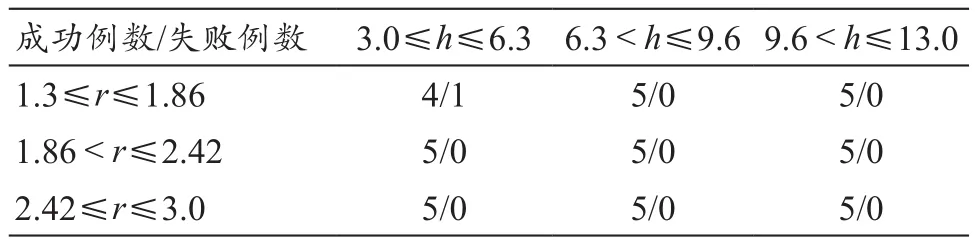
表2 穿刺置管情况统计(例)
置管实验中,置管成功率较高,达到97.78%,且稳定性较好。失败的一例实验血管深度为3.22 mm,血管半径为1.41 mm,该血管位于皮肤表层且血管半径较小,血管情况较为复杂,也存在人为原因导致靶血管位置发生轻微偏移,穿刺置管失败。在临床实际穿刺过程中,医护人员会根据实际情况选择血管状况较好的位置进行穿刺,尽可能避免在表浅且纤细的位置进行穿刺操作。
6 结论
在可视化技术快速发展的时代,穿刺过程对于自动化的要求也越来越高。本文所述的自动静脉穿刺系统以STM32F105为控制核心,结合机械机构设计、控制电路以及穿刺过程分析,实现了穿刺装置的设计,能够准确地完成控制进针动作,具有较好的稳定性,达到了预期的控制目标。
[参考文献]
[1] Mccann M,Einarsdóttir H,Van Waeleghem JP,et al.Vascular access management: an overview[J].J Renal Care,2008,34(2):77-84.
[2] Walsh G.Difficult peripheral venous access: Recognizing and managing the patient at risk[J].J Assoc Vasc Acc,2008,13(4):198-203.
[3] 祖重阳,赵丹丹,赵微微,等.超声引导下改良Seldinger技术PICC置管在重症监护室的临床实践[J].中国妇幼健康研究,2017,(S1):56-57.
[4] 郑雪艳,华茂,潘亚萍.彩超引导行上臂PICC穿刺的护理研究[J].包头医学院学报,2011,27(5):57-58.
[5] 郭克友,贾海晶,王燕青.上肢静脉超声图像管径的测量与深度矫正[J].军事医学,2017,41(6):516-519.
[6] 郭菁莘,高德东,李丽荣.针穿刺软组织实验与穿刺力力学建模[J].青海大学学报(自然科学版),2014,32(3):37-42.
[7] 霍亮生,黎进远,王燕青,等.自动静脉穿刺装置及控制系统研究[J].中国医疗器械杂志,2017,41(3):200-203.
[8] 瓮嘉民,陈志武.基于STM32F105的动态自动称重系统设计[J].仪表技术与传感器,2012,(11):111-113.
[9] Li C,Sun P.The research and implementation of airborne flight data recorder based on STM32[A].International Industrial Informatics and Computer Engineering Conference[C].2015.
[10] 李昔华,胡卫军,王荣秀,等.基于STM32微处理器的IEEE1451标准模块设计[J].自动化与仪器仪表,2011,(1):37-39.
[11] 祁树胜,王丁旺.基于CP2102的USB-RS422/485接口电路的设计[J].西安航空技术高等专科学校学报,2009,27(3):10-12.
[12] 徐民,张博.基于CP2102/CP2103的RS232接口转换为USB接口的应用设计[J].国外电子元器件,2008,(5):15-17.
[13] Sharma M,Agarwal N,Reddy SRN.Design and development of daughter board for USB-UART communication between Raspberry Pi and PC[A].International Conference on Computing, Communication & Automation[C].New York:IEEE,2015:944-948.
[14] 沈兵虎.反馈式开关电源芯片LM2587在模拟汽车供电系统中的应用[J].测控技术,2006,(12):81-83.
[15] 刘虎,张仁杰,刘振,等.基于ARM和TMC262的步进电机运动控制系统[J].仪表技术与传感器,2015,(10):57-59.
[16] 石星星.点胶机器人运动控制系统设计与路径规划研究[D].南京:南京航空航天大学,2012.
[17] 佚名.Keil支持STM32互联系列[J].电子技术应用,2009,(8):9.
猜你喜欢
中国医疗器械杂志(2022年5期)2022-12-06
辐射防护通讯(2022年1期)2022-11-23
辐射防护通讯(2022年1期)2022-11-23
中国医疗设备(2022年3期)2022-04-01
现代仪器与医疗(2021年1期)2021-06-09
中国生殖健康(2020年7期)2021-01-18
中华神经创伤外科电子杂志(2020年3期)2020-07-07
中国实用医药(2019年33期)2019-12-30
中国医学装备(2018年12期)2019-01-03
作文周刊·小学一年级版(2018年25期)2018-10-20
