基于工业机器人的存储工作站设计
2018-05-07 06:39林国浩郭永灿梁耀友陈学维蔡瑞浩
装备制造技术 2018年2期
林国浩,郭永灿,梁耀友,陈学维,蔡瑞浩
(华南理工大学广州学院,广东 广州510800)
0 引言
随着电商的兴起,物流的物品流通量巨大,其中起着承上启下作用的仓储就显得格外重要,但是目前传统的仓储方式并不能跟上物流飞速发展的脚步,亟需新仓储方式和系统的研究。2015年成立的Geek+科技公司研究出了“货到人”方式的存储工作站,拣选人员只需根据显示屏和电子标签的提示,从指定货位拣取相应数量的商品放入订单箱即可,减少了之前“人到货”所用的时间。在2016年,京东研究出了机器人与视觉系统结合的存储工作站,使分拣物品速度达到一秒一个。但是,目前市面上大多数存储工作站都不适合中小型仓库,因为其成本高,结构复杂[1]。为此,本文拟在能完成智能存取的前提下,研究轻便型存储工作站,推动基于工业机器人的存储工作站在中小型企业中的普及应用。
1 存储工作站的结构组成
存储工作站主要由控制中心、执行机构、人机交互、检测器件及其它机械器件构成。
控制中心:三菱Fx2N-4AD 32MR/MT型PLC,用于信息处理与命令发送。
执行机构:ABB IRB1410机器人,用于物品搬运。
人机交互:三菱GOT1000触摸屏,用于系统与使用者之间的信息交流。
检测器件:JHBS型箔式荷重传感器,EJ-30N2型常闭扩散传感器,用于限定物品规格。
其它机械器件为储物箱、电磁铁与储物架。由于存取物品多种多样,在存取过程中,需先将物品先放置于储物箱内,再由机器人抓取储物箱存放至储物架。为在机器人编程中运用偏移指令,储物箱需为已知尺寸的统一规格,本项目调试用箱规格为长350 mm、宽 250 mm、高 200 mm.
电磁铁由一个电磁发生器与多个底座构成。电磁发生器安装于机器人末端执行器,底座分别安装于各个储物箱,以实现机器人对箱子的抓取。本项目选用GOB-80/35/22型号电磁铁,可提供80 kg吸力。
储物架为储物箱的最终存放处,为在机器人编程中运用偏移指令[2],储物架尺寸需已知且行列分布均匀。本项目选用储物架尺寸为长1 000 mm、宽500 mm、高1 700 mm,取3行3列进行调试。具体应用中根据箱子与储物架尺寸,行列数可在程序中进行增减。
另外,为应对实际布局中储物架与机器人相对位置存在偏差的问题。本项目在储物架指定位置建立工件坐标[3,4],当储物架与机器人相对位置改变时,通过重新定义工件坐标,机器人程序便可在新的储物架位置上准确运行。如图1所示。

图1 储物架坐标校准
在存储工作站中,各部件之间可互相进行信息的通讯与控制,系统原理结构图如图2所示,空间结构如图3.

图2 原理结构图

图3 空间结构示意图
2 存储工作站机构的硬件分析
硬件连接思路为:系统开始时,机器人处于原点待命,传感器通电开始监测,使用者把物品放置于储物箱后,在触摸屏开始界面选择存或取件,存取件判定条件以gi1信号的形式告知机器人[5,6],存件时,通过传感器检测物品是否符合规格,若符合则选择存放位置并设定密码,位置以gi1信号形式告知机器人,机器人运作,若不符合则返回存件界面,取件时选择位置并验证密码,若密码不正确,返回取件界面,若正确,则位置以gi1信号形式告知机器人,机器人运作。运作完成后机器人返回原点待命。工作流程如图4所示。

图4 工作流程图
物品放置到工作托盘上时,两个常开红外传感器与PLC的X1、X2连接,当两个都不接通时,则高度符合要求。电磁铁的开闭由机器人间接控制,机器人输出信号到PLC的X04端口时,与PLC的Y03端口连接的电磁铁则会开启,工作位置点由PLC的Y01、Y02、Y04、Y05共同决定,输出4路信号到机器人内部的X输入端,组成一个4位二进制的信号,机器人内部程序把二进制信号转化为十进制信号gi1,如图5所示为PLC输入输出端电气图。

图5 PLC输入输出端电气图
3 存储工作站的软件分析
本设计中的软件应用主要是集中在人机交互的功能上,编写触摸屏的界面必须遵循以下原则:各界面之间必须有逻辑性,便于引导使用者操作;各界面必须清晰快速地让使用者获取到有用信息;时效性,让使用者能在第一时间了解到系统物品与系统的现状[6]。
存储工作站的触摸屏显示页面如图6所示,各项功能为:
(1)选取使用系统的存或取件功能。
(2)检测存放物品是否符合规格,若不符合,则出现警告界面。
(3)在符合条件情况下,触摸屏显示位置选择界面。
(4)为提高安全性,存件时需要客户设定取件密码,当取件时只有输入正确的密码才能进行取件操作。
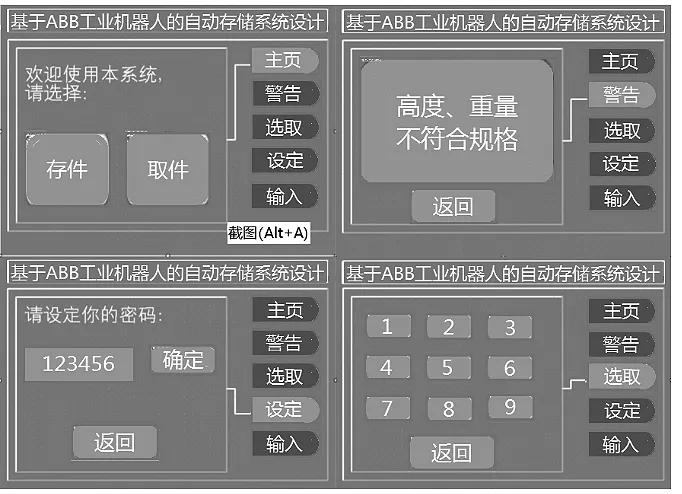
图6 触摸屏显示界面
4 调试与改进
(1)双线圈问题:系统使用二进制信号发送方式,同一个线圈在不同语句中被多次触发。
解决方法:把触发同一个线圈定的语句以并联的形式合成一条语句。
(2)继电器问题:信号通讯中起保护作用的继电器反应慢,例0111和0011的一号位和二号位重复,若继电器的反应速度较慢,0111信号会被机器人读取为0011信号。
解决方法:延长机器人读取信号的时间,让继电器有更长的时间进行反应,即在机器人判断信号程序前加上延时语句。
(3)箱子问题:塑料箱子容易产生变形而下垂,容易与柜子发生碰撞。
解决方法:在位移指令[7],添加增量,如
MoveJ Offs(p610,reg13,reg14*2-reg15,0),speed9,z50,tool1WObj:=wobj2;Reg15
为箱子下垂距离,Y方向位移距离减去箱子下垂的距离,防止箱子因下垂与柜子发生碰撞。
5 结束语
经过调试,实现了使用者通过触摸屏来控制工业机器人存放物品的目的。系统智能化特点如下:
(1)系统可根据物品的重量规划搬运方案,结合储物架承重,储物架三层分放不同重量物品。
(2)利用程序在储物架处建立参考坐标系,使储物架与工作站协同工作。
(3)以第一工位为基准,使用偏移指令得出后续工位,方便修改。
参考文献:
[1]毕 胜.国内外工业机器人的发展现状[J].机械工程师,2010(07):5-8.
[2]叶 晖,管小清.工业机器人实操与运用技巧[M].北京:机械工业出版社,2010.
[3]郭洪红.工业机器人运用技术[M].北京:科学出版社,2008.
[4]叶伯生.工业机器人操作与编程[M].武汉:华中科技大学出版社,2016.
[5]张培艳.工业机器人操作与应用实践教程[M].上海:上海交通大学出版,2009.
[6]胡 伟.工业机器人行业应用实训教程[M].北京:机械工程出版社,2015.
猜你喜欢
哈哈画报(2021年12期)2021-02-28
模具制造(2019年10期)2020-01-06
装备制造技术(2019年12期)2019-12-25
小雪花·初中高分作文(2019年8期)2019-10-07
中国储运(2019年1期)2019-01-09
电子制作(2018年19期)2018-11-14
知识就是力量(2018年7期)2018-07-11
好孩子画报(2017年5期)2017-07-14
阅读与作文(小学高年级版)(2017年5期)2017-06-01
阅读与作文(小学高年级版)(2016年5期)2016-05-10