目前基坑监测中常用自动化测量方法的比较分析
2018-05-04 07:25:38李伟强
城市勘测 2018年2期
李伟强
(上海申元岩土工程有限公司,上海 200011)
1 引 言
随着我国各地城市基础设施建设的发展,城市地下空间的开发利用也进入了快速发展期,地下空间项目规模以及施工难度也越来越大,基坑施工周边环境也越来越复杂,各种大型基坑工程也不断涌现,工程实施过程中受到基坑开挖、大气降水以及施工动载等许多不确定因素的影响,尤其在高地下水位的软土地基中开挖基坑工程更是存在着一定的风险性,而基坑的周边环境在开挖影响范围内又分布着各种市政管线,建筑物等,若因施工控制措施不当便会导致管线和构筑物变形过大而破坏甚至不能正常使用,造成很严重的经济损失和社会影响,但是在目前的计算理论框架内,对基坑工程及周边环境的各种复杂影响还不能进行准确的预测,因此在基坑施工过程中,用精密仪器和科学的方法对支护结构、周边环境进行监测就变得至关重要。通过监测来及时发现围护结构以及周边环境变化发展趋势,及时反馈信息,才能指导施工达到有效确保基坑及周边环境安全的目的。
与此同时,基坑监测的手段也在不断更新中,在如此重要的环节中,为及时掌握变形情况,越来越多的项目对动态监测数据愈发重视,因此,各种自动化测量的新技术、新方法被应用到实际工程中,在基坑监测的各种物理量诸如应力、应变、温度等的监测上,通常采用可靠的传感器,测量频率等变化等来计算变化量,并且通过线缆连接数据采集箱比较容易实现自动化测量,但是在各种几何量比如垂直及水平位移、倾斜、深层位移量的测量上,受制于精度要求,测量条件、技术方法上实现自动化的要求要高得多。本文参考工程实例来重点比较分析在目前工程应用上常见的三种几何量自动化测量方法即:电水平尺、静力水准,全站仪自动化测量,并采用传统精密水准测量方式加以校核比对。
2 电水平尺自动化测量
2.1 测量原理
电水平尺的核心部分是一个电解质倾斜传感器,其测量倾斜角的灵敏度高达1秒(相当于在 1 m的直尺上由于两端有5微米高差形成的倾角)。将上述电解质倾斜传感器安装在一支空心的直尺内,就构成了电水平尺(EL Beam Sensor)。尺身一般长 2 m~4 m,用锚栓安装在隧道道床(结构物)上。接着将倾角传感器调零,并锁定在该位置。道床(结构物)的沉降会改变梁的倾角,沉降量(d)可按公式“L(sin1-sin0)”算出。此处,L是梁的长度;1是现时倾角值;0是初始倾角值。若将一系列电水平尺首尾相接地安装在隧道纵向上的隧道结构上,形成上述的所谓“尺链”,就可得出“尺链”范围内的竖向位移曲线。其原理如图1所示。

图1 电水平尺监测竖向位移原理示意图
2.2 项目案例
上海地铁某车站基坑为三层岛式车站,开挖深度为 23.4 m~25.4 m,车站总长 191 m,外包宽度 20.87 m。车站附属结构包括有2个出入口和3个风亭。电水平尺自动化监测点布设在基坑南侧在运营中的另一条地铁站台轨道内,测试元件采用美国Sinco公司的EL电解质式梁式传感器,该传感器通常用于监测建筑物的不均匀沉降,标准量程为±40′,分辨率为1″(±0.005 mm/m),灵敏度为±3″(±0.015 mm/m)。每个电水平尺传感器旁边布设一个人工沉降测量点,采用精密水准仪按二等水准测量要求进行施测,电水平尺线路初始端进行数据修正,点位略图如图2所示。
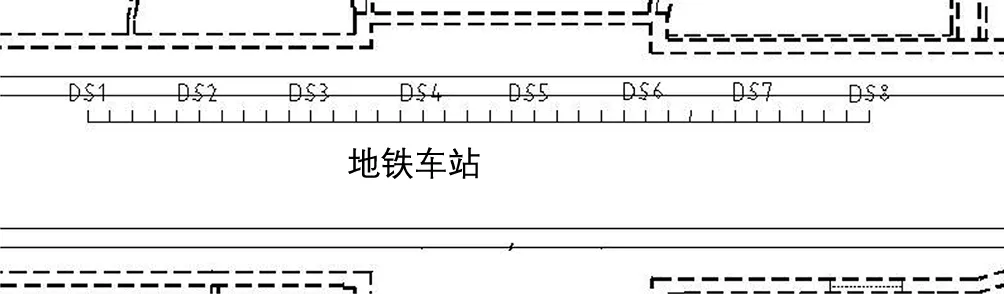
图2 电水平监测点布置示意图
2.3 数据统计
整个线路累计沉降量及特征点的不同历时的沉降量数据统计如表1、表2所示,变化曲线图如图3、图4所示。
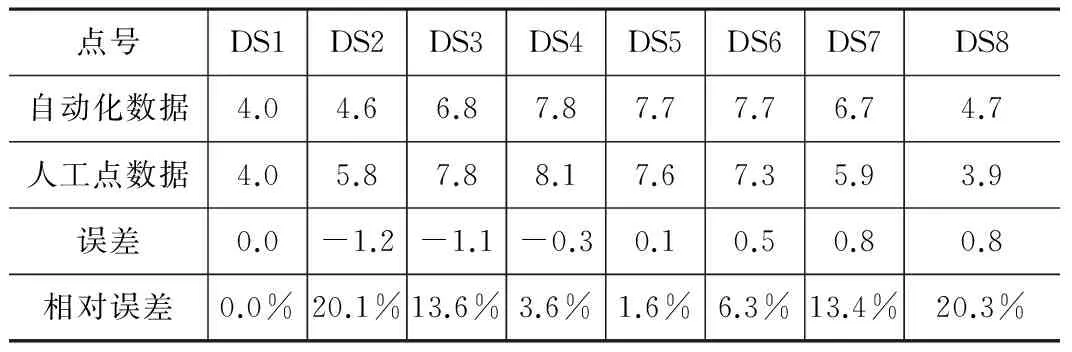
电水平线路数据汇总(单位/mm) 表1
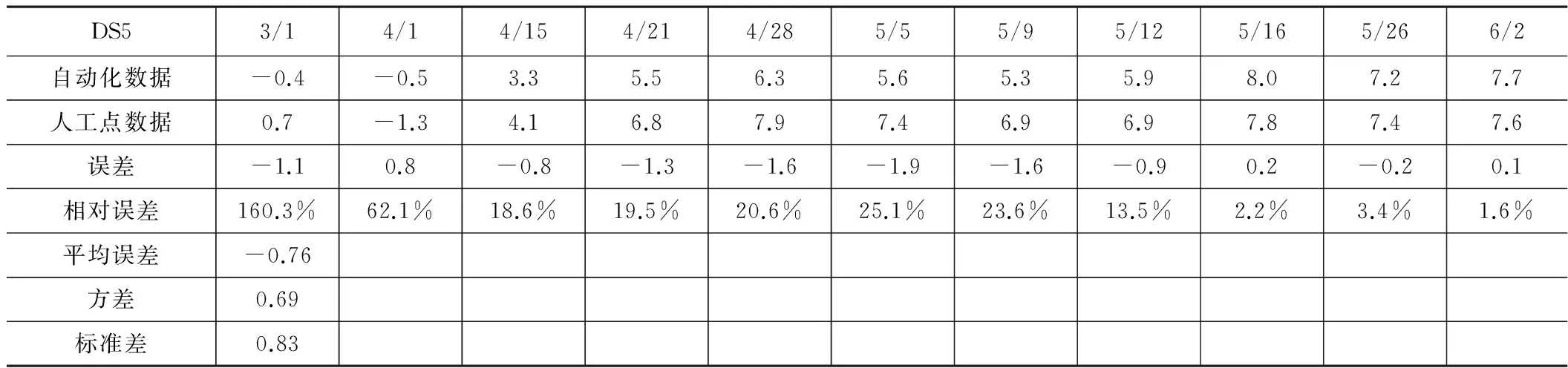
电水平特征点DS5历时数据(单位/mm) 表2
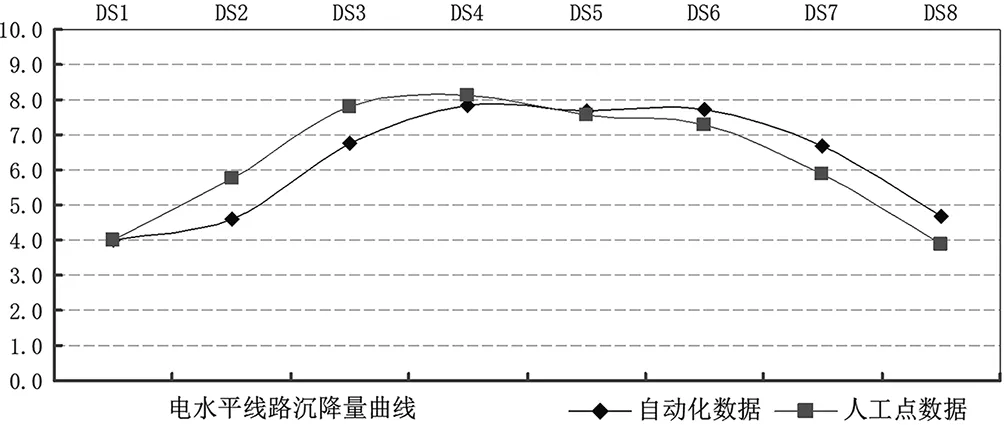
图3 电水平线路沉降曲线图

图4 电水平特征点DS5历时沉降曲线图
3 静力水准自动化测量
3.1 测量原理
静力水准系统依据连通管原理的方法,测量每个测点容器内容器底面安装高程与液面的相对变化。再通过计算求得各点相对于基点的相对沉降量。仪器由主体容器、连通管、电容传感器等部分组成。当仪器主体安装墩发生高程变化时,主体容体相对于位置产生液面变化,引起装有中间极的浮子与固定在容器顶的一组电容极板间的相对位置发生变化,通过测量装置测出电容比的变化即可计算得测点的相对变化,如图5所示。
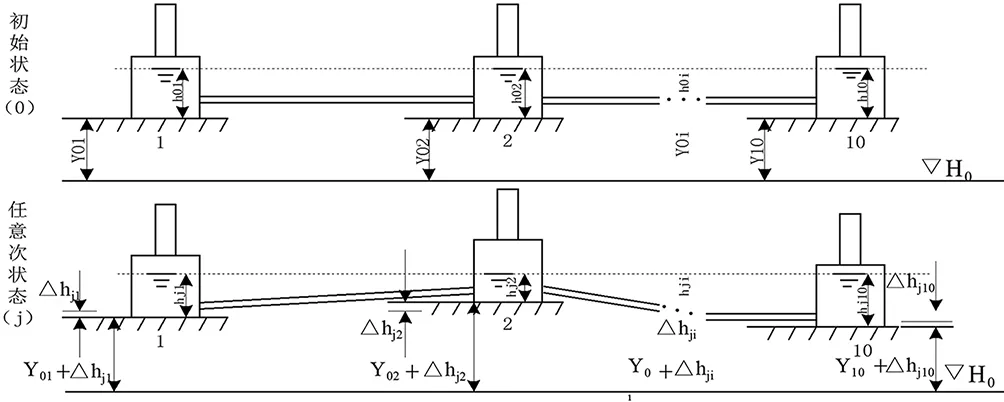
图5 静力水准测量原理示意图
3.2 项目案例
该项目位于上海世博会片区,基坑开挖面积约 38 000 m2,基坑延长米约为 791 m,开挖深度在 11.40 mm~18.60 mm之间。采用地下连续墙围护,支撑形式为三道钢筋混凝土水平支撑,环境保护等级为一级。静力水准自动化监测点布设在基坑东侧的共同管沟内。静力水准传感器采用美国基康振弦式传感器,标准量程 150 mm,传感器精度±0.1%F·S,传感器灵敏度0.025%F·S。每个静力水准传感器旁边布设一个人工沉降测量点,采用精密水准仪按二等水准测量要求进行施测,静力水准线路初始端进行数据修正,点位略图如图6所示。
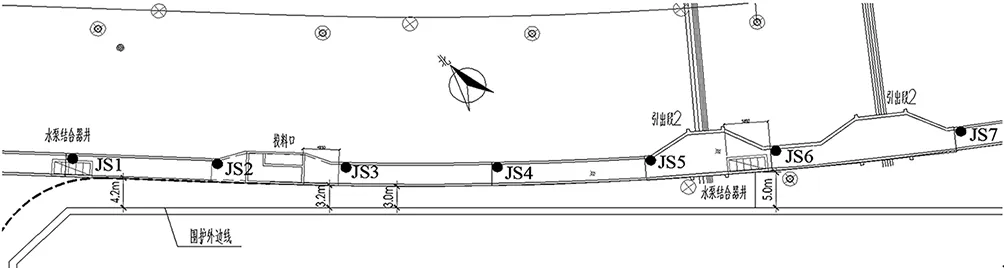
图6 静力水准监测点位布置示意图
3.3 数据统计
整个线路累计沉降量及特征点的不同历时的沉降量数据统计如表3、表4所示,变化曲线图如图7、图8所示。

静力水准线路数据汇总(单位/mm) 表3

静力水准特征点JS5历时数据(单位/mm) 表4

图7 静力水准线路沉降曲线图

图8 静力水准特征点JS5历时沉降曲线图
4 全站仪自动化测量
4.1 测量原理
测量机器人是一种能代替人进行自动搜索、跟踪、识别和精确照准目标并获取角度、距离、三维坐标以及影像等信息的智能型电子全站仪,它是在全站仪基础上集成步进马达、CCD影像传感器构成的视频成像系统,并配置智能化的控制及应用软件发展而成。系统主要工作方式是在容易发生形变的部位安装棱镜,通过软件驱动全站仪按照预定的方式自动定期测量这些棱镜所在部位的三维坐标,对多次测量的坐标进行变形位移量的计算,以达到监测预防事故的发生目的。测量时用全站仪按照极坐标测量原理进行观测,测量各点的三维坐标。对于多余观测采用最小二乘原理求得最佳值,对于一个时间段内的数据,采用中值计算技术。如图9所示,全站仪的设站点0为原点,测站的铅垂线为Z轴,以定向方向为X轴,建立坐标系0-XYZ,则全站仪测量P点的观测值为水平角、竖直角,斜距S,则计算出P点的独立坐标系下的坐标。
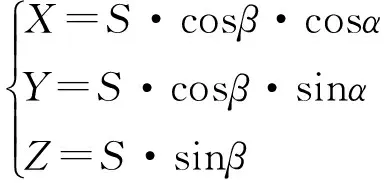
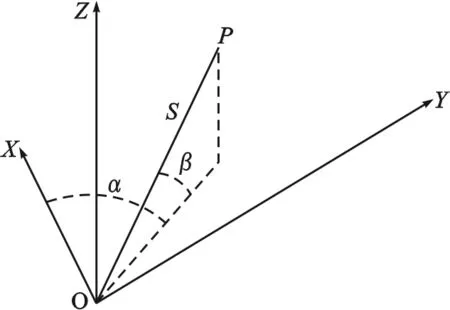
图9 全站仪极坐标测量原理
4.2 项目案例
该项目主要为试验段,在上海某高架路下进行管幕法钢管顶进施工,在工作井、接收井开挖施工、钢管幕顶进施工及矩形箱涵顶进施工过程中须对重点路面全面实施监测,本次测量采用TCA2003全站仪观测,测角精度为0.5″,100 m的监测范围内由测角所引起的最大误差为 ±0.12 mm;仪器的测距精度为 1 mm ±1 ppm,100 m的距离由测距所引起的误差为±0.1 mm,距离测量采用四测回观测仪器引起的误差为 ±0.5 mm。由于本项目主要针对垂直方向的变化所以在每个测点棱镜旁边布设一个人工沉降测量点,采用精密水准仪按二等水准测量要求进行施测,全站仪设站点进行数据修正,点位略图如图10所示。
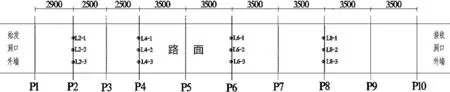
图10全站仪自动化监测点布置示意图
4.3 数据统计
整个测量断面的累计沉降量及特征点的不同历时的沉降量数据统计如表5、表6所示,变化曲线图如图11、图12所示。

全站仪测量断面数据汇总(单位/mm) 表5
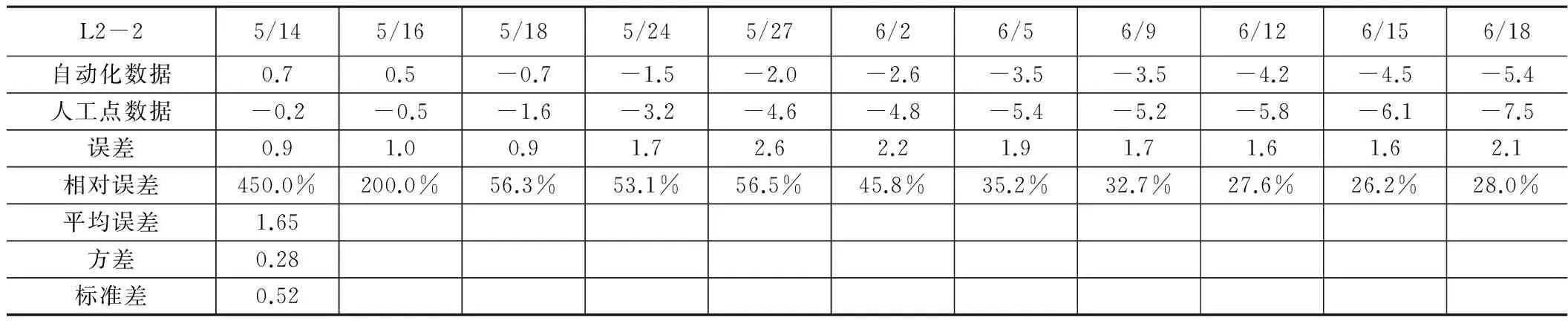
全站仪测量特征点L2-2历时数据(单位/mm) 表6
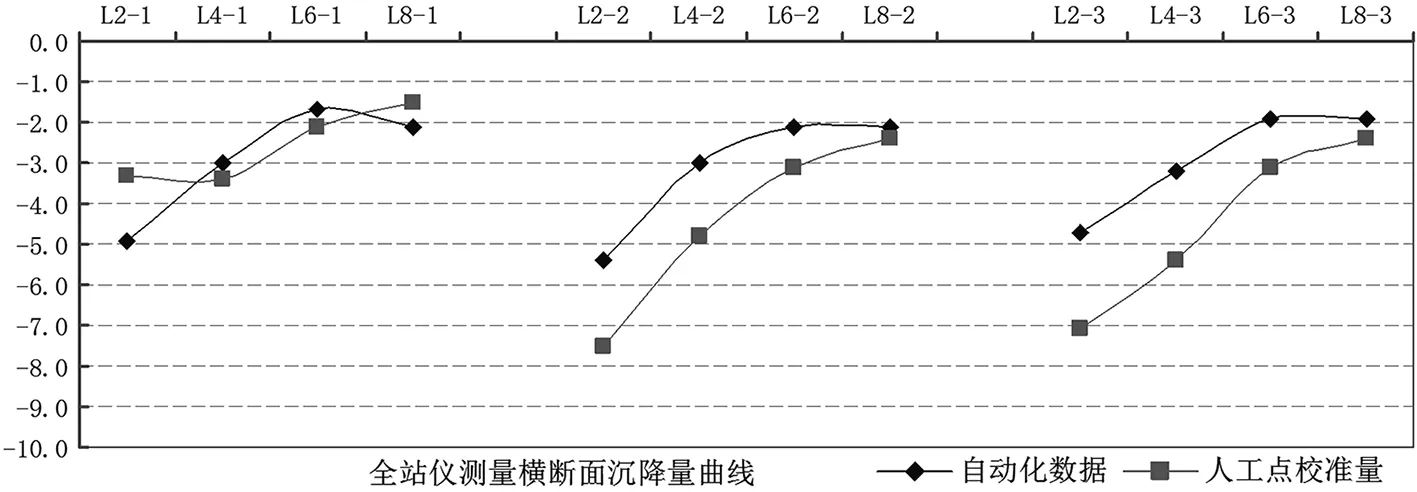
图11 全站仪测量横断面沉降曲线图

图12 全站仪测量特征点L2-2历时沉降曲线图
5 分析与总结
本文采用的数据在三个工程实例中变化量均在 10 mm左右,在变形监测中对数据精度要求较高的情况下,有利于分析比对三种手段的数据分布情况,电水平尺及静力水准自动化测量的起始点以及全站仪自动化的设站点均采用人工测量数据进行校核修正,保证了数据的准确性和可靠性,三个工程实例数据的误差对比如表7所示。
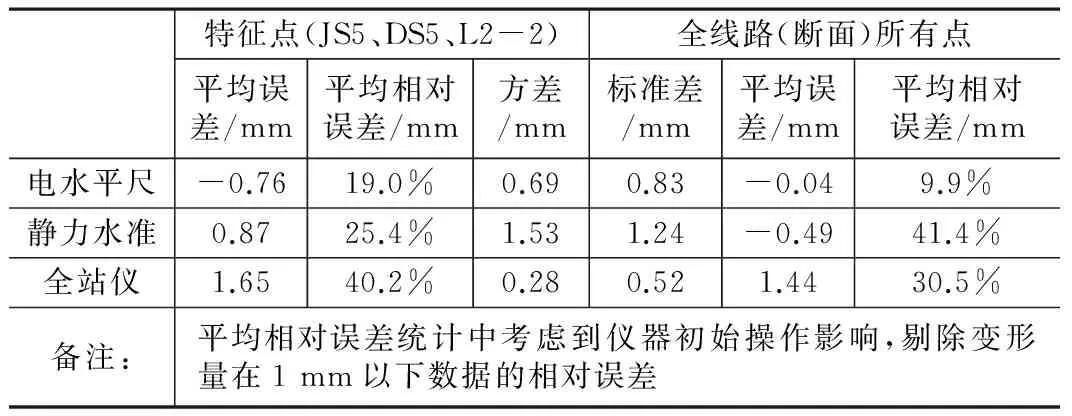
三种测量方法误差数据统计 表7
电水平尺测量方法的平均误差和相对误差较小,精度比较高,全站仪机器人方法的误差的方差及标准差数值较小,说明误差的离散度比较低,通过其历时曲线可以看出,全站仪测量方法在线路的平差计算上以及对测站点改正上还可以进一步进行优化。在变形量增大后,静力水准与电水平尺由于线路优势自动化数据与人工数据拟合度更好,全站仪测量每个测点相互独立,数据质量能保持较高的稳定性。
在三种自动化测量的使用方面包括从安装到运行都具有各自不同的特点、难点,因此在实际应用中根据项目本身的特点来匹配最合适的应用方式。
静力水准的使用特点是安装时高差不能太大,安装难度较大,静力水准共有三根管线需与相邻仪器连接组成系统,从上至下依次为液体管、通气管和通讯线缆,正确安装并需保证各自安装质量是系统运行的重点。电水平尺的安装特点与静力水准相似,但安装调平难度较大。在这两种自动化方式中如果线路上有传感器故障或者传感器数据异常则会系统性影响整条后续线路的沉降量,因此对于查找问题比较困难,因此在关键接点加入人工检核修正就变得非常重要。
全站仪测量机器人的使用特点是监测点安装方便可以散点布设,实时进行三维数据采集,三维数据的参考性比较大,平面数据精度较高,垂直方向数据精度相对较差,监测点之间相互独立,数据不会相互影响,查找问题相对容易,但实施过程中须考虑温度和气压的改正值,由于测点与设站点要相互通视,所以对于曲线形线路需要采用多机系统,链接点一般采用360°棱镜,多机系统下测量单位必须具有强有力的控制网图形设计和计算能力才能保证达到很高的精度要求。
通过这些工程实例应用不难发现这些自动化手段的共同优点是实时测量高差变化值,数据采集频率灵活而且精度高,数据的变化趋势与实际情形吻合,满足工程需求,相对于人工测量有着明显的优势。自动化监测系统是一个系统工程,针对不同的项目需求采用不同的应对手段,自动化变形监测的实施和时代新技术的发展息息相关,也是行业发展的必然趋势。
[1] GB12897-2006. 国家一、二等水准测量规范[S].
[2] GB50026-2007. 工程测量规范.
[3] GB50911-20. 城市轨道交通工程监测技术规范.
[4] 潘国兵,曾广燃,吴森阳. 基于GPS与GIS的土石坝自动化监测预警系统研究[J]. 长江科学院院报,2013(9):110-113.
[5] 包欢,徐忠阳,张良琚. 自动变形监测系统在地铁结构变形监测中的应用[J]. 测绘学院学报,2003(2):76-79.
[6] 高爱林,张健全,张建旭. 基于无线传输的自动化监测系统在地铁中的应用[J]. 城市快轨交通究,2011(4):35-38.
[7] 戴加东,王艳玲,褚伟洪. 静力水准自动化监测系统在某工程中的应用[J]. 工程勘察,2009:20-23.
[8] 田林亚,夏开旺,李鹏. 高程数字模型三角高程测量在堤防施工沉降监测中的应用[J]. 测绘通报,2004(11)36-39.
[9] 张正碌.工程测量学[M]. 武汉:武汉大学出版社,2005.
[10] 黄声享,尹晖,蒋征. 变形监测数据处理[M]. 武汉:武汉大学出版社,2003.
猜你喜欢
防爆电机(2022年1期)2022-02-16 01:13:56
矿山安全信息(2021年21期)2021-07-04 06:33:32
昆钢科技(2021年6期)2021-03-09 06:10:24
北京测绘(2021年1期)2021-02-05 11:43:46
矿山安全信息(2020年37期)2020-12-26 07:25:58
装备制造技术(2020年4期)2020-12-25 05:26:00
矿山安全信息(2020年2期)2020-03-05 05:13:56
矿山安全信息(2020年3期)2020-03-04 10:18:08
家庭影院技术(2018年11期)2019-01-21 02:20:42
体育科学研究(2015年5期)2015-02-28 17:06:39