三维激光扫描技术在历史建筑物测绘中的应用
2018-05-04 07:31刘永锋李翅周凯李浩刘传逢
城市勘测 2018年2期
刘永锋,李翅,周凯,李浩,刘传逢
(武汉市测绘研究院,湖北 武汉 430022)
1 引 言
三维激光扫描技术是一种无须接触测量目标就可以快速获取物体表面的三维坐标数据,然后利用相关的后处理软件来构建出扫描实体真实的三维模型的测量技术,又称为“实景复制技术”[1]。利用该技术所获取的三维坐标数据被称为“点云”数据,可以实时、快速、动态、真实地反映客观事物的现状,为科学准确地建立数字模型提供一种全新的技术手段。与激光测距技术中点对点的测量方法不同的是,三维激光扫描技术使传统的人工单点数据获取变为连续自动获取批量数据,不仅极大提高了测量的速度,也提高了测量的精度和密度,是目前国内外测绘领域研究关注的热点之一[2~5]。
在以往涉及建筑物平立面测绘的工程中,通常采用的办法是架设全站仪获取建筑物的三维点坐标,结合卷尺及测距仪量取建筑物的细部尺寸,同时需要绘制草图,然后将测量数据展绘到CAD等绘图软件中,依照外业草图绘制建筑物平立面图。这种方法不仅人员投入多、工作量大、工期长,而且在针对较为复杂的建筑物时很难满足精度要求,有时针对特别复杂的异形建筑物时甚至束手无策[6,7]。
本文以受武汉地铁集团有限公司委托的关于胜利仓库地铁博物馆改造项目为实例,采用徕卡公司生产的高精度地面三维激光扫描仪P40,结合与仪器配套的三维激光点云数据处理软件Cyclone 9.1及AutoCAD激光点云数据处理插件CloudWorx,探索了地面三维激光扫描技术在历史建筑物测绘中的应用。
2 理论基础
从扫描方式上来划分,地面三维激光扫描系统分为移动式扫描系统和固定式扫描系统两种。固定式扫描系统类似于传统测量中的全站仪,不同的是固定式扫描仪采集的并不是离散的单点三维坐标,而是物体表面的海量三维坐标数据。从硬件结构上来看,地面三维激光扫描系统主要由三部分构成:扫描仪、控制器和电源供应系统。激光扫描仪又包括激光测距系统和激光扫描系统,同时也集成了CCD和仪器内部控制及校正等系统[8]。
地面三维激光扫描系统一般使用仪器自定义的坐标系统:坐标原点位于扫描仪中心,X轴在横向扫描面内,Y轴在横向扫描面内与X轴垂直,Z轴垂直于横向扫描面,如图1所示。激光测距系统采用脉冲式测距、相位式测距、激光三角法测距等方式测算出原点O距激光扫描点的距离S;激光扫描系统通过内置伺服驱动马达系统精确控制多面反射棱镜的转动,使脉冲激光束沿横轴方向和纵轴方向快速扫描,测量得到每个脉冲激光的横向扫描角度α和纵向扫描角度θ。由此,可计算出扫描激光点在被测物体上的三维坐标为[9]:

(1)
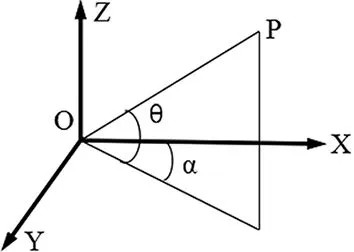
图1 扫描坐标系统
3 作业流程
胜利仓库地铁博物馆改造建筑物结构及平立面测量项目的委托方为武汉地铁集团有限公司,该项目需要以线划图的形式(平面图、立面图)还原位于江岸区四维路、胜利街交叉口的A、B两栋历史建筑的结构原貌,为地铁博物馆改造的设计、施工提供必要的第一手资料,属于一种典型的逆向工程。A栋建筑为近代租界区德商瑞记洋行,原为三层建筑,后其上又加建一层,保留建筑面积为 4 200 m2,如图2所示。B栋建筑与A栋建筑紧邻,为近代租界区金银券仓库,保留建筑面积为 9 000 m2,如图3所示。该历史建筑年代久远,内部结构复杂,且墙体、梁及柱均变形严重,在对建筑物进行平立面测绘及面积测量时,如果采用常规全站仪设站方式,须逐层逐边进行量测后再进行手工绘制分层平面及立面图。这样做不仅内外业工作量巨大,且图形不规则,精度难以达到要求,这给传统测绘带来了巨大挑战。基于以上考量,此项目采用徕卡公司最新生产的第八代高精度三维激光扫描仪P40进行外业数据的获取,并采用配套的点云数据处理软件Cyclone 9.1及AutoCAD插件CloudWorx进行后期数据的处理。整个作业流程分为外业扫描过程和内业处理两部分,如图4所示。

图2 A栋建筑

图3 B栋建筑

图4 作业流程
3.1 外业扫描
(1)现场踏勘
根据历史建筑物内部和外部的实际情况,确定出合适的仪器架设位置,并根据现场情况设计合适的测站数,以确保选择的测站能够覆盖需要扫描的全部区域,并保证点云精度和密度。
(2)控制点布设
地面三维激光扫描仪进行扫描时使用的是仪器自定义的坐标系统,为了后期将完整的拼接结果转换到统一坐标系(国家、地方),就需要在采集点云数据前在踏勘现场的基础上布设、测定高密度、高精度的控制网,然后根据扫描设备的特点和扫描对象的色彩、材质等属性进行扫描测绘。为满足建筑工程规划验收测量精度的要求,本工程以《城市测量规范》(CJJ/T8-2011)及《卫星定位城市测量技术规范》(CJJ/T 73-2010)为依据布设控制网。控制网的布设需要参考一下几个原则:控制网的精度要高于建筑物建模要求的精度;控制网中各相邻控制点之间要通视,即要求一个控制点至少与两个控制点通视;控制网布设的网型要合适,能使得扫描仪完全获取建筑物数据;控制点与被测建筑物之间的距离最好保持在 50 m以内来提高精度。
(3)标靶布设
由于单站扫描范围的局限性,一个完整的工程往往需要进行多次转站扫描。每站扫描数据都有一个独立的坐标系,在将多站数据进行拼接时需要将多站数据转换到一个坐标系中,在坐标转换过程中,通过对公共点的测量来计算转换参数。为了保证转换精度,公共点一般采用特制的球面(形)标靶和平面标靶。标靶的布设要满足以下几个原则:相邻测站间有两个或两个以上的公共标靶;标靶不能和测站点分布在同一直线上;标靶必须和测站通视,且距离测站不宜太远。
(4)点云数据采集
目前国内外生产的地面三维激光扫描仪的品牌和类型较多,性能和精度也各有差异。根据工程要求对比选型后,本项目选择采用徕卡三维激光扫描仪ScanStation P40进行点云数据的获取,其主要性能参数如表1所示。扫描步骤大致分为仪器安置、仪器参数设置、开始扫描、换站扫描等几个过程。外业数据的采集工作耗时2.5天,共架设103站,获取到包括测区全部区域在内的29亿个三维点。

P40三维激光扫描仪性能参数 表1
3.2 内业处理
点云数据的后处理使用与硬件配套的点云数据处理软件Cyclone 9.1,建筑物平立面图的绘制及面积计算使用AutoCAD软件。整个点云数据后处理过程包括点云拼接、坐标系归一化、点云去噪、点云合并、点云切割及平立面图绘制等几个流程,具体处理步骤如下:
(1)点云拼接与坐标系归一化
点云拼接是通过一定的约束条件将多站点扫描数据配准到统一坐标系中的过程,拼接完成之后将得到一个项目的完整点云。一般有两种方式:基于标靶的拼接和基于点云的视图拼接。基于标靶拼接的前提是扫描仪现场在整平状态下的扫描站点与站点之间有两个或者两个以上的公共标靶,该方式的自动化程度较高;基于点云的视图拼接是利用站点之间扫描的公共区域进行的半自动拼接,该方式需要依靠人眼来识别曲率、轮廓线等特征,人为因素干扰较大。根据现场条件,项目采用两种方式混合拼接的方式,即基于标靶拼接与基于视图拼接两种方式结合在一起使用:在室外方便布设控制点的地方采用标靶拼接,室内不便布设控制点的地方采用视图拼接。具体步骤包括新建一个Registration,在Registration中添加相邻的站点数据,添加约束条件,拼接点云等,这一系列操作可以通过Registration菜单下的工具实现。如图5所示为所有站点点云数据拼接后的建筑物整体效果,图6为建筑物内部局部结构图。
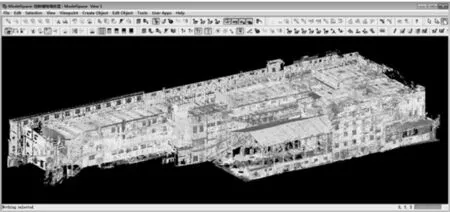
图5 完整点云数据
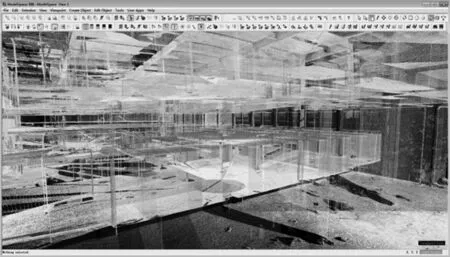
图6 部分内部结构
(2)点云去噪与点云合并
点云去噪是一种点云优化过程。在扫描仪的原始点云中往往包含若干对于成果处理有不良影响的点,去噪就是通过一定的处理手段,让有效点保留,无效点删除的过程。点云去噪可以通过Fence工具和Limit Box工具实现。点云合并也叫点云统一化,也是对点云进行优化的一种处理方式,目的是将整个视图中的多站点云统一处理为单一的合并点云,统一化处理完成后,点云的浏览、选择等操作都会在原有的基础上变得更加流畅。点云合并可以通过Unify Clouds工具或Merge工具实现。
(3)点云切割与平立面图绘制
点云的切割操作是为后续的轮廓线描绘做准备。利用Cyclone 9.1软件的Cutplane切片工具分别从水平和垂直的方向对点云数据进行切片处理,切片厚度根据具体情况调整,以能够直观清晰地看到建筑物墙体、门、窗、楼梯等构件的轮廓线为准。为了保证切片切割的面为水平或垂直方向,通常需要将Reference Plane参考面工具与切片工具一同使用。先根据某点建立XY、XZ或YZ方向的参考面,再通过参考面定义切片即可。切片厚度由实际需要决定,或者根据点云的扫描密度决定,扫描点云越密集,切片厚度可以设置得越薄,后续通过参考面生成的各种成果的精度也将更高。
由于项目要求的是恢复历史建筑物的原貌,而不完全是根据现场情况测绘出建筑物现状,这给工程的推进又加大了不小的难度。为了做到这一点,需要工程人员在平立面图绘制的整个过程中都要注意判断、区分建筑原貌部分和后期加盖部分。比如图7为工程人员现场拍摄的A栋一楼大厅的局部照片,图8为该部分的三维扫描点云数据。图中标记为“1”的部分是建筑物柱子的原貌,标记为“2”的部分为后期装修时在柱子外围包裹的一层贴砖。为了提取原始柱子的轮廓线,需要在柱子中间沿水平面切割点云数据。正确的裁切面应经过“1”处;否则,若在“2”处选择切面裁切将会使得柱子长宽变大,与原貌不符。

图7 A栋大厅照片

图8 A栋大厅点云图
梁是建筑物中重要的构件,项目需要准确地反映其长、宽及相对位置。在常规的建筑中,梁一般是横平竖直地规则分布,在该历史建筑物中有局部的梁表现出了特殊性。如图9所示,该部分有一段西南-东北走向的斜梁,利用传统测绘手段不仅操作困难,且难以准确确定横梁与斜梁的连接位置。然而将获取的点云数据导入CAD进行轮廓描线能轻松实现。最终还原出该局部梁的分布情况,如图10所示。
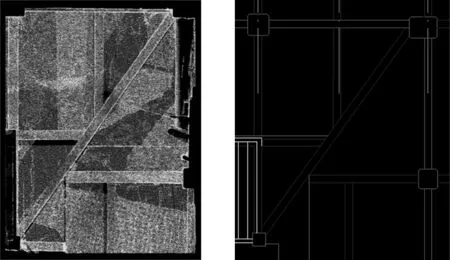
图9 B栋2层局部梁点云图 图10 B栋2层局部梁线划图
利用CloudWord插件中的导入ModelSpace视图功能将切割好的切片视图加载到AutoCAD软件中,再用CAD的画线功能绘制立面图和平面图,如图11所示。部分无法识别的细部可利用Measurements量测工具进行辅助绘制,点云量测需多次量测取平均值。由于树木或车辆遮挡而导致无法准确绘制尺寸的部位,则需要到现场使用常规方法进行补测。
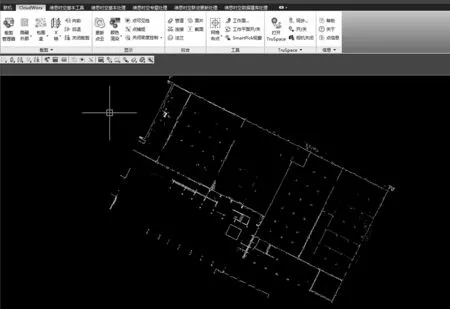
图11 在AutoCAD中绘制平立面图
最终的测绘成果包括A、B两栋建筑的各个立面图及分层平面图,如图12~图16所示(以B栋建筑部分成果为例)。
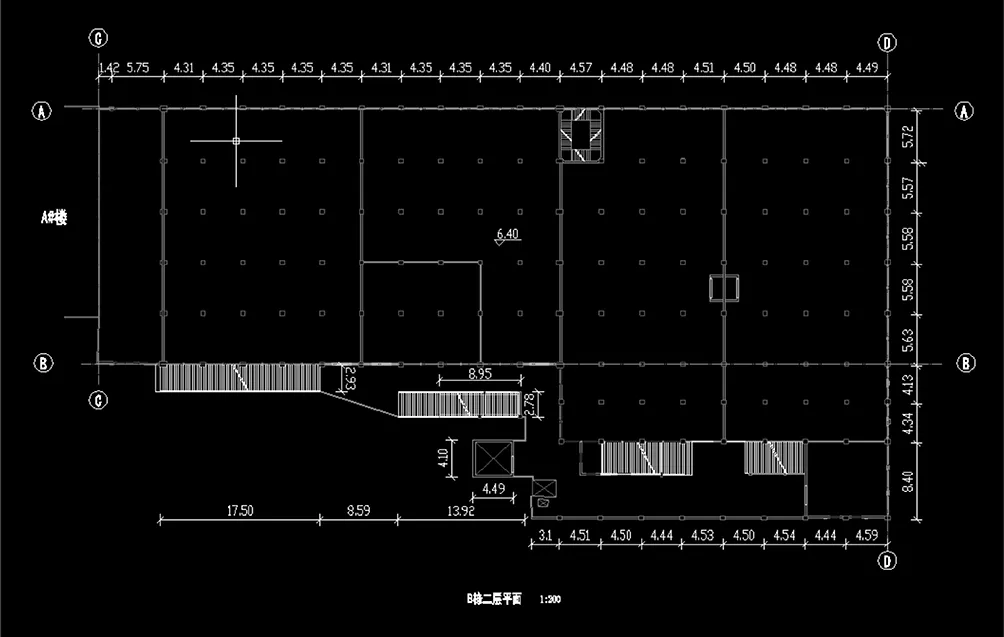
图12 B栋二层平面图

图13 B栋二层房顶平面
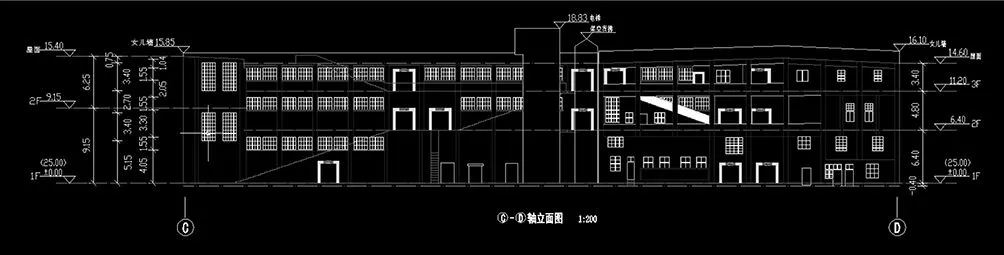
图14 B栋立面图(南)
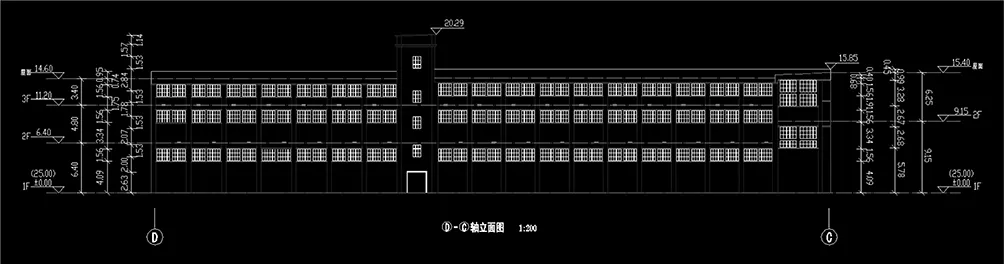
图15 B栋立面图(北)

图16 B栋立面图(东)
4 结论与展望
4.1 结论
地面三维激光扫描技术是近年来刚发展起来的一项高新技术,本文在对该技术的原理做了充分了解后,结合历史建筑物原貌恢复的实际工程项目,重点研究了该技术在结构复杂的历史建筑物测绘中的应用。通过布设控制网,使用徕卡P40三维激光扫描仪获取历史建筑物的点云数据,经过点云拼接、坐标系归一化、去噪、合并、切割、提取轮廓线等后处理操作步骤,最终以平立面图的成果形式恢复了历史建筑物的原貌。此项目的顺利完成验证了三维激光扫描技术应用于精细化建筑物测绘中的有效性及高效性,证实了三维激光扫描技术在解决传统测绘手段存在的“难测绘”、“精度低”、“工期长”等痛点方面具有极大的应用前景。同时,三维激光扫描可在不搭建脚手架,不与建筑物接触,最大程度减少对建筑物的影响的情况下进行扫描测量,这对于具有一定历史文化价值的异形建筑物具有重要的意义。
4.2 展望
随着地面三维激光扫描技术在国内外应用的日渐普及和深入,在各个工程领域都表现出了较好的技术优势,是科学技术和信息产业的一次新技术革新。地面三维激光扫描技术以其高效率、高采样率、高精度、高密度、非接触性等优势,在测绘领域有广泛的应用潜力。因此,在今后的实际工程项目实践中还有待进一步拓宽其应用范围,最大限度地发挥其在测绘领域的应用价值,如隧道土方测量、断面测量、变形监测、竣工测量等。另外,配套的数据后处理软件的功能开发及应用研究工作也要进一步深入开展。
[1] 马立广. 地面三维激光扫描测量技术探究[D]. 武汉:武汉大学,2005.
[2] 王星杰. 三维激光扫描仪在道路竣工测量中的应用[J]. 北京测绘,2012(4):21~25.
[3] 姜如波. 基于三维激光扫描技术的建筑物模型重建[J]. 城市勘测,2013,19(3):113~114.
[4] 李超. 三维激光扫描技术在城市特殊结构测量中的应用[J]. 测绘通报,2014(1):71~73.
[5] 张华. 移动式三维激光扫描系统在盾构隧道管片椭圆度检测中的应用[J]. 城市勘测,2015(4):103~106.
[6] 吕宝雄. 基于三维激光扫描的建筑立面测绘关键技术[J]. 西北水电,2015(5):30~32.
[7] 张平,黄承亮,朱清海等. 基于三维激光扫描技术的异型建筑物建筑面积竣工测量[J]. 测绘与地理空间信息,2014,37(5):222~224.
[8] 徐进军,余明辉,郑炎兵. 地面三维激光扫描仪应用综述[J]. 工程勘察,2008,12:31~34.
[9] 谢宏全. 地面三维激光扫描技术与工程应用[M]. 武汉:武汉大学,2016.
猜你喜欢
文萃报·周五版(2021年45期)2021-11-17
铁道建筑技术(2021年4期)2021-07-21
黑龙江水利科技(2020年8期)2021-01-21
小学生学习指导(低年级)(2019年9期)2019-09-25
模具制造(2019年3期)2019-06-06
测绘通报(2017年2期)2017-03-07
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
小天使·二年级语数英综合(2015年12期)2015-12-04
现代营销·经营版(2015年3期)2015-04-20
测绘学报(2015年4期)2015-01-14