基于卡尔曼滤波遥测系统的高仰角跟踪技术
2018-05-04 03:35:23周爱国
自动化与仪表 2018年4期
王 鑫,周爱国
(中国人民解放军91245部队,葫芦岛 125000)
遥测系统在高仰角跟踪中,很多因素会影响其跟踪性能,比较常见的是正割补偿环节使跟踪的俯仰角度增大,方位跟踪的角速度和角加速度也随之增大,导致跟踪不到目标[1]。在实践中发现,高仰角条件下遥测目标相对天线的角速度还远小于系统伺服的最大速度跟踪指标时,就产生了影响跟踪的较大动态滞后。通过系统伺服数据分析发现,正割补偿带来的噪声影响不但会增大随机误差,还会加大动态滞后误差,由此造成跟踪的瞬时速度和加速度超出指标要求,导致遥测系统伺服无法自动跟踪。
文中提出采用卡尔曼滤波实现单轴跟踪系统的前馈复合控制技术,目的是降低信道及接收机噪声对跟踪环路的影响,在不影响跟踪稳定性的前提下提高系统的无差度,减小滞后误差。在实践中发现,利用该技术还可以滤除高仰角正割补偿增大的噪声影响,降低外界干扰,实现遥测目标的可靠跟踪。
1 正割补偿原理
在图1正割补偿的几何关系中,目标在B点,俯仰角∠BAE=β,方位角∠EAD=α。当目标飞行到C点时,假设此时飞行距离很短,方位角α的变化也很小。在Δt时间运动的角度为Δα,设

对距离和时间取极限

得出

式中:αv为目标在斜平面上的角速度。

图1 正割补偿的几何关系Fig.1 Geometric relationship of secant compensation
由图可见,只要仰角不为零,实际天线方位误差总是大于天馈系统检测出的横向误差。而且,在天线轴线与目标之间横向误差不变的情况下,仰角越高,其误差角越大,当仰角趋向90°时,方位误差角趋于无穷大。同样,要使天线轴线的横向角速度或者角加速度不变,仰角越高,要求方位达到的角速度或角加速度也越大。即

因此,在实际自跟踪系统中,方位支路与俯仰支路相比,多一个正割补偿环节。该环节将横向误差变换成方位误差,然后送伺服驱动[2],如图2所示。

图2 方位支路的正割补偿环节Fig.2 Secant compensation link of azimuth branch
2 正割补偿对高仰角跟踪性能影响的分析
由正割补偿原理可以看出,高仰角跟踪时实际所需的角速度和角加速度远远大于实际检出的角速度。在实际跟踪过程中,方位角的速度和加速度随着俯仰角的增加而增加,因而加大动态滞后。补偿系数见表1。
表1 正割函数Tab.1 Secant function
正割补偿的引入同时造成干扰和跟踪的随机误差的线性增大。理想的馈源以及误差解调、采集电路解出的误差电压和横向误差角呈严格的线性关系,且没有噪声(非热噪声)。由于各种干扰和噪声的存在,实际的理想线性上还要叠加噪声信号。实际噪声与原始噪声的关系为

可见,仰角越高则进入方位伺服控制环路的噪声越大,即伺服系统对误差解调采集通道的噪声更加敏感,从而使跟踪的误差加大。
在某型高弹道遥测目标跟踪中[3],天线俯仰角在70°左右时突然出现强烈抖动,导致信号AGC电压大幅度降低,遥测接收机失锁。俯仰抖动情况如图3所示,AGC电压曲线如图4所示。
图3 俯仰实时角曲线Fig.3 Pitch real time angle curve
图4 遥测信号AGC电压曲线Fig.4 AGC voltage curve of telemetry signal
根据实时伺服曲线图分析,图3中俯仰开始抖动时刻(1027点),对应图4中的AGC电压已经衰落(663点),说明俯仰的抖动原因是遥测目标脱离天线主瓣[4]。检查方位角度曲线在667点—1001点附近方位出现了90°—89°—90°的跳动,造成伺服加速度无法满足跟踪要求从而形成动态滞后,方位上首先脱离天线主瓣。造成角度跳动的原因,是258点—523点方位角误差信号先出现大幅度负压,接着出现180点的正压[5]。由于此阶段信号AGC电压未出现衰落,说明目标是在主波束内,该阶段未出现影响跟踪的动态滞后。时间为180点的方位角误差正压,是导致天线出现回跳的原因[6]。引起方位角误差正压的原因,是258点出现的大幅度方位角误差负压,导致天线突然前冲。在AGC电压值未出现明显下降,目标还在天线主波束范围内,且未与天线零点产生较大的偏移情况下,突然出现的角误差电压是异常的,外界或内部噪声干扰是引起跟踪失败的主要原因[7]。
3 卡尔曼滤波伺服前馈复合控制原理
对于目标沿观察站方位或俯仰轴向x的运动

当其加速度采用非零均值时间相关模型时,其状态方程为


式中:σα为作为机动加速度的“当前”概率分布模型——修正瑞利分布的方差。
跟踪系统中,利用跟踪接收机的角误差信号Δx和天线基座角度传感器信号xA,可以重构指令角信号x。 有

式中:v1主要为接收机输出噪声,也包含角度传感器测量误差、编码误差等[8]。另外,与伺服电机相连的测速机输出y2,可以作为目标在该轴向运动的速度x˙的测量值,有

式中:v2为速度测量误差。 综合式(10)和式(11),得到量测方程为

设r1和r2为零均值白噪声,有
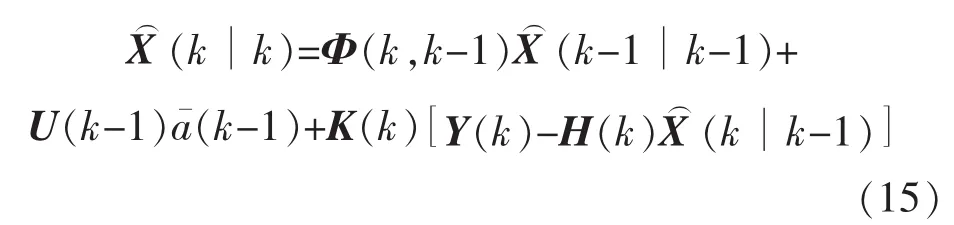
对于状态方程(8)和量测方程(12),可以构造关于状态向量X的卡尔曼滤波估计器为
利用上述关于目标位置、速度、加速度的估计,可以完成跟踪系统的闭环控制和前馈控制,系统组成如图5所示。首先,位置估计((k)与角度传感器信号xA之差送伺服系统构成跟踪闭环,其值为

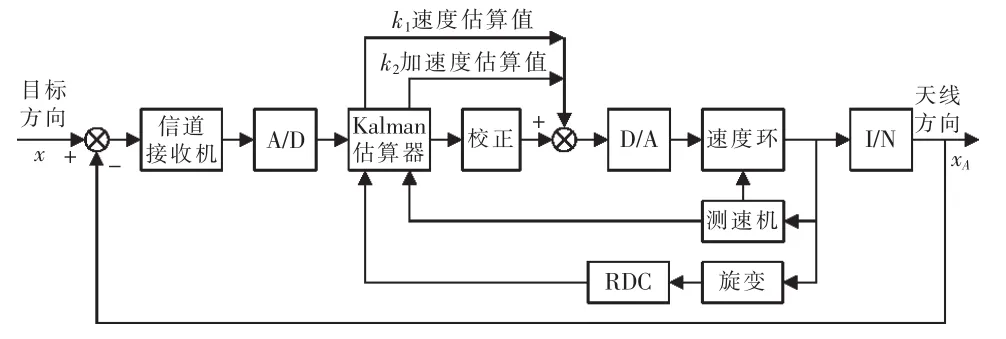
图5 单轴跟踪系统前馈复合控制原理Fig.5 Feedforward control principle of uniaxial tracking system
4 应用结果
在某型遥测装备上完成了所设计系统的安装调试[10]。图6为引入卡尔曼滤波而实现伺服前馈复合控制后,执行某项遥测任务的一系列伺服数据。
由数据结果可以得出,引入用卡尔曼滤波方法实现的前馈复合控制,对于解决高仰角正割补偿放大的噪声对伺服跟踪性能的影响的方法,是非常有效的。
5 结语
在靶场环境中,日益复杂的电磁环境给无线电跟踪带来的干扰问题也越来越多。正割补偿带来的噪声放大效果,是造成装备高仰角跟踪不稳定问题的主要因素。实践表明,在遥测装备伺服跟踪系统中,引入卡尔曼滤波方法所实现的前馈复合控制,对于解决上述问题具有明显的效果,能够保证遥测装备天线在高仰角中实现稳定跟踪。
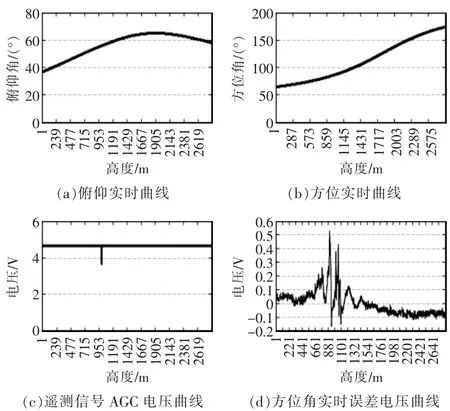
图6 伺服数据Fig.6 Servo data
参考文献:
[1] 薛敦伟.影响天线高仰角跟踪性能的因素分析[J].遥控遥测,1998,19(2):34-40.
[2] 韩恩典,李培,蔡睿,等.高仰角弧段雷达跟踪不稳定因素分析[J].科学技术与工程,2011,11(24):5826-5830.
[3] 李邦复.遥测系统[M].北京:宇航出版社,1992.
[4] 宋洪儒,罗石磊,杨凡.基于PAC的多轴运动控制系统设计[J].重庆理工大学学报:自然科学,2017,31(4):115-120.
[5] 杨文光,张远高,吴红霞,等.稳定跟踪伺服控制系统高俯仰角稳定问题分析[J].火力与指挥控制,2014,39(s1):68-70.
[6] 陈亚军,储岳中,张学锋.基于遗传算法的导弹弹射内弹道参数优化数值仿真[J].重庆理工大学学报:自然科学,2017,31(4):127-133.
[7] 贾渭娟,何斌,郑雪娜.轧机液压伺服系统滑模变结构控制[J].重庆理工大学学报:自然科学,2017,31(4):111-114.
[8] 洪惠宇,陈祝明,高山钦.脉冲多普勒雷达近程高仰角目标的测量[J].解放军理工大学学报,2015,16(3):209-212.
[9] 司文旭,李山,刘述喜.基于数字功率计的变频器测试分析[J].重庆理工大学学报:自然科学,2017,31(2):125-133.
[10]罗续成.用Kalman滤波实现单轴跟踪系统的前馈复合控制[C]//2004年第十三届全国遥测遥控技术年会论文集.北京:中国宇航学会,中国自动化学会,2004:240-249.
猜你喜欢
遥测遥控(2022年1期)2022-02-11 08:01:40
初中生世界·九年级(2020年2期)2020-04-10 06:47:22
电子制作(2019年11期)2019-07-04 00:34:40
电子测试(2018年13期)2018-09-26 03:30:00
科技视界(2016年15期)2016-06-30 12:48:10
现代工业经济和信息化(2016年6期)2016-05-17 05:36:13
电测与仪表(2015年21期)2015-04-09 11:52:14
组合机床与自动化加工技术(2014年10期)2014-03-01 02:22:03
现代防御技术(2014年5期)2014-02-28 18:26:17
河南科技(2014年16期)2014-02-27 14:13:30