基于最短避碰距离和碰撞危险度的避碰决策支持
2018-04-30 05:15刘冬冬史国友李伟峰陈作桓江健
上海海事大学学报 2018年1期
刘冬冬 史国友 李伟峰 陈作桓 江健

摘要:
为解决目前采用船舶领域进行避碰决策时选用的船舶领域多僅适用于一定水域,且选用的船舶领域模型与碰撞危险度模型考虑的因素不一致的问题,提出基于模糊四元船舶领域的碰撞危险度模糊评价模型。为解决采用最短避碰距离作为目标函数进行避碰决策时未考虑航迹偏差以及时间偏差等因素,以及根据所得的避碰参数采取的避碰措施并不能使总航程最短的问题,提出以航迹偏差、时间偏差和总航程作为目标函数的最短避碰路径模型。在综合考虑船舶领域、国际海上避碰规则和负责航行值班的高级船员的主观意识的情况下,应用粒子群优化(particle swarm optimization, PSO)算法规划出最优的避碰路径。MATLAB仿真结果表明,该算法能快速获得最优避碰路径,满足海上航行避碰要求。
关键词:
避碰决策; 避碰路径; 碰撞危险度; 模糊四元船舶领域; 粒子群优化(PSO)
中图分类号: U675.96
文献标志码: A
收稿日期: 2017-05-03
修回日期: 2017-08-16
基金项目:
国家自然科学基金(51579025);辽宁省自然科学基金(20170540090)
作者简介:
刘冬冬(1993—),男,安徽宿州人,硕士研究生,研究方向为船舶智能避碰,(E-mail)liudongdong0509@163.com;
史国友(1969—),男,安徽桐城人,教授,博导,博士,研究方向为船舶智能避碰,(E-mail)993203553@qq.com
Decision support of collision avoidance based on shortest
avoidance distance and collision risk
LIU Dongdong1,2, SHI Guoyou1,2, LI Weifeng1,2, CHEN Zuohuan1,2, JIANG Jian1,2
(1. Navigation College, Dalian Maritime University, Dalian 116026, Liaoning, China;
2. Key Laboratory of Navigation Safety Guarantee of Liaoning Province, Dalian 116026, Liaoning, China)
Abstract:
When ship domain is used to make the decision of collision avoidance, the majority of the chosen ship domain only applies to certain waters, and the considered factors in the chosen ship domain model is inconsistent with those in the chosen collision risk model. To solve the problem, a model of collision risk fuzzy evaluation is proposed based on the fuzzy quaternion ship domain. When the shortest avoidance distance is chosen as the objective function to make decision of collision avoidance, the factors such as the track error and the time deviation are not considered, and the avoidance measures based on the obtained avoidance parameters can not make the overall voyage the shortest. To solve the problem, the shortest avoidance path model is proposed with the track error, the time deviation and the overall voyage as the objective function. With the comprehensive consideration of the ship domain, the international regulations for preventing collisions at sea, and the
subjective consciousness of the officer in charge of a navigational watch, the optimal avoidance path is obtained by the particle swarm optimization (PSO) algorithm. The MATLAB simulation results show that the algorithm can quickly obtain the optimal avoidance path, and meet the demand of collision avoidance for ships at sea.
Key words:
decision-making of collision avoidance; avoidance path; collision risk; fuzzy quaternion ship domain; particle swarm optimization (PSO)
0 引 言
近些年,随着船舶的大型化和高速化,以及船舶数量的增多,海上交通密度日益增大,船舶事故率也逐年升高,其中碰撞事故占比最大。另外,随着智能优化算法的发展,船舶避碰决策的自动化和智能化已成为一个重要的研究方向。近年来,国内外专家学者从船舶领域和碰撞危险度等方面考虑,采用优化算法对避碰决策进行了深入的研究,并取得了一定的成果。然而,在研究船舶避碰决策时,对驾驶员(负责航行值班的高级船员)主观意识下的偏航时间以及环境约束(避碰水域宽度)考虑得不够全面,而且在将船舶领域模型与碰撞危险度模型结合运用时所考虑的因素不一致,在对他船侵入本船领域的状况进行建模时,函数考虑的因素不全面。本文针对以上问题进行研究。
彭理群等[1]在研究汽车路径规划时,同时考虑驾驶意图和动态环境,提高了在动态交通环境下的决策安全性。王涛等[2]在研究静态航线规划时,考虑了航道宽度,使得静态航线的规划不再局限于理论模型。于家根等[3]在船舶转向避碰决策中将碰撞危险度和航程损失作为两个子目标函数,在寻优过程中通过对这两个子目标函数的隶属度进行权值分配形成单目标函数,最后寻求最优解。此方法虽然得到了很好的结果,但仅考虑了避碰角度,未考虑复航时机以及复航角等。马文耀等[4-5]和LI等[6]在采用传统的椭圆船舶领域进行避碰决策时,将避碰过程中前进的距离作为目标函数,通过智能算法进行寻优,最终规划出理论上最安全经济的避碰路径。然而,此目标函数因为缺乏对偏航时间、避碰水域宽度和总航程的考虑,所以在实际应用中,尤其是在狭水道内避碰时,其得到的避碰参数可能会不适合当前的避碰环境。LIU等[7]和TSOU等[8-9]采用空间与时间结合的碰撞危险度模型进行危险度评判,在决策支持阶段同样将避碰过程中前进的距离作为目标函数,通过细菌觅食算法来寻找在最短避碰距离下的决策参数。此方法虽然满足了航海避碰要求,但在碰撞危险度模型中仅考虑了最近会遇距离(distance to closest point of approach, DCPA)和最短会遇时间(time to closest point of approach, TCPA)两个因素,未考虑来船方位、距离和船速比对碰撞危险度的影响。另外,其目标函数同样没有考虑偏航时间、避碰水域宽度和总航程,缺乏主观能动性,并不适合受限水域的避碰决策。GAO等[10]通过改进的遗传算法对岛礁区航路进行了静态规划,其中虽考虑了静态障碍物的安全水域尺度问题,但却缺乏对船舶安全领域的考虑,对于动态避障也缺少进一步的研究。
鉴于前人研究的不足,本文综合考虑来船方位、距离、船速比、DCPA和TCPA,运用四元船舶领域(quaternion ship domain,QSD)对DCPA的隶属度函数进行改进,构建碰撞危险度模糊评价模型。为使避碰决策既考虑人的因素,又同时适用于受限水域和宽阔水域,提出了以偏航时间、避碰水域宽度和总航程为目标函数的最短避碰路径
模型。采用PSO算法,获得最优避碰路径。
1 基于QSD的碰撞危险度模糊评价模型
此模型将QSD加入碰撞危险度模糊评价模型中,对DCPA隶属度函数进行改进,然后结合避碰要素计算模型得出船舶之间的碰撞危险度,为避碰决策提供理论依据。
1.1 避碰要素计算模型
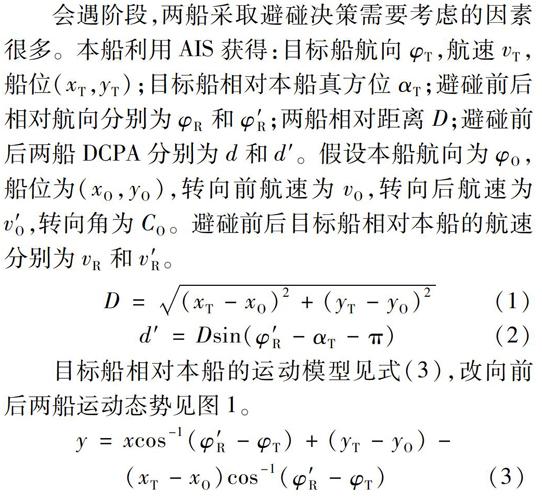
会遇阶段,两船采取避碰决策需要考虑的因素很多。本船利用AIS获得:目标船航向φT,航速vT,船位(xT,yT);目标船相对本船真方位αT;避碰前后相对航向分别为φR和φ′R;两船相对距离D;避碰前后两船DCPA分别为d和d′。假设本船航向为φO,船位为(xO,yO),转向前航速为vO,转向后航速为v′O,转向角为CO。避碰前后目标船相对本船的航速分别为vR和v′R。
D=(xT-xO)2+(yT-yO)2(1)
d′=Dsin(φ′R-αT-π)(2)
目标船相对本船的运动模型见式(3),改向前后两船运动态势见图1。
y=xcos-1(φ′R-φT)+(yT-yO)-
(xT-xO)cos-1(φ′R-φT)
(3)
图1 转向避碰
1.2 模糊QSD模型
以往船舶碰撞危险度研究多采用建立在单一水域的椭圆形或圆形船舶领域,仅适用于特定水域,在使用基于这些船舶领域的碰撞危险度模糊评价模型判定船舶危险度时存在一定的误差。针对以上问题,采用统一的船舶领域框架[11]——QSD模型(见式(4),它不仅适用于多船避碰,还可以通过调节参数k使之适用于不同水域,为研究方便,假设k=2)进行危险度研究。式(4)中,Q由4个方向的半径决定,其中Rfore,Raft,Rstarb和Rport分别为QSD的纵向前半徑、纵向后半径、横向左半径和横向右半径,sgn(x)和sgn(y)分别为x和y的符号判定函数。
fk(x,y,Q)=
2x(1+sgn(x))Rfore-(1-sgn(x))Raftk+
2y(1+sgn(y))Rstarb-(1-sgn(y))Rportk(4)
Q={Rfore,Raft,Rstarb,Rport}
sgn(x)=
-1,x<0
1,x≥0
sgn(y)=
-1,y<0
1,y≥0
基于QSD模型得到的最低安全会遇距离d1(在该区域内,拒绝他船侵入,危险度为1,此处d1取船舶领域边界)和船舶安全通过距离d2(根据经验,在d≥2d1时,船舶不采取避碰行动,即危险度为0[12])的计算式分别见式(5)和(6),其中B为船舶领域上的方位角,示意图见图2。
d1=
(Rstarbcos B)2+(Rforesin B)2, 0°≤B≤90°
(Rstarbcos B)2+(Raftsin B)2, 90°<B≤180°
(Rportcos B)2+(Raftsin B)2, 180°<B≤270°
(Rportcos B)2+(Rforesin B)2, 270°<B≤360°
(5)
d2=2d1(6)
1.3 改进的碰撞危险度模糊评价模型
在船舶会遇过程中,对目标船的评价有危险目标和安全目标,但却没有严格的界定,因此利用模糊数学的原理来度量危险度。然而,现有的碰撞危险度模糊评价模型在对d的隶属度进行计算时,
未考虑在d>d1时可能会出现侵入船舶领域的现象(见图2)。
图2 会遇船舶相对运动及危险度示意图
现有的碰撞危险度模糊评价方法[13]以影响船舶碰撞危险度的DCPA,TCPA,来船方位,距离和船速比作为基本评判参数。假设有n≥1艘目标船与本船相遇,ui1,ui2,ui3,ui4和ui5分别为目标船i的上述各参数隶属度且均属于[0,1],i=1,2,…,n;a1,a2,a3,a4和a5依次为各参数隶属度权值(均大于0且之和为1)。目标船i与本船的碰撞危险度为
fi=5j=1(ajuij)(7)
其中ui1受到d1的影响。对此,在综合考虑图2中侵入船舶领域的现象和各影响因素的同时,针对目前普遍采用的碰撞危险度模糊评价模型中ui1计算过程中存在的不足,在文献[13]的基础上,基于QSD模型得到d1,通过判断目标船相对运动线是否穿越本船的船舶领域(即通过比较d′与d的大小来判断,使之在根据危险度计算避碰角度时得到的结果更准确,从而保证在根据结果采取措施后不会发生侵入现象)对算法进行改进:
ui1=
1, d′<d1
0.5-0.5sin180°d2-d1d-d2+d12,
d1<d′<d2
0, d′>d2 (8)
d′=d/cos θ, θ∈[-90°,90°](9)
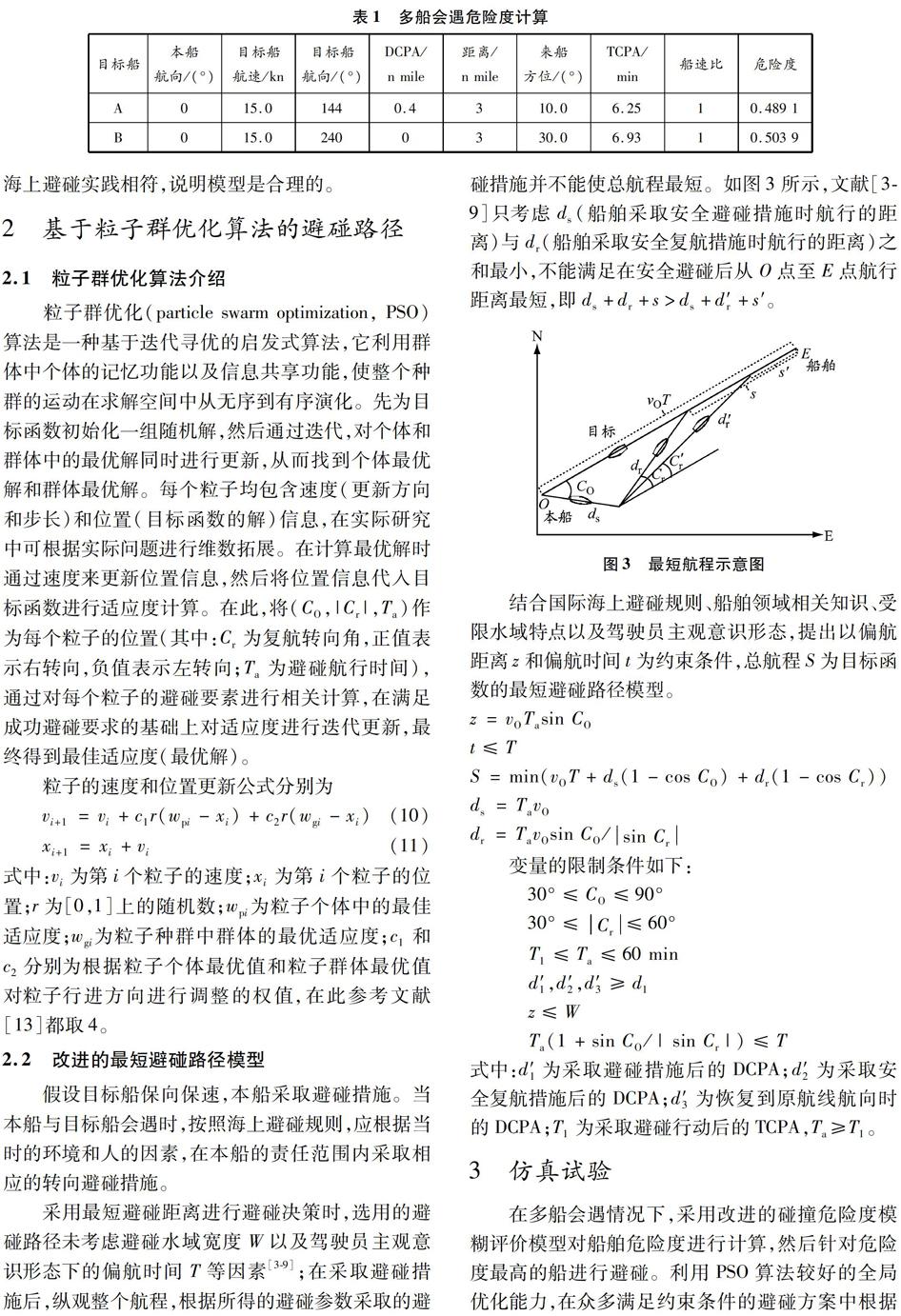
假设本船航行在某一海域,同时与船A和船B会遇,具体会遇信息见表1。根据改进的碰撞危险度模糊评价模型,可得到两船危险度。根据大量统计研究[15],a1,a2,a3,a4,a5分别取0.36,0.32,0.14,0.10,0.08。由表1结果可知,船B较危险,与
表1 多船会遇危险度计算
海上避碰實践相符,说明模型是合理的。
2 基于粒子群优化算法的避碰路径
2.1 粒子群优化算法介绍
粒子群优化(particle swarm optimization, PSO)算法是一种基于迭代寻优的启发式算法,它利用群体中个体的记忆功能以及信息共享功能,使整个种群的运动在求解空间中从无序到有序演化。先为目标函数初始化一组随机解,然后通过迭代,对个体和群体中的最优解同时进行更新,从而找到个体最优解和群体最优解。每个粒子均包含速度(更新方向和步长)和位置
(目标函数的解)信息,在实际研究中可根据实际问题进行维数拓展。在计算最优解时通过速度来更新位置信息,然后将位置信息代入目标函数进行适应度计算。在此,将
(CO,|Cr|,Ta)作为每个粒子的位置(其中:Cr为复航转向角,正值表示右转向,负值表示左转向;Ta为避碰航行时间),通过对每个粒子的避碰要素进行相关计算,在满足成功避碰要求的基础上对适应度进行迭代更新,最终得到最佳适应度(最优解)。
粒子的速度和位置更新公式分别为
vi+1=vi+c1r(wpi-xi)+c2r(wgi-xi)(10)
xi+1=xi+vi(11)
式中:vi为第i个粒子的速度;xi为第i个粒子的位置;r为[0,1]上的随机数;wpi为粒子个体中的最佳适应度;wgi为粒子种群中群体的最优适应度;c1和c2分别为根据粒子个体最优值和粒子群体最优值对粒子行进方向进行调整的权值,在此参考文献[13]都取4。
2.2 改进的最短避碰路径模型
假设目标船保向保速,本船采取避碰措施。当本船与目标船会遇时,按照海上避碰规则,应根据当时的环境和人的因素,在本船的责任范围内采取相应的转向避碰措施。
采用最短避碰距离进行避碰决策时,选用的避碰路径未考虑避碰水域宽度W以及驾驶员主观意识形态下的偏航时间T等因素[3-9];在采取避碰措施后,纵观整个航程,根据所得的避碰参数采取的避碰措施并不能使总航程最短。如图3所示,文献[3-9]只考虑ds(船舶采取安全避碰措施时航行的距离)与dr(船舶采取安全复航措施时航行的距离)之和最小,不能满足在安全避碰后从O点至E点航行距离最短,即ds+dr+s>ds+d′r+s′。
图3 最短航程示意图
结合国际海上避碰规则、船舶领域相关知识、受限水域特点以及驾驶员主观意识形态,提出以偏航
距离z和偏航时间t为约束条件,总航程S为目标函数的最短避碰路径模型。
z=vOTasin CO
t≤T
S=min(vOT+ds(1-cos CO)+dr(1-cos Cr))
ds=TavO
dr=TavOsin CO/
sin Cr
变量的限制条件如下:
30°≤CO≤90°
30°≤Cr≤60°
T1≤Ta≤60 min
d′1,d′2,d′3≥d1
z≤W
Ta(1+sin CO/|sin Cr|)≤T
式中:d′1为采取避碰措施后的DCPA;d′2为采取安全复航措施后的DCPA;d′3为恢复到原航线航向时的DCPA;T1为采取避碰行动后的TCPA,Ta≥T1。
3 仿真试验
在多船会遇情况下,采用改进的碰撞危险度模糊评价模型对船舶危险度进行计算,然后针对危险度最高的船进行避碰。利用PSO算法较好的全局优化能力,在众多满足约束条件的避碰方案中根据目标函数(最短航程)选出最佳方案。假定粒子个数为20,系统随机初始化20组位置(CO,|Cr|,Ta)和速度数据,然后根据图4所示的流程进行迭代寻优,即可获得最短规划路径。
图4 算法流程
本船初始运动参数vO=7 kn,φO=0°,经纬度坐标(35.5°N,123.5°E);目标船vT=7 kn;驾驶员主观意识形态下T=1 h;以受限水域宁波佛渡水道(宽2 n mile)为例,W取其宽度的一半,为1 n mile。
目标船在φT=180°和经纬度坐标为(35.56°N,123.50°E)时,与本船形成对遇局面,本船避碰过程见图5。
图5 对遇局面下的避碰过程
目标船在φT=240°和经纬度坐标为(35.54°N,123.54°E)时,与本船形成交叉局面,本船避碰过程见图6。
图6 交叉局面下的避碰过程
目标船在φT=292°和经纬度坐标为(35.53°N,123.51°E)时,与本船形成大角度交叉局面,本船避碰过程见图7。
图7 大角度交叉局面下的避碰过程
通过对对遇局面、交叉局面、大角度交叉局面进行仿真,得到表2数据。表2中:CO在30°与90°之间,在实际操作中转向角应不小于表中数据,否则会导致本船侵入目标船船舶领域;Cr绝对值在30°与60°之间,在实际操作中复航角应不大于表中数据,否则会导致本船侵入目标船船舶领域;为确保航行安全,实际操作中Ta应不小于表中数据。
表2 基于PSO算法的优化路径参数
经过与现有模型的对比发现,基于本文模型得到的最短航程明显小于原有模型。在需要频繁避碰时,此模型显然可以节省较长航时,达到经济航行的目的,而且其计算复杂度较低,计算所需时间仅3~4 s,相比于基于细菌觅食算法(耗时15~20 s)的模型其效率更高。对于在多船会遇情况下的大量数据的处理,此方法的效率将更高,更能够满足航海避碰决策的要求。
4 结束语
基于四元船舶领域模型、最适会遇距离(DCPA)、最短会遇时间(TCPA)、来船方位、距离和船速比的船舶碰撞危险度模糊评价模型可以确保与避碰决策阶段的船舶领域模型考虑的因素一致,保证危险度判别的准确性以及决策的安全性。改进的最短避碰路径模型充分考虑到避碰水域宽度、偏航时间和总航程对避碰决策的影响,不仅可以适用于宽阔水域同样也可以适用于受限水域。将此方法与ECDIS相结合,可使海上船舶避碰决策变得更加直观且准确,有效减轻驾驶员负担,增强航行安全。后续研究速度避碰模型,使避碰决策模型更加符合受限水域的航行要求。
参考文献:
[1]彭理群, 吴超仲, 黄珍, 等. 考虑驾驶意图与动态环境的汽车避碰路径规划[J]. 交通运输系统工程与信息, 2016, 16(6): 81-87. DOI: 10.3969/j.issn.1009-6744.2016.06.013.
[2]王濤, 张立华, 彭认灿, 等.顾及航道宽度的最短距离航线自动生成方法[J]. 海洋测绘, 2016, 36(3): 29-31. DOI: 10.3969/j.issn.1671-3044.2016.03.007.
[3]于家根, 刘正江, 卜仁祥, 等. 基于拟态物理学优化算法的船舶转向避碰决策[J]. 中国航海, 2016, 39(1): 36-39. DOI: 10.3969/j.issn.1000-4653.2016.01.009.
[4]马文耀, 杨家轩. 基于细菌觅食算法的避碰航路优化研究[J]. 大连海事大学学报, 2013, 39(2): 22-25. DOI: 10.3969/j.issn.1006-7736.2013.02.006.
[5]马文耀, 吴兆麟, 杨家轩, 等. 人工鱼群算法的避碰路径规划决策支持[J]. 中国航海, 2014, 37(3): 63-67. DOI: 10.3969/j.issn.1000-4653.2014.03.015.
[6]LI Weifeng, MA Wenyao. Simulation on vessel intelligent collision avoidance based on artificial fish swarm algorithm[J]. Polish Maritime Research, 2016(23): 138-143. DOI: 10.1515/pomr-2016-0058.
[7]LIU Hongdan, ZHANG Lanyong, LIU Sheng, et al. The application research foraging intelligent algorithm in ship collision avoidance[C]//International Conference on Mechatronics, Control and Electronic Engineering. Atlantis Press, 2014: 69-73.
[8]TSOU Ming-Cheng. Multi-target collision avoidance route planning under an ECDIS framework[J]. Ocean Engineering, 2016, 121: 268-278. DOI: 10.1016/j.oceaneng.2016.05.040.
[9]TSOU Ming-Cheng, KAO Sheng-Long, SU Chien-Min. Decision support from genetic algorithms for ship collision avoidance route planning and alerts[J]. Journal of Navigation, 2010, 63: 167-182. DOI: 10.1017/S037346330999021X.
[10]GAO Miao, SHI Guoyou, LI Weifeng, et al. An improved genetic algorithm for island route planning[C]//13th Global Congress on Manufacturing and Management (GCMM 2016). Procedia Engineering, 2017, 174: 433-441.
[11]王宁, 刘刚健, 董诺, 等. 一种模糊四元船舶安全领域模型及船舶避碰方法: 103204223[P]. 2013-07-17.
[12]贾立校. 船舶碰撞危险度模型应用与验证[J]. 舰船科学技术, 2016, 38(5A): 16-18. DOI: 10.3404/j.issn.1672-7649.2016.5A.006.
[13]章泽虎. 基于模糊综合评判的船舶碰撞危险度模型研究[D]. 大连: 大连海事大学, 2012.
猜你喜欢
科学与财富(2021年35期)2021-05-10
疯狂英语·爱英语(2020年12期)2020-12-29
中国食品(2020年14期)2020-10-20
青少年科技博览(中学版)(2019年2期)2019-06-20
智富时代(2019年3期)2019-04-30
智富时代(2019年3期)2019-04-30
决策(2018年8期)2018-12-10
小天使·四年级语数英综合(2018年1期)2018-07-04
伙伴(2018年1期)2018-05-14
南方文学(2016年3期)2016-06-12