基于K60单片机的电磁循迹双车联动系统
2018-04-26 08:51江南大学物联网工程学院杨子鹏徐颖秦
电子世界 2018年7期
江南大学物联网工程学院 杨子鹏 王 威 徐颖秦
1.引言
近年来,智能制造浪潮席卷全球,现代工厂对自动化、智能化的要求越来越高。借助电磁自动引导装置,在规定的路径上实现自主行驶的无人运输车在智能工厂中具有极高的应用价值。电磁循迹双车联动系统借助电磁传感器形成转向闭环,可以使无人车沿着电磁线进行自主行驶;借助编码器对车速进行速度反馈形成电机转速闭环,可以使无人车按照预定速度行驶;借助鸳鸯超声波可以形成车距闭环,使后车以恒定车距跟随前车,形成双车联动。该系统采用的电磁循迹模式相比摄像头、光电等光学循迹,不受光照等外界因素影响,可靠性强,且轨道铺设的经济成本低[1],在智能工厂等领域具有一定的应用价值和发展前景。
2.硬件组成及设计原理
基于K60单片机的电磁循迹双车联动系统硬件组成原理如图1所示。系统以K60单片机为控制器,以电磁传感器、编码器、鸳鸯超声波为测量变送器,以舵机、电机为执行器,形成一套完整的运动控制系统。该系统同时配有按键与OLED显示屏,实现车速设定、PID参数调节等功能。
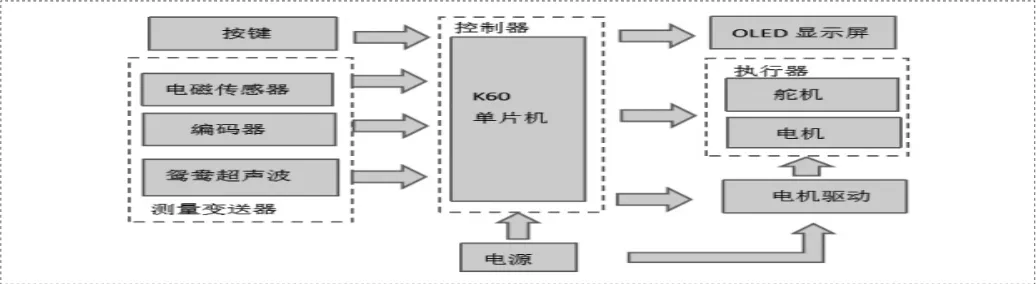
图1 系统组成原理图

图2 LM2940稳压电路
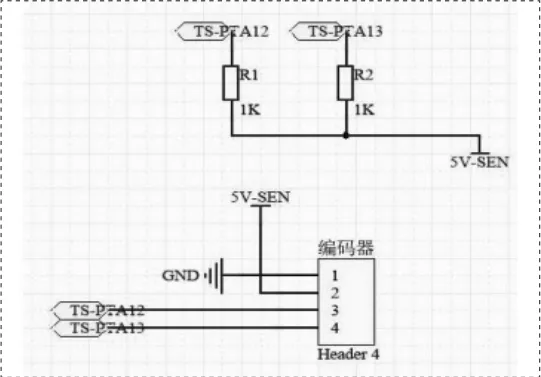
图3 编码器电路
2.1 单片机主控制器
本设计选用飞思卡尔K60型单片机[2],该单片机采用Cortex M4内核,是一款低功耗高性能的MCU,其内部有快速高精度16位ADC,满足系统功能实现要求。 主控电路由K60最小系统板为主进行拓展,设置鸳鸯超声波、编码器、电磁传感器、舵机、电机、OLED显示屏等接口方便接线。整个系统采用7.2V电源进行供电,由于系统各模块所需电压为5V,因此搭载LM2940稳压电路将7.2V电压转换成5V,如图2所示。编码器属于漏极开路输出,需要增加上拉电阻,如图3所示。同时主控电路预留备用接口,方便拓展。
2.2 电机驱动电路
电机驱动采用两个IR2104s半桥驱动器搭建全桥电路[3],如图4所示。IR2104s的VCC端需要接12V电源,采用图5所示的LM2577升压电路将5V升高为12V供其使用。为保障单片机的安全,采用74lvc245芯片将其与电机驱动隔离,如图6所示。电机驱动有有两个控制管脚,通过单片机控制,对IN1管脚输入PWM波,IN2管脚输入低电平时,可使电机正向转动,同时实现无级调速;对IN2管脚输入PWM波,IN1管脚输入低电平时,可以实现电机反转功能。
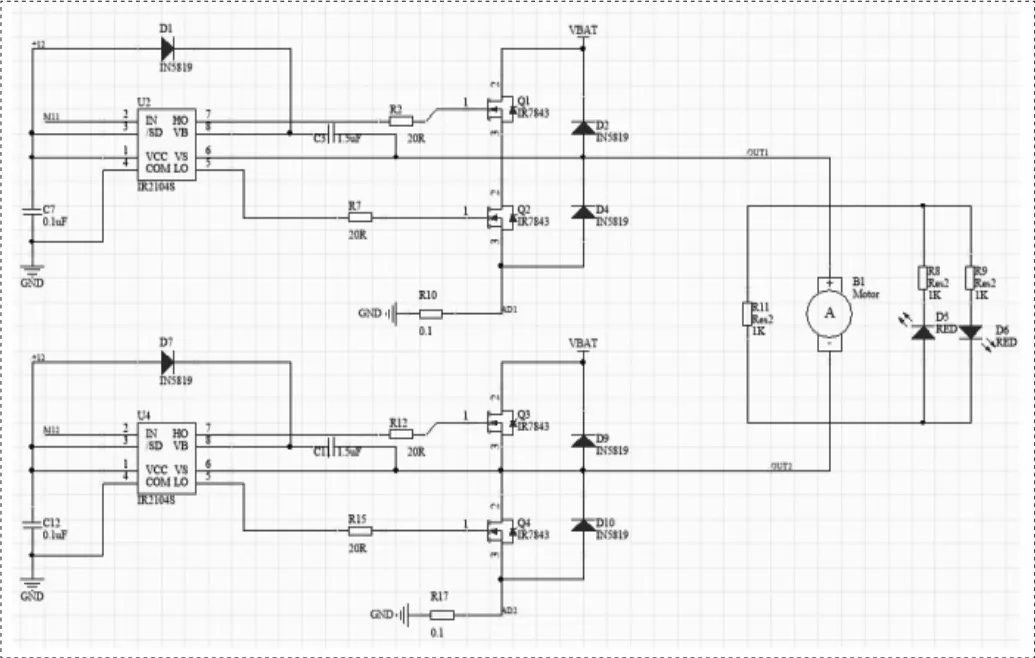
图4 电机驱动全桥电路

图5 LM2577升压电路
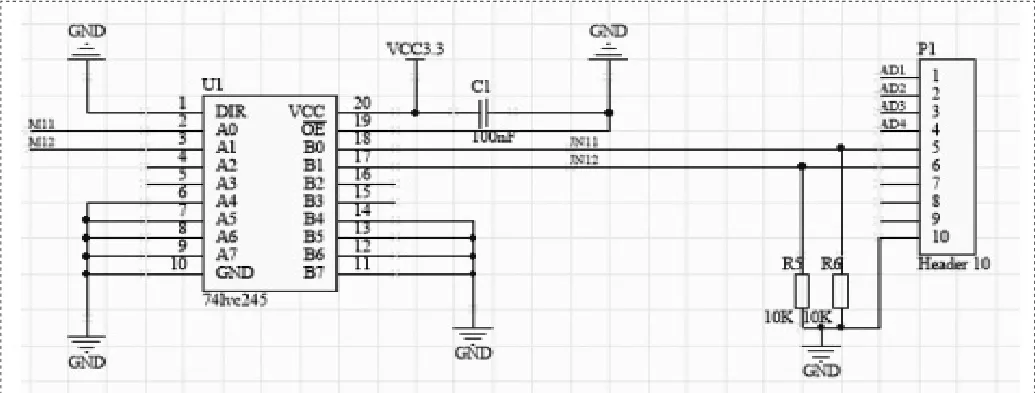
图6 74lvc245隔离电路
2.3 电磁传感器电路
根据麦克斯韦电磁场理论,交变电流会在周围产生交变电磁场,通过检测相应电磁场的强度和方向可以反过来获得距离导线的空间位置。电磁引导线中通以20kHz的交变电流作为引导信号,可以有效避开环境中其他磁场干扰。采用LC串并联电路对电磁信号进行选频放大,电感选用330uH,电容选用100pF。电磁信号放大器如图7所示。电磁传感器上对称分布4个电磁信号放大器,传感器通过检测智能车所处位置电磁场的强度和方向,再经AD转换即可获得它所处的空间位置,进而实现对智能车方向控制。
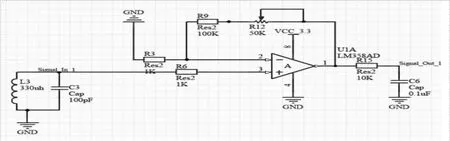
图7 电磁信号放大电路
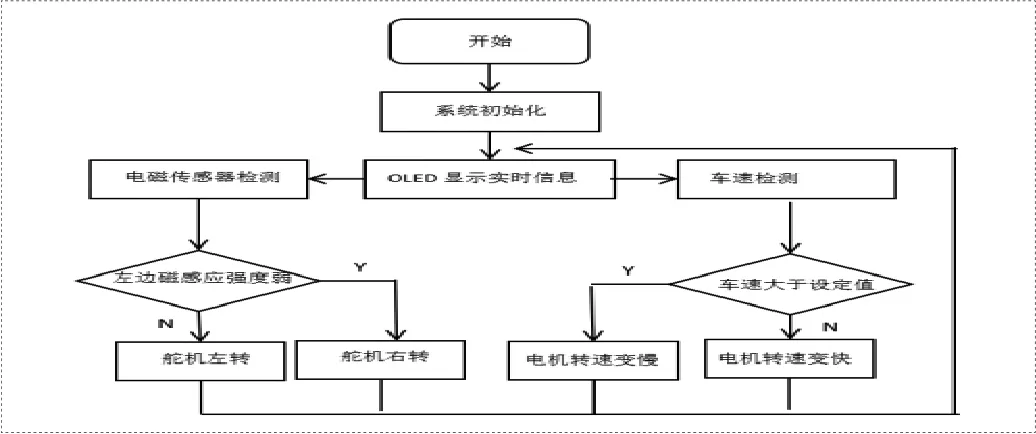
图8 前车主程序流程图
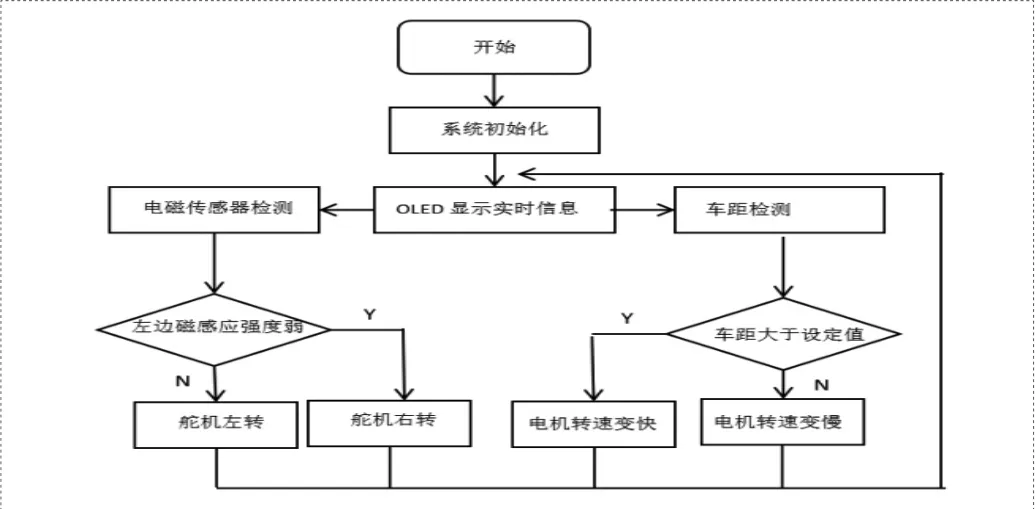
图9 后车主程序流程图
3.系统软件控制算法设计
系统采用三个闭环进行控制,分别是转向闭环、车速闭环、车距闭环。舵机转向需要快速响应,因此采用PD算法进行控制[4];车距控制要求精度高,采用PI算法进行控制;车速控制希望性能更优,因此采用PID算法进行控制。主程序流程图如图8和图9所示。
4.结论
本设计以K60单片机为控制核心,通过编码器对车速进行检测,电磁传感器对车空间位置进行检测,鸳鸯超声波对车距进行检测,将检测结果送入AD转换器转换成数字信号后传送给K60单片机,对采集到的数据采用PID控制策略,单片机输出相应的控制信号,实现对智能车速度、车距以及空间位置的控制。该系统对环境的适应性强,对智能车的控制精度高,能够很好的实现对智能车速度、车距以及空间位置的控制,而且轨道铺设成本低,经济性好,在现代化工厂中有一定的应用价值。
[1]杨建姣,朱凤武,齐迹.基于K60电磁循迹智能车系统控制策略的设计[J].安徽电子信息职业技术学院学报,2016,15(2)∶9-13.
[2]隋金雪,杨莉,张岩.飞思卡尔”杯智能汽车设计与实例教程[M].电子工业出版社,2014.
[3]闫琪.智能车设计[M].北京航空航天大学出版社,2014.
[4]黎婷婷,叶梦君,乔德文,龙涛.基于电磁技术的智能车系统的软件设计[J].智慧工厂,2016(03)∶95-99.
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28
汽车实用技术(2022年4期)2022-03-07
电子测试(2018年15期)2018-09-26
莫愁·时代人物(2018年7期)2018-09-12
成都信息工程大学学报(2018年3期)2018-08-29
莫愁(2018年20期)2018-07-19
电子制作(2017年1期)2017-05-17
电子制作(2016年11期)2016-11-07
电子器件(2015年5期)2015-12-29
汽车技术(2014年8期)2014-07-18