
基于相对位置不变性的接触网鸟巢识别检测
2018-04-26 03:44:53祝振敏谢亮凯
铁道科学与工程学报 2018年4期
祝振敏,谢亮凯
(华东交通大学 电气与自动化工程学院,江西 南昌 330013)
随着电气化铁路的高速发展,运营里程日渐增加,由鸟类活动引起的接触网安全事故也相应增加,由鸟类活动导致的线路故障仅次于雷击、外力破坏[1],已严重威胁到铁路运输的安全运行,因此,有必要对铁路上的鸟巢进行清理。目前,铁路局对鸟窝的检测主要通过人工分析视频图像,做出判断并标记。这种人工检测方式耗费的时间和占用的内存都是巨大的,效率较低,且不能及时地发现问题。因此有必要研究自动识别检测技术。近年来,非接触式图像检测技术广泛用于弓网参数检测、接触网零部件的识别检测。石轶等[2]基于双目视觉测量原理,设计了一种快速、高精度的测量接触网几何参数的系统。段汝娇等[3]基于机器视觉提出一种接触网定位器倾斜角度自动测量的方法。韩炜等[4]针对铁路接触网中支柱上的旋转双耳的耳片的裂缝问题,利用尺度不变特征变换,与标准的图像进行特征点匹配,实现了旋转双耳的定位与检测。郭晓旭等[5]用Harris对图像进行角点检测,再对图像差分实现了绝缘子的故障判断,抗旋转性能好。本文主要对接触网C2装置采集的大量存在鸟窝的图像进行分析,利用机器视觉处理技术,在初步分析图像的颜色特征、纹理特征、形状特征、边缘轮廓之后,结合鸟窝筑巢平台的特征,提出一种基于鸟窝和硬横梁相对位置的检测方法。将预处理后的检测图像利用 sobel水平边缘检测算子得到图像边缘,然后再利用概率 Hough变换直线检测方法对图像进行角度校正,并结合待分析图像中线段长度关系实现最前景硬横梁的检测,最后对图像进行otsu二值化处理,通过统计硬横梁之间的白色区域面积,判断该横梁上是否存在鸟窝。
1 鸟巢图像特点分析
研究表明,鸟类选择筑巢的平台特点趋向于地势较高,视野开阔,利于自身的生存和安全[6],而接触网中的杆塔就正好符合鸟类筑巢的条件,且杆塔的中上部是筑巢的最佳位置。
C2装置是一种便携式视频采集设备,它通过对接触网的状态及外部环境进行视频采集,分析接触网技术状态,指导接触网的运行和维修。它架设于运营的动车组(或机车)司机室内[7]。
图1所示为C2装置采集到的接触网图像,对车载视频中接触网零部件的分析、检测是针对每一帧图像中处于最前景的1-2根支柱,由于相机是安装在列车驾驶室内,会以一定的仰角来采集接触网装置图像,这就使得图像中鸟巢所在处的背景绝大多数为天空,这一特性为鸟巢的识别提供了有利条件。

图1 接触网图像Fig. 1 Catenary image
2 Sobel算子边缘检测
Sobel算子根据像素点上下、左右邻点灰度加权差,在边缘处达到极值这一现象检测边缘,其运行速度较快,对噪声具有平滑作用,去掉部分伪边缘,并可提供最精确的边缘方向估计[8]。

图2 Canny边缘检测Fig. 2 Canny edge detection
在对复杂的接触网图像边缘提取的算法中,Canny算子对图像边缘的提取效果要优于Sobel算子,能够很好的检测到图像边缘,保留比较完整的边缘细节信息,如图2所示。本实验中只要求检测到最前景的硬横梁结构的边缘,过多的细节信息反而会对后期的线段检测造成干扰,Sobel算子计算复杂度相对较低,还能在计算速度方面有所提高,为实时检测创造了条件;同时,Sobel还能通过不同方向的检测算子得到不同方向的边缘信息,为后期的硬横梁的单独检测打下了良好的基础,Sobel水平边缘处理效果见图 3。所以,为了滤除掉竖直方向可能存在的线段,本文采用Sobel水平边缘检测算子。

图3 Sobel水平边缘检测Fig. 3 Sobel horizontal edge detection
3 概率Hough变换理论
标准的 Hough变换算法就是利用图像空间的点与Hough参数空间的线的对偶关系,将图像空间中的像元,按照一定的变换规则转化到参数空间中,然后把在参数空间中获得的相同数组进行累加统计,并根据最终得到的累加器极值,以此实现对直线的检测,使直线的提取问题转化为计数问题。
标准的Hough变换在计算时,要求对图像中的所有点都要进行变换,变换过程花费时间较长,且占用计算机内存较大。
而且,在具有复杂背景信息的接触网图像中,即使前面采用了Sobel算子进行边缘了检测,过滤掉了大部分细节信息,但是剩余的边缘点的数量仍然非常多,若对所有边缘点进行变换,将占用巨大内存和消耗大量时间。
为了克服上述缺陷,本文采用由 Kiryati等[9]提出的概率Hough变换,由于它是随机的选择一组点来进行变换,替代了原来的对所有点变换,在保证Hough变换的优点的同时,节省了运算时间。
其算法理论如下:在参数空间中,每一个点都对应于原图像中的多个特征点。从原图中任意取一对特征点(pi, pj),其中,pi=(xi, yi),pj=(xj, yj),则由式(1)就可得到参数中的点(a, b)。

当对其他点变换得到相同计算结果时,数组H(a, b)就会不断的积累,当该数组积累的数值率先超过规定的一个最大值时,这时的 H(a, b)数组就表示了要检测的直线。
本文采用概率Hough变换,减少了算法的计算时间,并返回线段端点坐标,通过端点坐标可计算出直线的倾斜角及线段的长度。
若已知检测得某线段的两端点坐标,分别设为(x1, y1),(x2, y2),则能计算出该线段的倾斜角及线段长度。
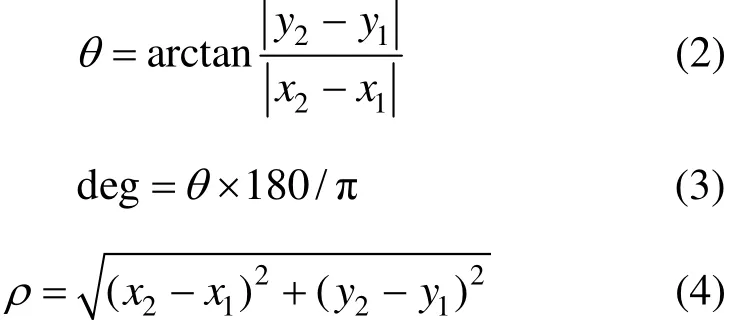
式中:θ为线段倾斜角度的弧度制,将其转换为角度deg,ρ为线段的长度。通过概率Hough直线检测算法,检测出图像中所有的直线段,并分别求出角度和长度。
4 Otsu算法
Otsu 算法即最大类间方差法,算法的基本思想就是寻求一个合适的阈值将图像划分为前景像素和背景像素2个不同的类别,并使得这个类别的类间方差最大。类间方差度量了2个类别的差异,要使得所求的图像的前景和背景相差越明显,此时得到的类间方差越大。
文献[10]采用错分概率、形状和均匀性度量作为标准,对多个基于全局阈值的分割算法进行了对比,实验结果表明,Otsu是一种效果不错的分割方法。
5 鸟巢识别与定位实验
本文采取的方法的思路示意图如图4所示,再通过对实际采集的接触网图像进行实验,验证方法的有效性。
5.1 鸟窝图像预处理
经过对大量接触网中鸟窝图像的分析,鸟窝的颜色特征并不突出,因此考虑将原始RGB图像转换为灰度图像,去除冗余的颜色信息,提高图像处理速度。再用sobel水平边缘检测算子,滤除掉竖直方向可能存在的线段,得到图像边缘,如图3所示。
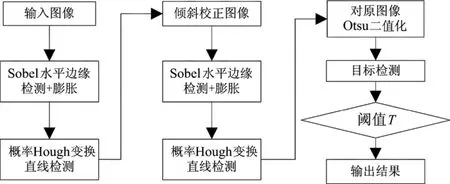
图4 本文方法思路示意图Fig. 4 Diagram of the method proposed in this paper
5.2 图像角度校正
由图3可见,经过sobel水平边缘算子检测后的图像,物体边缘及内部都存在空洞,连续性不足,采用膨胀操作能增加图像中对象的边界像素,为后续的直线检测创造了良好的条件。再对膨胀后图像进行概率Hough直线检测,并计算所有检测到的直线角度及长度,根据最前景横梁长度远大于靠后的横梁这一特性,能够实现对最前景的硬横梁的定位,如图5所示,再对图像进行角度校正,使硬横梁完全与水平方向平行,为后续滑动窗口的检测提供条件,校正后图像如图6所示。
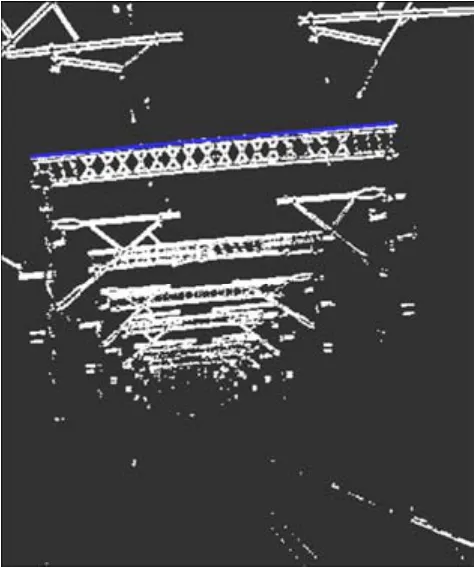
图5 直线检测图像Fig. 5 Line detection

图6 旋转后图像Fig. 6 Rotated image
5.3 像素点统计
将原图像用 Otsu算法二值化处理后并用相同角度校正,此时,硬横梁与水平方向平行,利于滑动矩形框对横梁之间的像素点进行统计。
5.4 鸟巢定位判断
根据检测到的上下横梁(如图7),以它们的之间高度差为边长,产生矩形滑动窗口,以1/4边长为滑动步长,横梁的左、右侧分别为滑动窗口的起始、终点位置,对矩形框内的白色像素值进行统计,如图8和图9所示,图8为有鸟窝图像处理后的结果,图9为无鸟窝图像处理后的结果,由两图对比可看出,当硬横梁中存在鸟窝时,在鸟窝位置处,白色区域面积异常偏大,如图8中最前景硬横梁的左下角处。因此,设定一阈值 T,T表示矩形窗口内的白色像素值的和与矩形窗口面积的比值。
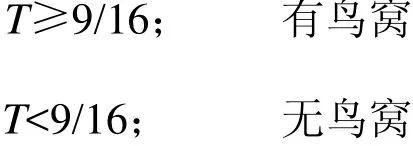

图7 上下横梁Fig. 7 Upper beam and the lower beam

图9 无鸟窝图像处理后结果Fig. 9 Result of the image without a nest
阈值T的取值依据是在试验前对大量的硬横梁中存在鸟窝的图像和正常的图像进行试验统计得出。
试验前选取100张图像进行测试统计,其中70张为横梁上有鸟窝,30张为不含鸟窝图像,图像均取自于南昌铁路局供电段。由于在正常图像中,硬横梁部分差别不大,所以在选取的数量上更倾向于硬横梁中存在鸟窝的情况。统计结果如表1所示。

表1 测试图像统计结果Table 1 Statistical results of test images
从统计结果中可以得出,当有明显的鸟窝出现时,矩形框内白色像素值约占整个矩形面积的9/16到 10/16,甚至更高,而在正常图像中由于硬横梁之间还存在一定的钢结构,这也是白色区域的一部分,所以该比值在7/16左右,低于9/16。所以试验中设定阈值 9/16作为分界值判断图像中硬横梁上是否存在鸟窝。检测结果如图10所示。
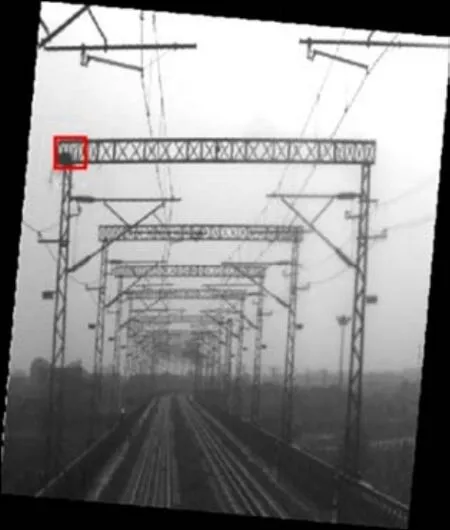
图10 检测结果Fig. 10 Detection result
6 试验结果及分析
另取50张作为测试图像,35张为横梁上有鸟窝,15张为不含鸟窝。以Matlab R2014a和opencv开源库为仿真程序设计开发平台,对图像进行测试,相关测试图像检测结果如图11和图12所示,并得出最终的仿真结果,如表2所示。结果中出现漏检的原因是因为鸟窝太小,并不明显,以至于即使人工检测也需要将图片放大数倍,最终误判为无鸟窝。在实际工程应用中,当检测出故障后,均需要通过人工确认后才能向工区下达任务,因此也可适当调整阈值,减小漏检率,过度检测不会造成大的影响。
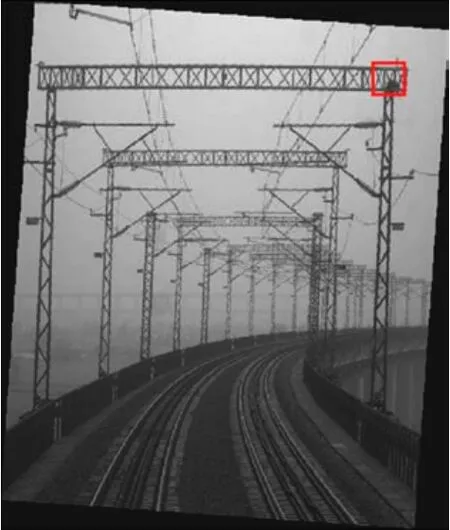
图11 相关测试图像1检测结果Fig. 11 Result of related test image 1

图12 相关测试图像2检测结果Fig. 12 Result of related test image 2
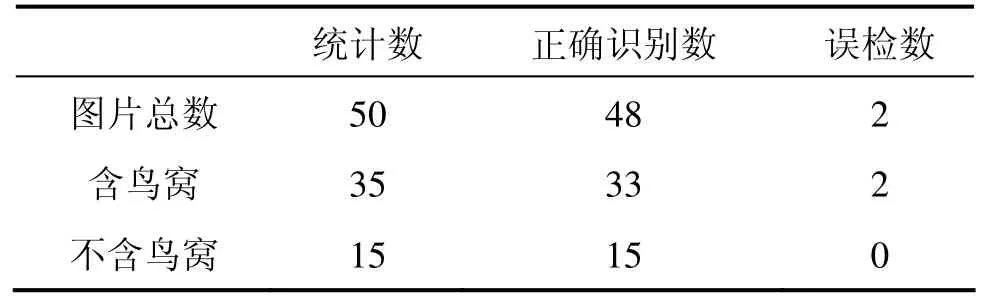
表2 该方案的检测结果Table2 Detection results of the scheme
试验结果表明:本算法能克服光照和铁路沿线上其他树枝的影响,通过相对位置来实施对鸟窝的检测,减少了搜索区域,提高了检测效率,能准确地检测出鸟窝所在位置。
7 结论
1) Sobel水平算子滤除掉了竖直方向可能存在的线段,为硬横梁的检测创造了良好的条件。
2) 采用概率 Hough变换检测直线,在保证了标准Hough变换优秀检测效果的同时,降低了空间消耗,减少了计算时间,为实时检测创造了条件。
3) 对Otsu二值化后的图像进行检测,为算法的实时性提供了可能。
4) 整个检测过程时间仅为2.256 s。
参考文献:
[1] 赵红玉, 魏博. 接触网鸟害防治方案研究[J]. 铁道标准设计, 2012(2): 98−101.ZHAO Hongyu, WEI Bo. Research into controll methods of bird strike damage on overhead contact system[J].Railway Standard Design, 2012(2): 98−101.
[2] 石轶, 刘常杰, 郭寅, 等. 基于双目视觉的接触网几何参数测量系统[J]. 红外与激光工程, 2014, 43(6):1936−1942.SHI Yi, LIU Changjie, GUO Yin, et al. Measurement system of geometric parameters for overhead line system based on binocular vision[J]. Infrared and Laser Engineering, 2014, 43(6): 1936−1942.
[3] 段汝娇, 赵伟, 黄松岭, 等. 基于计算机视觉的接触网定位器倾斜度自动测量方法[J]. 中国铁道科学, 2011,32(4): 82−87.DUAN Rujiao, ZHAO Wei, HUANG Songling, et al.Automatic measurement method of the catenary localizer slope based on computer vision[J]. China Railway Science, 2011, 32(4): 82−87.
[4] 韩烨, 刘志刚, 韩志伟, 等. 基于 SIFT特征匹配的高速铁路接触网支撑装置耳片断裂检测研究[J]. 铁道学报, 2014, 36(2): 31−36.HAN Ye, LIU Zhigang, HAN Zhiwei, et al. Fracture detection of ear pieces of catenary support devices of high-speed railway based on SIFT feature matching[J].Journal of the China Railway Society, 2014, 36(2):31−36.
[5] 郭晓旭, 刘志刚, 张桂南, 等. 角点配准与图像差分的接触网绝缘子故障检测[J]. 电力系统自动化学报,2015, 27(2): 8−14.GUO Xiaoxu, LIU Zhigang, ZHANG Guinan, et al. Fault detection of catenary insulator based on corner matching and image differencing[J]. Proceedings of the Chinese Society of Universities for Electric Power System and Automation, 2015, 27(2): 8−14.
[6] 江华. 鸟类识别与治理[M]. 北京: 中国三峡出版社,2007.JIANG Hua. Bird identification and management[M].Beijing: China Sanxia Publishing House, 2007.
[7] 上海铁路局. 关于印发《上海铁路局接触网安全巡检装置(C2)管理办法》的通知[Z]. 上海: [2013]219.Shanghai Railway Bureau. Notice of “Measures for the administration of the safety inspection device (C2) for contact network of Shanghai Railway Bureau”[Z].Shanghai: [2013]219.
[8] 冈萨雷斯. 数字图像处理[M]. 北京: 电子工业出版社,2005.Gonzalez R C. Digital image processing[M]. Beijing:Publishing House of Electronics Industry, 2005.
[9] Kiryati N, Eldar Y, Bruckstein A M. A probabilistic hough transform[J]. Pattern Recognition, 1991, 24(4):303−316.
[10] Sang U L, Chung S Y, Park R H. A comparative performance study of several global thresholding techniques for segmentation[J]. Computer Vision Graphics & Image Processing, 1990, 52(2): 171−190.
猜你喜欢
幼儿画刊(2023年6期)2023-07-18 07:01:40
云南画报(2021年10期)2021-11-24 01:06:38
减速顶与调速技术(2020年3期)2021-01-18 06:30:30
工程与建设(2019年4期)2019-10-10 01:45:46
制造技术与机床(2018年9期)2018-09-19 06:48:14
上海铁道增刊(2017年3期)2018-01-22 03:01:24
小学生导刊(2017年22期)2017-07-19 13:41:45
创新作文(小学版)(2016年3期)2016-11-11 05:44:24
西南交通大学学报(2016年3期)2016-06-15 20:29:35
现代工业经济和信息化(2016年4期)2016-05-17 05:35:37
