挖泥船泥浆浓度模糊PID控制器的设计研究
2018-04-26 01:40高国章杨雪帆武汉理工大学能源与动力工程学院湖北武汉430063武汉工程大学理学院
中国修船 2018年1期
高国章,张 帆,杨雪帆(.武汉理工大学 能源与动力工程学院,湖北 武汉 430063;.武汉工程大学 理学院,
湖北 武汉 430063)
目前,随着对港口航道的要求不断提高,我国的疏浚市场也越来越大,挖泥船作为疏浚作业的重要工具,由于其绞刀自动控制、泥浆浓度控制等技术问题,使船舶的疏浚效率得不到保障,从而导致挖泥船的自动化程度提高受到了一定的制约。为了进一步的提高挖泥船的工作效率和产量,国内外研究机构和制造单位从20世纪90年代就对疏浚作业过程的自动化进行研究,唐建中提出了疏浚系统泥浆浓度自校正前馈控制策略[1],朱文亮设计了泥浆浓度最优控制跟踪器[2],闭治跃提出一种挖泥船管道泥浆浓度输送系统效率优化评价方法[3]。
目前,对于挖泥船泥浆浓度控制主要是使用PID控制,传统的 PID 控制算法是使用最广泛的控制策略,其控制原理简单,但传统的PID控制由于系统被控对象的模型参数的非线性和时变性[4],用一组固定的参数进行控制,控制效果不佳。同时,实际工作过程中,由于工作环境复杂,绞刀的运动不断变化,泥浆的土质不稳定等原因,挖泥船的泥浆浓度很难得到稳定的控制。因此,为了提高挖泥船的作业效率、产量及自动化程度,针对泥浆浓度的控制问题,本文基于模糊PID理论的控制方法,将模糊控制与传统的 PID 控制结合起来,设计了一种可自动调整参数的模糊 PID 控制器。并用Matlab/Simulink进行建模仿真。仿真结果表明:模糊PID控制相较于PID控制对于泥浆浓度控制有较好的控制效果。
1 绞吸式挖泥船的基本组成与工作原理
挖泥船包含很多系统,其中较重要的系统有:土壤切削系统,驱动控制系统,泥浆输送系统,船舶定位系统,船舶电力系统等[5]。
工作原理:挖泥船绞刀借助水的运动,进行挖掘和输送转移水下土方,即将水下土层经过机械切割使之松动,使泥沙与水相混合,形成一定浓度的泥水混合体即泥浆,然后通过泥泵产生的真空吸出、再经过输泥管道输送到排泥场。
现今,在实际的疏浚过程中,对于参数的调整主要还是由施工工作业人员结合自己以往的施工经验和对疏浚作业过程的理解来给出调整方法。而对于几个自动控制系统的控制方法通常也都是采用传统的PID控制方法。
2 模糊PID控制的基本原理
2.1 PID控制原理
PID控制器是一种线性控制器[6]:
e(t)=r(t)-y(t),
(1)
KD×dt(t)/dt},
(2)
在实际的控制器中,e(t)为泥浆浓度输入信号与反馈信号的偏差值,并以此作为PID控制器的输入信号。r(t)为设定的泥浆浓度信号值,并以此作为PID控制器的输出,y(t)为系统的实际输出,KP、KI、KD分别称为比例系数、积分系数、 微分系数。
2.2 模糊PID控制原理
模糊PID控制器实际上包含PID控制器和模糊推理系统。模糊推理系统输入量为被控量偏差e和偏差变化率ec,经过解模糊化后得到参数KP、KI、KD作为PID调节器的输入量,随着输入量的不断变化,模糊PID系统输出量的控制量,实现PID参数的在线实时调整,不断调整不断完善,这样就可以使系统达到比较理想的控制效果,模糊PID控制的本质就是PID参数的在线自整定。
本文所用的模糊控制器为两输入三输出的结构,结构如图1所示。

图1 模糊PID控制器结构
根据PID控制理论,可知式(2)为PID控制器的时域传递函数表达式。对式(2)进行拉普拉斯变换,得到PID控制器的频域传递函数表达式为:
Gc(s)=Kp+KI/s+KPs
(3)
式中:s为函数频域上的变量。
在一般PID控制器的基础上,模糊PID控制器中建立PID三个参数与两个输入量之间的连续动态函数关系,参考相关文献,分析各参数对被控系统动态过程的控制影响,总结出参数、和自整定原则如下。
e和ec同号,KP应该适当增大,e和ec异号,KP应该适当减小;|e|较大时,取大点的KP和小点的KD,这样可以提高响应速度,取KI=0可减小超调量;|e|中等时,取较小的KP和适当的KD,可减小超调量并维持高的响应速度,取合适的KI可减小稳态误差;|e|较小时,取较大的KI和KP,这样系统有很好的稳态,取合适的KD,这样可使系统在平衡点附近不会出现震荡。
最终得到进入PID控制器的三个参数的公式:
(4)

3 模糊PID控制器的设计
1)输入量的模糊化。本文研究对象挖泥船的疏浚系统,设计控制器首先要确定模糊控制器的输入及输出变量,由于主要针对泥浆输送系统中泥浆密度的控制,因此将输泥管道的泥浆密度偏差e、转速偏差变化率ec作为设计的控制器输入变量,输出变量定义为ΔKP、ΔKI和ΔKD。其中,模糊控制器输入输出变量的模糊子集分别为e、ec、ΔKP、ΔKI、ΔKD变量的语言值为{ 负大,负中,负小,零,正小,正中,正大} ,记为{NB, NM, NS, Z, PS, PM, PB} ,并定义e和ec的论域为 (-6,6)。输入变量隶属度函数曲线如图2所示。

图2 输入变量e和ec隶属度函数曲线
为了更好地进行去模糊化,得到准确的清晰化的控制量,输出量ΔKP、ΔKI和ΔKD隶属度函数曲线则采用三角形与钟形结合,如图3所示。

图3 输出变量ΔKP、ΔKI和ΔKD隶属度函数曲线
2)模糊控制规则表的制定。在制定模糊控制规则时,当输入量偏差较大,那么控制规则制定以消除误差为主,当输入量偏差较小,偏差变化率较大,那么控制规则制定以系统稳定为主,可以有效防止系统超调。输出变量ΔKP、ΔKI和ΔKD的控制规则表[7]如表1所示。
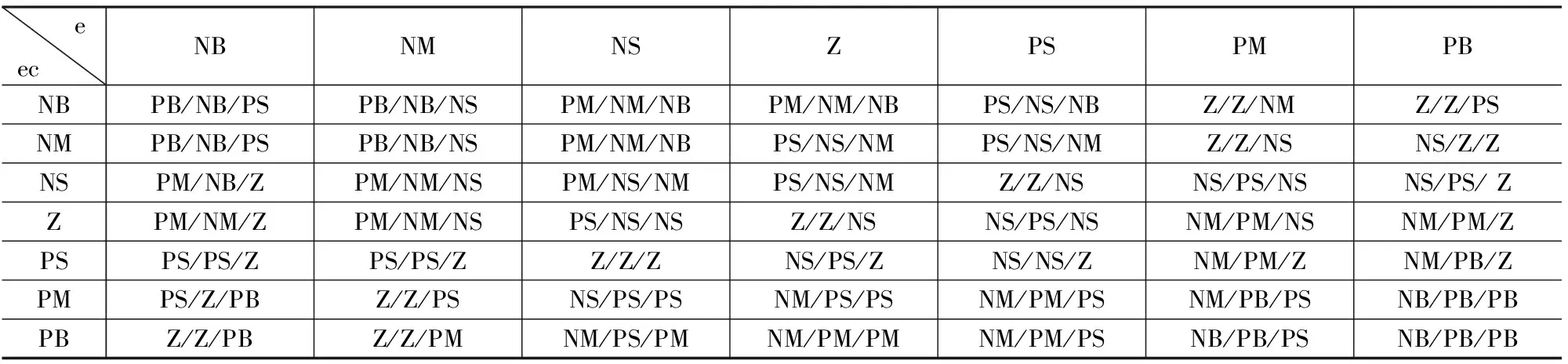
表1 ΔKP、ΔKI、ΔKD的控制规则表
鉴于所采用的模糊控制器的结构,两输入三输出,可设定总共49条模糊控制规则。
3)输出量模糊值去模糊化。去模糊化采用重心法[8]。同时,为了方便观察已设定的规则和变量形成的曲面,有利于直观的了解需要设计的模糊控制器,在Matlab中Fuzzy编辑框中可得出泥浆浓度模糊PID控制器ΔKP、ΔKI和ΔKD的输出曲面如图4所示。
4 控制系统的仿真
根据图1所示模糊PID控制器的控制方框图,建立整个系统仿真模型如图5所示。模型主要由模糊控制器,PID控制器,控制对象等组成。现根据对某挖泥船的实际调研,参考调研水域的实际状况,确定此挖泥船正常施工时泥浆浓度维持在1.2 g/cm3,泥浆浓度变化率为±10%。仿真时,根据实际工况,取泥浆浓度设定信号恒定为1.2,取绞刀系统传递函数为G(s)=1/0.08S2+2S+1,初始PID控制器的3个参数设置为KP=20.008,KI=3.03,KD=1.01。
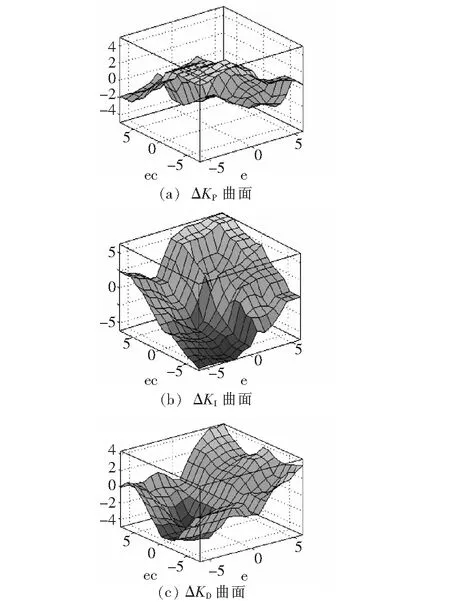
图4 ΔKP、ΔKI和ΔKD的曲面观测器界面
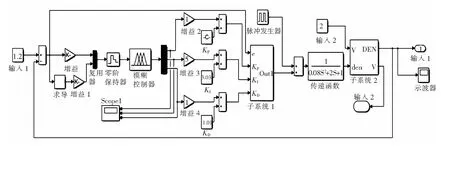
图5 泥浆浓度的模糊PID控制器仿真模型
在Matlab中运行仿真模型图后得到控制效果图如图6、7所示。
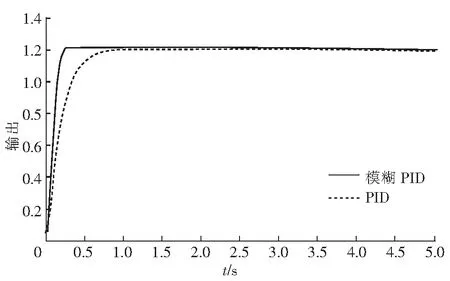
图6 PID控制器和模糊PID控制器控制曲线
在第2 s时加入一个脉冲信号得到的仿真结果如图7所示。

图7 PID控制器和模糊PID控制器控制曲线图
从效果图对比可以看出,模糊PID控制稳定性好于PID控制,常规PID控制器反应上升时间为1.28 s,而模糊PID控制器反应上升时间为0.35 s。而在第二秒加上一个脉冲信号时,PID控制的波峰值为1.29,稳定时间为0.72 s。而模糊PID控制器的波峰值为1.25 s,稳定时间为0.49 s。因此,常规的PID控制响应速度慢,存在滞后,调整时间长。模糊PID控制较PID控制器有响应速度快、调整时间短、几乎无超调的优点,控制效果对比如表2所示。

表2 PID控制与模糊PID控制效果对比表
在Matlab中运行仿真模型图后得到模糊系统输出控制量P、I、D变化曲线如图8所示。
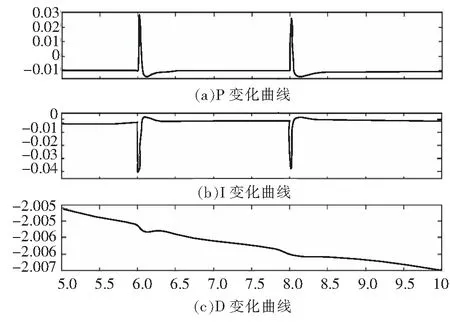
图8 模糊推理机控制量输出曲线图
在整个仿真过程中,模糊系统实现了PID控制参数P、I和D的在线整定,模糊推理机输出量的控制曲线如图7所示。当信号发生器产生正跳变,输出量ΔKP出现振荡,最后回归稳定值。究其原因,PID控制中比例参数KP的作用是加快系统的响应速度,提高系统的调节精度,随着KP的增大系统的响应速度越快,系统的调节精度越高。当信号发生器产生负跳变,输出量ΔKI出现振荡,最后回归稳定值。原因在于,系统在突然正跳变干扰下,为防止产生积分饱和现象,应适当减小积分作用参数KI。微分作用参数KD是为改善系统动态性能,其主要作用是在响应过程中抑制偏差变化方向恶化的趋势,对偏差变化进行提前预报,但是不能过大,否则会使响应过程提前制动,影响系统稳定性,并且会降低系统的抗干扰性能。
5 结束语
本文根据挖泥船的工作原理和作业流程,以及模糊理论的相关知识,设计了泥浆浓度控制器,开发了泥浆浓度模糊PID控制器的Matlab仿真平台。并对泥浆浓度控制器分别采用模糊PID和PID两种控制策略的控制效果进行了对比,仿真结果表明:模糊PID控制器对于泥浆浓度有更好的控制效果。模糊PID控制器较PID控制器有响应速度快、调整时间短、几乎无超调,控制效果较好等优点。
[1]唐建中. 绞吸式挖泥船疏浚作业优化与控制研究[D].杭州:浙江大学,2007.
[2]朱文亮,倪福生,王素红,等. 疏浚泥浆浓度最优控制跟踪器的设计与实现[J]. 计算机工程与应用,2016,(8):1-8.
[3]闭治跃,王庆丰,唐建中. 疏浚泥浆管道输送系统的节能机理及控制策略[J]. 浙江大学学报(工学版),2009,43(2):387-393.
[4]何炎平,谭家华,谷孝利,等.“宇大1号”大型绞吸式挖泥船设计要点[J]. 船海工程,2010,39(2):8-11.
[5]陈志坚,朱汉华,范世东,等. 泥浆质量浓度对挖泥船泥泵工况的影响[J]. 船海工程,2016,45(4):170-172.
[6]赵笑笑. 基于模糊理论与常规PID控制的模糊PID控制方法研究[J]. 山东电力技术,2009(6):54-56,63.
[7]德湘秩. 基于预测模型的模糊PID参数自整定控制算法的研究与实现[D]. 吉林:东北大学, 2008.
[8]田凡. 电液伺服系统模糊PID控制仿真与试验研究[D].太原:太原理工大学,2010.
猜你喜欢
水运工程(2022年3期)2023-01-08
电子设计工程(2022年15期)2022-08-17
商品与质量(2020年38期)2020-11-06
中国保健营养(2019年1期)2019-10-21
科技创新与应用(2019年17期)2019-06-09
中国港湾建设(2017年11期)2017-12-19
船海工程(2015年4期)2016-01-05
科技致富向导(2013年21期)2013-12-10
郑州大学学报(理学版)(2013年2期)2013-03-20
中国船检(2012年12期)2012-01-13